一种可旋转调整的定位装置的制作方法
1.本技术涉及医疗器械领域,尤其涉及一种可旋转调整的定位装置。
背景技术:
2.主动脉瓣狭窄(aortic stenosis,as)是常见的瓣膜疾病之一,美国75岁以上人群发病率为4.6%,是美国继冠心病和高血压之后第三位常见心血管疾病。长期以来,外科主动脉瓣置换是唯一被公认为长期有效的治疗方法。尽管如此,基于对外科手术的高风险评估和术后并发症的担忧,仍然有1/3
‑
2/3的患者放弃外科治疗,因此一旦出现症状则患者死亡率平均每年达50%
‑
60%。由于心脏介入手段和医疗器械的不断创新,内科导管治疗,尤其是经皮主动脉瓣置换术(percutaneous aortic valve replacement,pavr) 逐渐成为主流术式,临床试验证实其简便可行,为众多无法接受外科治疗的患者带来福音。
3.现行的经皮主动脉瓣置换术主要有三种手术途径的选择,即前向技术(经股静脉和房间隔穿刺)、逆向技术(经股动脉逆向进入主动脉弓)和非体外循环直接径路瓣膜置换技术(经心尖),其中以第二种最为方便快捷,被广泛采用。市面现有的支架定位装置以edwards球囊扩张的sapien瓣膜支架定位装置和corevalve自膨式的revalving瓣膜支架定位装置为代表,研发人员不断地提供技术方案和器械革新,以提高患者成活率,改善患者生活状况。
4.尽管如此,pavr在对目标人群的选择、长期疗效和手术后的并发症等多方面,依然存在诸多缺陷和技术难题尚未解决或克服。研究表明,瓣膜支架定位装置和操作技术的改进对抑制并发症,如主动脉穿孔、瓣周漏、血栓和脑卒中等,起到至关重要的作用。例如,在专利cn201110092241.x中,爱德华生命科学公司提供了一种心瓣膜定位装置(10),其中人造瓣膜(16)被装在输送套管(24)里面的瓣膜导管(23)上。阶段球囊(18)从输送套管伸出并且提供锥形的表面,用于方便前进通过人体脉管。该阶段球囊还有助于通过自体瓣膜的小叶。在人造瓣膜被定位在自体瓣膜内之后,该输送套管缩回以露出该人造瓣膜。在一个实施例中,输送套管通过利用丝杠(500)而被缩回,该丝杠在瓣膜导管和输送套管之间实现相对运动。人造瓣膜优选是自扩展的。如果需要,阶段球囊可以被扩展以牢固地将人造瓣膜安放在自体瓣膜部位处。人造瓣膜优选由多个柔性延伸臂(80)连接于瓣膜导管,在人造瓣膜的初始展开之后该柔性延伸臂使人造瓣膜能够皱缩,因此如有需要则人造瓣膜可以被重新定位。该现有技术的技术方案的缺陷在于,人造瓣膜在进入心内释放进行定位时,需要对人造瓣膜进行周向位置上的调整,以使得人造瓣膜定位能更加精准,而该现有技术的方案中没有可使人造瓣膜在周向位置上实现调整的设计,这使得瓣膜在定位时不能对定位位置进行调整,使其人造瓣膜在心内定位时必须一步到位,容错率很低,大大提升了手术的风险系数。
5.如上所述,现有的主动脉瓣膜置换手术和装置,没有能使得瓣膜假体在心内释放定位件之后、能进行周向位置调整的设计,因此无法保证定位件在定位时能更加精准地入窦而降低其手术风险。
6.因此,本领域中存在对操作更为简单、定位更加精准、手术并发症较少、手术时间较短的用于植入器械如瓣膜的定位系统的迫切需求。
技术实现要素:
7.鉴于以上以及其它更多的构思而提出了本技术。
8.本技术的目的之一是克服现有技术的不足,针对例如诸如主动脉狭窄之类的心血管疾病且需要介入治疗的患者提供一种新型的可旋转调整的定位装置。
