一种手术室护理患者肢体固定架
1.本发明涉及医疗的技术领域,具体为一种手术室护理患者肢体固定架。
背景技术:
2.手术指医生用医疗器械对病人身体进行的切除、缝合等治疗,以刀、剪、针等器械在人体局部进行的操作,来维持患者的健康,是外科的主要治疗方法,俗称“开刀”,目的是医治或诊断疾病,如去除病变组织、修复损伤、移植器官、改善机体的功能和形态等,其中肢体手术中经常使用到固定支架,现有的固定支架在使用时一般只能进行直角调节,这样在实际的手术中由于病人的病灶部位可能处于肢体的各个部位,这样就会增加的医生手术的操作难度和增加手术的风险,现有的固定支架对于病人肢体的定位紧固一般通过医生的手动操作,这样降低了手术的效率,同时手术中肢体一般需要多次活动更换部位,也极大增加医生的手术劳动强度,普通的固定支架不具有较好的控制对病人肢体接触部位的夹持力,进而会出现夹持过紧和过松的问题。
3.所以针对这些问题,我们需要一种手术室护理患者肢体固定架来解决,通过活动块医生简单便捷的实现调节杆一和调节杆二的多角度调节,同时在连杆一和连杆二形成连杆的死点机构将移动板与滑杆稳定的接触,有效的防止活动块的滑动造成病人肢体活动影响手术的事件发生,提高了角度调节机构的整体机构的可靠性。
技术实现要素:
4.针对现有技术的不足,本发明提供了一种手术室护理患者肢体固定架,具备多角度调节、结构强度高、智能夹持、安全、效率高的优点,解决了有的固定支架在使用时一般只能进行直角调节,这样在实际的手术中由于病人的病灶部位可能处于肢体的各个部位,这样就会增加的医生手术的操作难度和增加手术的风险,现有的固定支架对于病人肢体的定位紧固一般通过医生的手动操作,这样降低了手术的效率,同时手术中肢体一般需要多次活动更换部位,也极大增加医生的手术劳动强度,普通的固定支架不具有较好的控制对病人肢体接触部位的夹持力,进而会出现夹持过紧和过松的问题。
5.为实现上述多角度调节、结构强度高、智能夹持、安全、效率高的目的,本发明提供如下技术方案:一种手术室护理患者肢体固定架,包括滑杆,所述滑杆的外部活动连接有角度调节机构,角度调节机构包括活动块、对活动块进行紧固的定位组件、用于固定架长度调节的伸长组件,活动块滑动连接在滑杆的外部,定位组件活动连接在活动块的外部,伸长组件活动连接在活动块的外部。
6.优选的,所述定位组件包括卡环,卡环固定连接在活动块的外部,卡环的外部活动连接有连杆一,连杆一的外部活动连接有连杆二,卡环的外部固定连接有支撑杆,支撑杆的外部滑动连接有移动板,移动板外部固定连接有摩擦球,移动板的外部固定连接有铁板,铁板的外部固定连接有弹性绳,支撑杆的外部固定连接有线圈。
7.优选的,所述伸长组件包括调节杆一,调节杆一固定连接在活动块的外部,调节杆
一的外部滑动连接有调节杆二,调节杆二的外部螺纹连接有螺杆。
8.优选的,所述调节杆二的外部活动连接有对病人肢体紧固定位的固定机构,固定机构包括安装壳,安装壳固定连接在调节杆二的外部,安装壳的表面开设有出口,安装壳的内部固定连接有电机,安装壳的内部活动连接有链轮,链轮的外部传动连接有链条,链条的外部活动连接有传动块,安装壳的内部固定连接有导杆,导杆的外部滑动连接有往复块,往复块的外部固定连接有限位杆,往复块的外部固定连接有定位环,定位环的外部固定连接有遮挡布,定位环的内侧固定连接有气囊,气囊的内侧固定连接有触杆,定位环的内侧固定连接有触点,安装壳外部固定连接有顶板。
9.优选的,所述活动块的外部固定连接有提环,活动块的外部固定连接有按钮,活动块的外部固定连接有外部电源。
10.优选的,所述连杆二的两端分别活动连接在连杆一的外部和移动板的外部,移动板与活动块的位置相对应且规格相匹配,摩擦球与活动块的位置相对应且规格相匹配,铁板与线圈的位置相对应且规格相匹配,弹性绳的两端分别固定连接在铁板的外部和支撑杆的外部,螺杆与调节杆一的位置相对应且规格相匹配。