9.根据本技术的另一方面,提供了一种可旋转调整的定位装置,包括:固定件;可旋转地连接在固定件远侧的大体上纵长地延伸的连接机构;和至少一根操纵线;其中,固定件设有导引通道;操纵线的一端连接在连接机构上,另一端穿过相应的导引通道连接至操控机构;并且,其中,通过操控机构操作操纵线使连接机构相对于固定件旋转,实现对连接机构和与之关联的部件的周向位置的调整。
10.根据一实施例,固定件的形状选自下列中的一者:伞罩形、圆筒、截头锥体、棱柱和套筒。
11.根据一实施例,导引通道的定位选自下列中的至少一者:导引通道位于固定件中;和导引通道设置在固定件的外周。
12.根据一实施例,导引通道是设置在固定件中的大体上轴向地延伸的通孔、通道、开槽或导轨。
13.根据一实施例,固定件包括内套筒和套在内套筒外周的外套筒;其中,导引通道设置在内套筒和外套筒的至少一者中,并且大体上轴向地延伸;或者,导引通道由内套筒和外套筒之间的间隙形成。
14.根据一实施例,至少一根操纵线包括第一操纵线和第二操纵线。
15.根据一实施例,第一操纵线和第二操纵线共用一条导引通道;或者,第一操纵线和第二操纵线设置成分别穿过两条彼此独立的导引通道。
16.根据一实施例,在所述连接机构的外周设有下列中的一者:沿周向地布置和间隔开的第一连接部和第二连接部;和从所述连接机构的外周向外地突出的单个连接部。
17.根据一实施例,第一连接部和第二连接部是从连接机构的外周向外突出的小柱、短桩、挂钩或凸台,第一操纵线和第二操纵线的一端以拴、系、绑或其它固定方式连接在相应的第一连接部和第二连接部上;并且其中,第一连接部和第二连接部对称地布置在导引通道的两侧。
18.根据一实施例,操控机构设有卷线杆,第一操纵线穿过导引通道以顺时针或逆时针方向绕在卷线杆上的一侧,并且第二操纵线穿过导引通道以与之相反的逆时针或顺时针方向绕在卷线杆上的另一侧。
19.根据一实施例,在卷线杆上的一侧设有穿孔形式的第一绕线部位,并且在卷线杆上的另一侧设有穿孔形式的第二绕线部位。
20.根据一实施例,操控机构还包括中空的外壳体,和用于转动卷线杆的控制旋钮;并且卷线杆的一端与控制旋钮可操作地连接;并且卷线杆的另一端位于外壳体的中空内部。
21.根据一实施例,当操作操控机构使第一操纵线处于张紧状态时,第二操纵线处于松弛状态;并且,当操作操控机构使第二操纵线处于张紧状态时,第一操纵线处于松弛状
态。
22.根据一实施例,连接部的可旋转调整的角度的可变范围预设在
‑
60至60之间。
23.根据一实施例,在连接机构的垂直于轴向的横截面上,第一连接部、第二连接部各自的中心与连接机构的中心之间的两条连线所形成的夹角为α,夹角α的可变范围由连接部的可旋转调整的角度的可变范围决定;并且,从连接部至对应的导引通道的操纵线在张紧状态下与各自的导引通道的中心线之间的所形成的夹角为β,其中夹角α随着夹角β的变化而变化。
24.根据一实施例,夹角α在0<α≤180的范围内,例如,120≤a≤150。
25.根据一实施例,夹角β在0<β<90、例如30<β<75的范围内。
26.根据一实施例,根据上述权利要求中任一项的定位装置,其中,连接机构包括:具有大体筒状主体的连接装置;安装在连接装置近端的转动装置;和限制丝;其中,限制丝的一端固定在转动装置上,并且限制丝的另一端延伸经过连接装置而与位于连接装置远端的植入假体可拆卸地连接。
27.根据一实施例,植入假体是人工心脏瓣膜假体,人工心脏瓣膜假体包括组装在一起的支架主体和定位件。
28.根据一实施例,人工心脏瓣膜假体是主动脉瓣膜假体,并且定位件的数量是3个。
29.根据一实施例,定位装置进一步包括内芯管和中层鞘管;其中,连接装置套设在内芯管的外周,转动装置套设在中层鞘管的外周,并且中层鞘管相对于内芯管可轴向地移动。
30.根据本技术的另一方面,还提供了一种可旋转调整的定位装置,包括:连接机构、固定件和操纵线;固定件上配置有导引通道;操纵线一端与连接机构连接,另一端穿过导引通道;并且,操控操纵线可使得连接机构相对固定件周向转动。
31.根据一实施例,导引通道设有2个,并且2个导引通道之间相互独立,避免操纵线发生缠绕的情况。
32.根据一实施例,部分导引通道被设置在固定件的内部,同时部分导引通道被设置在固定件的外周。
33.根据一实施例,导引通道可以是固定件上轴向设置的通孔。
34.根据一实施例,通孔设置为倒圆结构,避免割伤操纵线。
35.根据一实施例,固定件外周设置有导轨,导引通道设置在导轨内。
36.根据一实施例,当定位装置被用于主动脉置换手术时,人工心脏瓣膜假体包括支架主体和定位件,人工心脏瓣膜假体通过先释放定位件,使得定位件定位至主动脉窦底,完成预先定位,随后再释放支架主体。
37.根据一实施例,植入假体是血管支架或者瓣膜夹。
38.根据一实施例,当植入假体被输送至人体内需要周向调整角度时,可以操作操控机构,使得操纵线带动连接机构,并进一步带动植入假体周向旋转。
39.根据一实施例,定位装置包括限制丝,连接装置包括连接孔,植入假体设有拆卸孔,预装时,拆卸孔穿过连接孔,限制丝的一端穿过拆卸孔完成连接,其中,限制丝的另一端延伸至体外操作。
40.根据一实施例,操纵线选自下列项中的一者:丝线、绳、缆索、绞线、股线、金属丝、柔性带和它们的任意组合。
41.根据本技术的另一方面,还提供了一种可旋转调整的定位装置,包括:固定件;可旋转地连接在固定件远侧的大体上纵长地延伸的连接机构,在连接机构的外周设有沿周向地布置和间隔开的第一连接部和第二连接部;第一操纵线和第二操纵线,其中,固定件设有导引通道,并且第一操纵线和第二操纵线共用一条导引通道,或者分别穿过两条彼此独立的导引通道;其中,第一操纵线和第二操纵线的一端分别连接在第一连接部和第二连接部上,并且它们的另一端穿过相应的导引通道连接至操控机构上的相应部位;其中,当操作操控机构使第一操纵线处于张紧状态时,第二操纵线处于松弛状态;当操作操控机构使第二操纵线处于张紧状态时,第一操纵线处于松弛状态,使得连接机构相对于固定件可在彼此相反的两个旋转方向上旋转,从而实现对连接机构和与之关联的部件的周向位置的可调。
42.根据本技术的另外一方面面,还提供了一种可旋转调整的定位装置,包括:固定件;可旋转地连接在固定件远侧的大体上纵长地延伸的连接机构,在连接机构上设有单个连接点;单根操纵线,其中,固定件设有单个导引通道;其中,操纵线的一端与绕设在连接机构的单个连接点处的弹力复位机构相连,并且另一端穿过导引通道连接至操控机构;并且,通过操控机构操作操纵线张紧而使连接机构相对于固定件旋转,在松开操纵线后,弹力复位机构使连接机构反向旋转。
43.与现有技术相比,本技术的技术方案的优点至少包括如下:现有技术中,通常是通过控制、旋转管子的末端,通过旋转将力传递到管子的另一端以达到调节角度的目的,而管子在旋转的过程中会产生扭转力,导致其调节不够精准,尤其当管子的长度更长或面对复杂扭曲血管形态时,调节的精度会急剧降低,存在调节延迟甚至无法调节的问题,而在血管入路中调节时,由于血管本身存在一定程度的多处扭曲,进一步增加了调节的难度及及时性,不利于手术的定位操作。根据本技术的一个构思,可利用拉动操纵线来调节连接端与导引通道在固定件的横截面上所成的夹角,该拉动的力的绝大部分都集中作用于导引通道与连接端之间,损耗极小,并且对该调节的反馈非常及时且精准度高。