11.优选的,所述电机与链轮固定连接,出口与定位环的位置相对应且规格相匹配,传动块与限位杆滑动连接,定位环的数量为两个,一个定位环的固定连接在往复块的外部,另一个固定连接在安装壳外部,两个定位环的位置相对应且规格相匹配,遮挡布的两端分别固定连接在定位环的外部和出口的内侧,遮挡布用于防止液体进入安装壳的内部,遮挡布和出口的位置相对应且规格相匹配,气囊的内部添加有氮气,触杆与定位环滑动连接,触杆与触点的位置相对应且规格相匹配,顶板与定位环的位置相对应且规格相匹配。
12.优选的,所述按钮的数量为两个,两个按钮均与外部电源电连接,触点与按钮电连接,触点与电机电连接,线圈与按钮电连接,线圈、电机均与外部电源电连接,触点触发,电流由通路变成断路,进而使得外部电源停止给电机供电。
13.有益效果
14.1、该手术室护理患者肢体固定架,通过活动块医生简单便捷的实现调节杆一和调节杆二的多角度调节,同时在连杆一和连杆二形成连杆的死点机构将移动板与滑杆稳定的接触,有效的防止活动块的滑动造成病人肢体活动影响手术的事件发生,提高了角度调节机构的整体机构的可靠性。
15.2、该手术室护理患者肢体固定架,通过链轮转动使得定位环活动,进而实现病人肢体高效的固定,有效的降低了医生手术的作业难度和风险,同时气囊收缩带动触杆与触点接触和分离,进而实现定位环对病人肢体智能、科学、安全的紧固,有效的防止因为夹持不当造成手术的失败,提高手术的成功率和质量。
附图说明
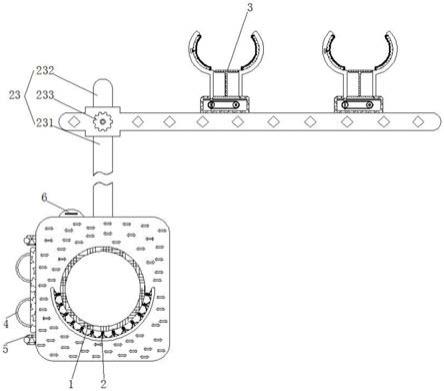
16.图1为本发明内部局部剖视结构示意图;
17.图2为本发明内部侧视结构示意图;
18.图3为本发明角度调节机构连接结构示意图;
19.图4为本发明图3中a处结构示意图;
20.图5为本发明固定机构连接结构示意图;
21.图6为本发明图5中b处结构示意图;
22.图7为本发明图5中c处结构示意图;
23.图8为本发明图5中d处结构示意图。
24.图中:1、滑杆;2、角度调节机构;21、活动块;22、定位组件;221、卡环;222、连杆一;223、连杆二;224、支撑杆;225、移动板;226、摩擦球;227、铁板;228、弹性绳;229、线圈;23、伸长组件;231、调节杆一;232、调节杆二;233、螺杆;3、固定机构;301、安装壳;302、出口;303、电机;304、链轮;305、链条;306、传动块;307、导杆;308、往复块;309、限位杆;310、定位环;311、遮挡布;312、气囊;313、触杆;314、触点;315、顶板;4、提环;5、按钮;6、外部电源。
具体实施方式
25.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
26.实施例一:
27.请参阅图1
‑
4,一种手术室护理患者肢体固定架,包括滑杆1,滑杆1的外部活动连接有角度调节机构2,角度调节机构2包括活动块21、对活动块21进行紧固的定位组件22、用于固定架长度调节的伸长组件23,活动块21滑动连接在滑杆1的外部,定位组件22活动连接在活动块21的外部,伸长组件23活动连接在活动块21的外部。
28.定位组件22包括卡环221,卡环221固定连接在活动块21的外部,卡环221的外部活动连接有连杆一222,连杆一222的外部活动连接有连杆二223,卡环221的外部固定连接有支撑杆224,支撑杆224的外部滑动连接有移动板225,移动板225外部固定连接有摩擦球226,移动板225的外部固定连接有铁板227,铁板227的外部固定连接有弹性绳228,支撑杆224的外部固定连接有线圈229。
29.伸长组件23包括调节杆一231,调节杆一231固定连接在活动块21的外部,调节杆一231的外部滑动连接有调节杆二232,调节杆二232的外部螺纹连接有螺杆233。