44.根据本技术的一个构思,操纵线包括第一操纵线和第二操纵线,通过顺时针操控操控机构,可以使得第一操纵线带动连接机构按顺时针方向旋转,而在逆时针操控操控机构时,可以使得第二操纵线带动连接机构按逆时针方向旋转,根据该构思的结构简单,调节非常便捷,并且对定位装置装配要求低。
45.根据本技术的一个构思,第一操纵线的一端与第一绕线部位连接,第一操纵线的另一端部分按顺时针方向缠绕在卷线杆上。第二操纵线的一端与第二绕线部位连接,并且第二操纵线的另一端部分按逆时针方向缠绕在卷线杆上。该构思的配置能满足植入假体在周向方向上的以及对角度的调节,同时该构思的设计及其装配简单,成本低,更有利于以低成本、高可靠性投入批量工业生产。
46.根据本技术的技术方案的以上构思,以及其它构思,可以解决现有技术中存在的诸多技术问题和缺陷,例如,瓣膜假体在定位件释放后无法再精准地调整瓣膜假体的周向位置,使其定位件的定位入窦不够精准,对瓣膜假体的释放无限制将可能导致支架在心内释放时偏离或者甚至脱离预期位置,等等。
47.本技术的实施例能够实现其它未一一列出的有利技术效果,这些其它的技术效果在下文中可能有部分描述,并且对于本领域的技术人员而言在阅读了本技术后是可以预期
和理解的。
附图说明
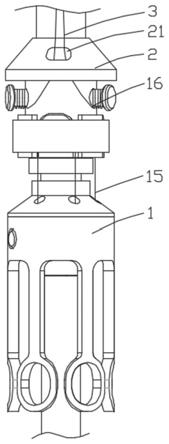
48.通过参考下文的描述连同附图,这些实施例的上述特征和优点及其他特征和优点以及实现它们的方式将更显而易见,并且可以更好地理解本技术的实施例,在附图中:图1a为根据本技术一实施例的连接机构、固定件和操纵线的示意图。
49.图1b为图1所示实施例在周向旋转了一定角度后的另一视图。
50.图2a
‑
2d为不同形式的导引通道及其与操纵线、连接部之间的关系的示意图。
51.图3a
‑
3b为根据本技术一实施例的植入假体定位装置的示意图。
52.图4a
‑
4d为根据本技术一示例的操控机构的结构示意图。
53.图5a
‑
5g为根据本技术另一实施例的植入假体定位装置的示意图。
54.图6a
‑
6c为本技术的固定件的另一示例的示意图。
55.图7a
‑
7c为本技术另一实施例的结构示意图。
56.图8a
‑
8c为本技术另一实施例的结构示意图。
57.附图中各数字所指代的特征如下:1
‑
连接机构,11
‑
第一连接部,12
‑
第二连接部,13
‑
连接装置,131
‑
通孔,14
‑
转动装置,15
‑
限制丝,2
‑
固定件,21
‑
导引通道,22
‑
内套筒,23
‑
外套筒,3
‑
操纵线,31
‑
第一操纵线,32
‑
第二操纵线,33
‑
弹力回复机构,4
‑
植入假体,41
‑
支架主体,42
‑
定位件,5
‑
操控机构,51
‑
外壳体,52
‑
卷线杆,521
‑
第一绕线部位,522
‑
第二绕线部位,53
‑
控制旋钮,6
‑
内芯管,7
‑
中层鞘管。
具体实施方式
58.在以下对附图和具体实施方式的描述中,将阐述本技术的一个或多个实施例的细节。从这些描述、附图以及权利要求中,可以清楚本技术的其它特征、目的和优点。
59.应当理解,所图示和描述的实施例在应用中不限于在以下描述中阐明或在附图中图示的构件的构造和布置的细节。所图示的实施例可以是其它的实施例,并且能够以各种方式来实施或执行。各示例通过对所公开的实施例进行解释而非限制的方式来提供。实际上,将对本领域技术人员显而易见的是,在不背离本技术公开的范围或实质的情况下,可以对本技术的各实施例作出各种修改和变型。例如,作为一个实施例的一部分而图示或描述的特征,可以与另一实施例一起使用,以仍然产生另外的实施例。因此,本技术公开涵盖属于所附权利要求及其等同要素范围内的这样的修改和变型。
60.同样,可以理解,本文中所使用的词组和用语是出于描述的目的,而不应当被认为是限制性的。本文中的“包括”、“包含”或“具有”及其变型的使用,旨在开放式地包括其后列出的项及其等同项以及附加的项。
61.下面将参考本技术的若干方面的不同的实施例和示例对本技术进行更详细的描述。
62.在本技术中,术语“近端”或“近侧”是指离手术操作者较近的一端或一侧,“远端”或“远侧”是指离手术操作者较远的一端或一侧。
63.在现有技术中,通常是通过控制、旋转管子的末端,通过旋转将力传递到管子的另
一端以达到调节角度的目的。管子在旋转过程中会产生扭转力,导致对其的调节不够精准,尤其当管子的长度较长或面对复杂扭曲形态的血管时,对其进行调节的精度会急剧降低,甚至存在调节延迟或无法调节的问题。而且,在血管入路中执行管子的调节时,由于血管本身存在一定程度的多处扭曲,进一步增加了调节的难度和不及时性,从而不利于手术的定位操作。
64.以下所述的实施例的其中一个目的是旨在解决上述缺陷,以及其它问题。
65.实施例一如图1a和1b所示,图示了根据本技术一实施例的可用于主动脉瓣膜手术的一种可旋转调整的定位装置,包括固定件2、可旋转地连接在固定件2远侧的大体上纵长地延伸的连接机构1,和例如丝线、绳、缆索、绞线、股线、金属丝、柔性带等柔性形式的操纵线3。在例如可为大体伞罩状的固定件2上设有例如可为通孔、通道等形式的导引通道21,如图2a所示。如图1a和1b所示,操纵线3的一端与连接机构1连接,例如栓、系或绕在连接机构1的连接端16处,而其另一端延伸通过固定件2的导引通道21而与操控机构5可操作地连接。在连接端16部位可以设有连接部,例如为便于栓、系或绕上操纵线3的、例如径向凸出的小柱或短桩,图中显示了两个这样的沿连接机构1的主体周向地布置的小柱或短桩形式的连接部,这将在下文中详细描述。这样,例如通过拉拽操控操纵线3,可使得连接机构1相对于固定件2沿周向地运动,例如旋转。在本实施例中,通过拉拽操纵线3,可调节连接端16与导引通道21在连接机构1的垂直于轴向的横截面上所成的夹角α(如图2d所示)。该拉拽的作用力绝大部分都集中于导引通道21与连接端16之间的操纵线3,因此对操纵线3和整个装置的损耗极小,对该拉拽调节动作的反馈非常及时,且精准度高。
66.在本实施例中,作为其中一个优选的示例,导引通道21可设置为穿过固定件2主体的通孔或通道,其大体上沿着拉拽操纵线3的预设方向延伸,如图2a所示,其例如大体上轴向延伸。
67.作为另一示例,导引通道21可设置在具有大体筒状主体的固定件2的外周,如图2b所示,其形式为在固定件2的大体筒状主体的沿周向间隔开的两个径向凸出的凸台之间穿过的轴向地延伸的通道。
68.作为另外一个示例,导引通道21的形式为图2a所示导引通道和图2b所示导引通道的组合,其中各自容纳操纵线3的一部分以便于其在操作过程中被引导拉拽。在本示例中,导引通道21的数目可为2个,并且该2个导引通道21之间相互独立,以避免操作过程中发生操纵线3的缠绕。
69.在本实施例中,定位装置还可包括植入假体4和操控机构5。植入假体4可连接在连接机构1的远端或远侧,并可随之一起转动。操纵线3的另一端,即,设计为与操控机构5相连的那一端,延伸通过导引通道21与操控机构5(例如如图4a
‑
4d所示)连接。这样,操作人员,例如手术医生,可操纵操控机构5来方便卷绕(张紧)和释放(松弛)操纵线3,由此操纵与操纵线3相连的连接机构1相对于固定件2周向地转动。
70.根据一个示例,操控机构5可包括组装在一起的外壳体51、卷线杆52和控制旋钮53,如图4a