30.连杆二223的两端分别活动连接在连杆一222的外部和移动板225的外部,移动板225与活动块21的位置相对应且规格相匹配,摩擦球226与活动块21的位置相对应且规格相匹配,铁板227与线圈229的位置相对应且规格相匹配,弹性绳228的两端分别固定连接在铁板227的外部和支撑杆224的外部,螺杆233与调节杆一231的位置相对应且规格相匹配。
31.实施例二:
32.请参阅图5
‑
8,一种手术室护理患者肢体固定架,包括滑杆1,滑杆1的外部活动连接有角度调节机构2,角度调节机构2包括活动块21、对活动块21进行紧固的定位组件22、用于固定架长度调节的伸长组件23,活动块21滑动连接在滑杆1的外部,定位组件22活动连接在活动块21的外部,伸长组件23活动连接在活动块21的外部。
33.调节杆二232的外部活动连接有对病人肢体紧固定位的固定机构3,固定机构3包括安装壳301,安装壳301固定连接在调节杆二232的外部,安装壳301的表面开设有出口302,安装壳301的内部固定连接有电机303,安装壳301的内部活动连接有链轮304,链轮304的外部传动连接有链条305,链条305的外部活动连接有传动块306,安装壳301的内部固定
连接有导杆307,导杆307的外部滑动连接有往复块308,往复块308的外部固定连接有限位杆309,往复块308的外部固定连接有定位环310,定位环310的外部固定连接有遮挡布311,定位环310的内侧固定连接有气囊312,气囊312的内侧固定连接有触杆313,定位环310的内侧固定连接有触点314,安装壳301外部固定连接有顶板315。
34.电机303与链轮304固定连接,出口302与定位环310的位置相对应且规格相匹配,传动块306与限位杆309滑动连接,定位环310的数量为两个,一个定位环310的固定连接在往复块308的外部,另一个固定连接在安装壳301外部,两个定位环310的位置相对应且规格相匹配,遮挡布311的两端分别固定连接在定位环310的外部和出口302的内侧,遮挡布311用于防止液体进入安装壳301的内部,遮挡布311和出口302的位置相对应且规格相匹配,气囊312的内部添加有氮气,触杆313与定位环310滑动连接,触杆313与触点314的位置相对应且规格相匹配,顶板315与定位环310的位置相对应且规格相匹配。
35.实施例三:
36.请参阅图1
‑
8,一种手术室护理患者肢体固定架,包括滑杆1,滑杆1的外部活动连接有角度调节机构2,角度调节机构2包括活动块21、对活动块21进行紧固的定位组件22、用于固定架长度调节的伸长组件23,活动块21滑动连接在滑杆1的外部,定位组件22活动连接在活动块21的外部,伸长组件23活动连接在活动块21的外部。
37.定位组件22包括卡环221,卡环221固定连接在活动块21的外部,卡环221的外部活动连接有连杆一222,连杆一222的外部活动连接有连杆二223,卡环221的外部固定连接有支撑杆224,支撑杆224的外部滑动连接有移动板225,移动板225外部固定连接有摩擦球226,移动板225的外部固定连接有铁板227,铁板227的外部固定连接有弹性绳228,支撑杆224的外部固定连接有线圈229。
38.伸长组件23包括调节杆一231,调节杆一231固定连接在活动块21的外部,调节杆一231的外部滑动连接有调节杆二232,调节杆二232的外部螺纹连接有螺杆233。
39.调节杆二232的外部活动连接有对病人肢体紧固定位的固定机构3,固定机构3包括安装壳301,安装壳301固定连接在调节杆二232的外部,安装壳301的表面开设有出口302,安装壳301的内部固定连接有电机303,安装壳301的内部活动连接有链轮304,链轮304的外部传动连接有链条305,链条305的外部活动连接有传动块306,安装壳301的内部固定连接有导杆307,导杆307的外部滑动连接有往复块308,往复块308的外部固定连接有限位杆309,往复块308的外部固定连接有定位环310,定位环310的外部固定连接有遮挡布311,定位环310的内侧固定连接有气囊312,气囊312的内侧固定连接有触杆313,定位环310的内侧固定连接有触点314,安装壳301外部固定连接有顶板315。