‑
4d所示。卷线杆52的一端与控制旋钮53固定连接,卷线杆52的另一端突出并设置在中空外壳体51内部。操纵线3可以卷绕在卷线杆52上。例如,卷线杆52上可设有例如为穿孔形式的第一绕线部位521和第二绕线部位522,如图4d所示。第一操纵线31例如以系紧、
绑定、粘附等方式固定在第一绕线部位521,并且以顺时针或者逆时针方向绕在卷线杆52上(例如可在第一绕线部位521若绕干匝)。第二操纵线32同样例如以系紧、绑定、粘附等方式固定在第二绕线部位522,并且以与第一操纵线31的卷线方向相反的方向,即逆时针方向或顺时针方向,而绕在卷线杆52上(例如可包括在第二绕线部位522绕若干匝)。
71.当控制旋钮53顺时针转动时,第一操纵线31处于张紧(卷绕)状态并进一步驱动与之相连的连接机构1例如顺时针旋转,此时第二操纵线32处于松弛(释放)状态。
72.当控制旋钮53逆时针转动时,第二操纵线32处于张紧(卷绕)状态并进一步驱动与之相连的连接机构1例如逆时针旋转,此时第一操纵线31处于松弛(释放)状态。
73.根据一个示例,连接机构1可包括具有例如大体筒状主体的连接装置13、安装在连接装置13近端的转动装置14,和限制丝15。限制丝15的一端固定在转动装置14上,例如栓在或者系在转动装置14上;限制丝15的另一端穿过连接装置13上的通孔131而与位于连接装置13远端的植入假体4可拆卸地连接,如图3a
‑
3b所示。
74.植入假体4可以是人工心脏瓣膜假体,并且人工心脏瓣膜假体可包括组装在一起的支架主体41和定位件42,如图3a和5b所示。
75.根据一个示例,可通过先释放定位件42使之定位至主动脉窦底,来完成人工心脏瓣膜假体的预先定位,在随后的手术程序中再释放支架主体41。
76.在手术操作中,在植入假体4被输送至人体心内的过程中需要周向地调整角度时,手术医生可以操作操控机构5的控制旋钮53带动绕在卷线杆52上的操纵线3,如图4a
‑
4d所示,使得操纵线3驱动与之相连的连接机构1相对于固定件2顺时针或者逆时针地旋转,该旋转则进一步带动与连接机构1相连的植入假体4周向地旋转,如下所详细描述。
77.在手术操作中,连接机构1在连接端16处设有例如为短桩、小柱形式的第一连接部11和第二连接部12,如图3a所示。操纵线3例如以栓或系的方式连接在第一连接部11和第二连接部12。当第一操纵线31拉动第一连接部11周向地转动时,与连接机构1相连的植入假体4例如可沿顺时针方向周向旋转。当第二操纵线32拉动第二连接部12周向地转动时,与连接机构1相连的植入假体4例如可沿逆时针方向周向旋转。
78.在连接机构1的垂直于轴向的横截面上,第一连接部11、第二连接部12各自的中心与连接机构1的中心之间的两条连线所形成的夹角为α,夹角α的可变范围由连接部11的可旋转调整的角度的可变范围决定。
79.根据一个示例,夹角α在0<α≤180的范围内,例如,120≤a≤150。
80.由于主动脉窦有3个窦底,且在圆周上是均匀分布的,因此相邻的窦底之间与主动脉瓣膜中心的连线的夹角为约120。植入假体4的定位件42与主动脉窦的窦底相匹配地设有3个的数量。如上所述,手术医生操纵操控机构5,即可方便且精确地驱动植入假体4顺时针转动或者逆时针转动,以便例如将定位件42定位至对应的窦底。定位件42在输送至心内时在逆时针方向或顺时针方向上的最大旋转角度为约60,因此夹角α的一个优选的数值为约120。
81.根据一个示例,在固定件2的垂直于轴向的横截面上看去,第一连接部11、第二连接部12关于导引通道21的中心左右对称地布置。通过这样的布置,可以保证植入假体4在周向上,无论是沿逆时针方向还是顺时针方向,都能根据需要方便精确地调整至理想的植入位置。
82.根据一个示例,定位装置还可进一步包括内芯管6和中层鞘管7,如图3b所示。其中,连接装置13套设在内芯管6的外周,转动装置14套设在中层鞘管7的外周,并且中层鞘管7能相对于内芯管6轴向地移动。通过中层鞘管7相对于内芯管6向近端沿轴向地移动,可实现连接装置13与植入假体4的组装和拆卸。
83.定位装置的操作过程包含以下步骤。
84.1)操作定位装置通过经血管的入路方式进入心内,随后释放植入假体4上的定位件42至心内的预期位置,如图5a和5b所示。
85.2)观察定位件42相对于主动脉窦的当前位置,如果该位置未达到理想的预期位置,手术医生可通过操作操控机构5来拉拽相应的操纵线3,使操纵线3带动与之相连的连接机构1的转动装置14旋转,转动装置14的旋转转而带动连接在转动装置14上的限制丝15旋转,限制丝15转而带动与之相连的连接装置13和植入假体4一起旋转,实现对植入假体4的定位件42的位置的调整,从而最终实现将定位件42定位至窦底的理想预期位置,如图5c所示。
86.3)当定位件42到达窦底的理想预期位置时,如图5d所示,进一步释放支架主体41就位。之后,撤离定位装置,完成植入手术,如图5e
‑
5g所示。
87.实施例二实施例二与实施例一大体上相同,不同之处在于具有不同构造的固定件。
88.如图6a所示,图示了可用于主动脉瓣膜手术的一种可旋转调整的定位装置,包括固定件2、可旋转地连接在固定件2远侧的大体上纵长地延伸的连接机构1,和例如丝线、绳、缆索、股线、金属丝等柔性形式的操纵线3。
89.在本实施例二中,固定件2包括内套筒22和套在内套筒22外周的外套筒23。在固定件2中设有大体上轴向地延伸的通孔、通道或槽道形式的导引通道21。如图6b所示,导引通道21可以是设在内套筒22处、且位于内套筒22和外套筒23之间的轴向延伸的槽道,便于操纵线3从中穿过。如图6c所示,导引通道21可以是设在外套筒23处、且位于内套筒22和外套筒23之间的轴向延伸的槽道,便于操纵线3从中穿过。
90.与实施例一大体上类似地,操纵线3一端与连接机构1连接,例如栓、系或绕在连接机构1的连接端16处,并且另一端延伸穿过固定件2中的导引通道21而与操控机构5可操作地连接。这样,通过操纵操控机构5就可以拉拽操纵线3,从而可使得与之相连的连接机构1的转动装置14相对于固定件2沿周向旋转。转动装置14转而带动连接在转动装置14上的限制丝15旋转,限制丝15转而带动与之相连的连接装置13和植入假体4一起旋转,实现对植入假体4的定位件42的位置的调整,从而最终实现将定位件42定位至窦底的理想预期位置。
91.就此而言,实施例二的相关构造和构思类似于实施例一,因此在这里不再重复描述。
92.实施例三实施例三与实施例一大体上相同,不同之处在于该实施例采用单个连接部11、单根操纵线3以及两个导引通道21。
93.如图7a所示,图示了可用于主动脉瓣膜手术的一种可旋转调整的定位装置,包括固定件2、可旋转地连接在固定件2远侧的大体上纵长地延伸的连接机构1,和例如丝线、绳、缆索、股线、金属丝等柔性形式的操纵线3。
94.在本实施例三中,导引通道21可设置为穿过固定件2主体的通孔或通道,其大体上沿着拉拽操纵线3的预设方向延伸,如图7a所示,其例如大体上轴向延伸。
95.在本实施例三中,导引通道21的数目可为2个,并且该2个导引通道21之间相互独立,以避免操作过程中发生操纵线3的缠绕(在本实施例中,2个导引通道之间也存在预设角度)。