40.活动块21的外部固定连接有提环4,活动块21的外部固定连接有按钮5,活动块21的外部固定连接有外部电源6。
41.连杆二223的两端分别活动连接在连杆一222的外部和移动板225的外部,移动板225与活动块21的位置相对应且规格相匹配,摩擦球226与活动块21的位置相对应且规格相匹配,铁板227与线圈229的位置相对应且规格相匹配,弹性绳228的两端分别固定连接在铁板227的外部和支撑杆224的外部,螺杆233与调节杆一231的位置相对应且规格相匹配。
42.电机303与链轮304固定连接,出口302与定位环310的位置相对应且规格相匹配,传动块306与限位杆309滑动连接,定位环310的数量为两个,一个定位环310的固定连接在
往复块308的外部,另一个固定连接在安装壳301外部,两个定位环310的位置相对应且规格相匹配,遮挡布311的两端分别固定连接在定位环310的外部和出口302的内侧,遮挡布311用于防止液体进入安装壳301的内部,遮挡布311和出口302的位置相对应且规格相匹配,气囊312的内部添加有氮气,触杆313与定位环310滑动连接,触杆313与触点314的位置相对应且规格相匹配,顶板315与定位环310的位置相对应且规格相匹配。
43.按钮5的数量为两个,两个按钮5均与外部电源6电连接,触点314与按钮5电连接,触点314与电机303电连接,线圈229与按钮5电连接,线圈229、电机303均与外部电源6电连接,触点314触发,电流由通路变成断路,进而使得外部电源6停止给电机303供电。
44.本装置开始启用,医生手动操作提环4带动活动块21转动将角度调节机构2调整至合适的位置,同时按下按钮5,进而外部电源6给线圈229通电,线圈229通电产生电磁场,铁板227在电磁场的磁场力的吸引作用下运动,铁板227运动使得弹性绳228伸长,铁板227运动带动移动板225在支撑杆224的外部滑动,移动板225滑动带动连杆二223转动,连杆二223转动带动连杆一222转动,当连杆一222和连杆二223转动为一条直线形成连杆的死点机构,同时移动板225带动摩擦球226与滑杆1接触并将活动块21紧固在滑杆1的外部,医生手动移动调节杆二232在调节杆一231的外部滑动至手术需要的位置并通过螺杆233固定。
45.当角度调节机构2的位置调整完成后,医生将病人的肢体放置在顶板315的外部,同时按下按钮5,进而外部电源6给电机303通电,电机303通电运行带动链轮304转动,链轮304转动带动链条305转动,链条305转动带动传动块306在限位杆309的内部滑动,传动块306滑动带动限位杆309运动,限位杆309运动带动往复块308在导杆307的外部滑动,往复块308滑动带动定位环310在出口302的内侧沿着右侧移动,定位环310滑动使得遮挡布311收卷,定位环310滑动带动触点314运动,定位环310运动带动气囊312运动,气囊312运动将病人肢体逐渐紧固,随着病人的肢体不断紧固并使得气囊312收缩,气囊312收缩使得触杆313在定位环310的外部滑动,触杆313滑动直至与触点314接触,进而外部电源6停止给电机303通电。
46.当手术结束,医生再次按下按钮5,同理外部电源6停止给线圈229通电,同理移动板225在弹性绳228的回复力的作用下回到初始位置。
47.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1