96.在本实施例三中,连接部11的可旋转调整的角度的可变范围预设在
‑
60至60之间。
97.在本实施例三中,从连接部11至对应的导引通道21的操纵线3在张紧状态下与各自的导引通道21的中心线之间的所形成的夹角为β,夹角β在0<β<90、例如30<β<75的范围内。
98.在本实施例三中,如图7b所示,操纵线3为一根线,操纵线3与连接部11配合连接,其连接方式可以拴、系、绑或其他的固定方式连接,操纵线3的一端穿过第一导引通道211,操纵线3的另一端穿过第二导引通道212;同时操纵线3的两端均与操纵机构5可操作地连接。这样,通过操纵操纵机构5就可以拉拽操纵线3,从而可使得与之相连的连接机构1的转动装置14相对于固定件2沿周向旋转。转动装置14转而带动连接在转动装置14上的限制丝15旋转,限制丝15转而带动与之相连的连接装置13和植入假体4一起旋转,实现对植入假体4的定位件42的位置的调整,从而最终实现将定位件42定位至窦底的理想预期位置。
99.就此而言,实施例三的相关构造和构思类似于实施例一,因此在这里不再重复描述。
100.实施例四实施例四与实施例一大体上相同,不同之处在于该实施例采用单个连接部11,单个导引通道21以及单根操纵线3,并且操纵线3包括弹力复位机构。
101.如图8a所示,图示了可用于主动脉瓣膜手术的一种可旋转调整的定位装置,包括固定件2;可旋转地连接在所述固定件2远侧的大体上纵长地延伸的连接机构1,在所述连接机构1上设有单个连接部11;单根操纵线3,其中,所述固定件2设有单个导引通道21;其中,所述操纵线3的一端与绕设在所述单个连接部11处的弹力复位机构33相连,并且另一端穿过所述导引通道21连接至所述操控机构5;并且,其中,通过所述操控机构5操作所述操纵线3张紧而使所述连接机构1相对于所述固定件2旋转,在松开所述操纵线3后,所述弹力复位机构33使所述连接机构1反向旋转。
102.在本实施例四中,弹力复位机构33可以设置为弹簧或者其他弹力回复功能的构件。
103.在本实施例四中,导引通道21可设置为穿过固定件2主体的通孔或通道,其大体上沿着拉拽操纵线3的预设方向延伸,如图7a所示,其例如大体上轴向延伸。
104.在本实施例四中,如图8b和图8c所示,操纵线3为一根线,操纵线3与连接部11配合连接,其连接方式可以拴、系、绑或其他的固定方式连接,操纵线3的一端与连接部11连接,并且操纵线3的弹力复位机构33缠绕于连接机构1上,操纵线3的另一端穿过导引通道21与操控机构5可操作地连接。这样,通过操纵操纵机构5就可以拉拽操纵线3,从而可使得与之相连的连接机构1的转动装置14相对于固定件2沿周向旋转。转动装置14转而带动连接在转动装置14上的限制丝15旋转,限制丝15转而带动与之相连的连接装置13和植入假体4一起
旋转,实现对植入假体4的定位件42的位置的调整,同时,当需要反向调整旋转角度时,只需松开操纵线3,由于操纵线3的弹力复位机构33有弹性回复力,可以往反方向旋转调整一定角度,从而最终实现将定位件42定位至窦底的理想预期位置。
105.就此而言,实施例四的相关构造和构思类似于实施例一,因此在这里不再重复描述。
106.出于说明的目的而提出了对本技术的对若干个实施例的前文描述。所述前文描述并非意图是穷举的,也并非将本技术限于所公开的精确配置、构造和/或步骤,显然,根据上文的教导,可作出许多修改和变型。本发明的范围和所有的等同者旨在由所附权利要求限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1