一种基于张拉整体结构的仿生膝关节结构及控制方法设计
1.本发明涉及张拉整体结构、膝关节仿生学、仿生结构领域,涉及一种基于张拉整体结构的仿生膝关节结构及控制方法设计。
背景技术:
2.张拉整体结构具有的形态可调性、受力可控性以及绳索抗拉性和结构轻质性等特点在仿生学领域有着重要作用。在康复训练过程中,由于中风引起下肢偏瘫、肢体运动不协调等症状使得人体下肢关节尤其是膝关节的康复训练活动变得至关重要。人体膝关节由许多骨骼、肌肉和韧带组成,所以膝关节可以被视为刚柔耦合结构。因此,从仿生学角度分析,不能简单地将膝关节结构映射到传统的刚性连杆结构中。另一方面从膝关节肌肉、韧带以及骨骼强耦合的特点可以利用具有刚柔耦合特性的张拉整体结构建仿生膝关节结构。
3.现阶段,基于人体下肢运动步态特点,一种膝关节康复机器人已经被设计出来,这种膝关节康复机器人采用刚柔耦合结构,作为一种无源外骨骼康复机器人,它具有重量轻,工作效率和有源外骨骼康复机器人一样等特点。另外,基于仿生学原理,两种基于踝关节和膝关节的仿生结构已被研发。这两种仿生结构充分考虑了人体踝关节和膝关节的生理结构。在结构设计中,把人体膝、踝关节的骨骼视为张拉整体结构的杆结构,而关节组织中的肌肉、韧带等组织被视为张拉整体结构的绳结构。并且在结构设计过程中分析了张拉整体结构的运动学。但由于结构的复杂性,在设计这两种张拉整体仿生结构时并没有考虑张拉整体结构的动力学模型以及控制方法设计,另外这两种仿生结构并没有考虑在噪声条件比如机械结构误差、机械震动、部件间摩擦、反馈信号的噪声、外部静摩擦等因素下张拉整体仿生结构的运行情况。
4.综上所述,对基于仿生人体下肢关节动力学分析的仿生张拉整体结构的进一步研究是仿生下肢关节结构的关键环节。因此本发明提出了一种基于张拉整体结构的仿生膝关节结构。基于仿生学原理,把人体下肢膝关节视为一种刚柔耦合机构。张拉整体结构的杆结构可以被视为膝关节的骨骼,而膝关节中的肌肉、韧带等组织通常可以视为张拉整体结构的绳结构。另外考虑到膝关节髌骨及其附近的组织对膝关节的限位功能,利用二连杆结构在施加外力的情况下实现了仿生膝关节结构的限位功能。此外,分析了基于张拉整体结构的仿生膝关节结构的运动学和动力学模型。进一步,由于在康复过程中膝关节会产生力矩,所以在仿生膝关节结构设计中考虑了人体膝关节力矩在康复过程中对仿生膝关节动力学模型的影响。最后由于在仿生膝关节的运行过程中,噪声项比如机械结构误差、机械震动、部件间摩擦、反馈信号的噪声、外部静摩擦等因素是不可避免的,所以设计了一种具有抗噪性能的ntznn模型,并对仿生膝关节结构进行控制方法设计。并且验证了在ntznn模型中在添加噪声项比如机械结构误差、机械震动、部件间摩擦、反馈信号的噪声、外部静摩擦等因素后对仿生膝关节结构运行并不造成影响。
技术实现要素:
5.本发明涉及一种基于张拉整体结构的仿生膝关节结构及控制方法设计,在符合人体下肢膝关节仿生学原理的情况下,本发明的技术方案如下:
6.一种基于张拉整体结构的仿生膝关节结构及控制方法设计,所述膝关节仿生结构及其控制方法设计所包含内容如下:s1:基于仿生学原理,将人体膝关节在运动时承担不同功能的骨骼、肌肉和韧带简化为张拉整体结构的绳、杆结构。s2:基于s1中建立的基于张拉整体结构的仿生膝关节结构,分析仿生膝关节结构的运动学性质,其中包括几何结构、奇异构型以及工作区间。s3:根据人体膝关节运动时的限位功能,在对仿生膝关节结构施加外力的情况下,利用二连杆结构实现了仿生膝关节的限位功能。s4:考虑人体下肢在康复过程中,人体下肢在不同康复训练阶段能够产生不同的人体膝关节力矩,考虑了人体下肢产生的力矩对仿生膝关节结构动力学模型的影响。s5:分析仿生膝关节结构的动能、势能,完成了对该结构的动力学建模。s6:利用ntznn模型对仿生膝关节结构进行控制。
7.步骤s1具体过程为:s101:为了将膝关节以仿生学角度转化为张拉整体结构,需要将膝关节的骨骼、肌肉、韧带等复杂的组织简化为绳、杆结构以便于进行后续分析。根据人体下肢运动时的动作情况,将发挥功能基本相同的组织简化为同一绳、杆结构。s102:通过这种策略,将腘绳肌和胫骨前肌简化为一块肌肉。缝匠肌、半膜肌、股薄肌和半腱肌简化为一块肌肉。四头肌简化为一块肌肉。另外,腓肠肌可以看成是一块肌肉。至于骨骼,由于腓骨和胫骨的功能相似,它们被视为一块骨头。股骨可以视为一块骨头。除此之外,由于其特殊的限位功能,髌骨和邻近韧带等发挥相同功能的组织被简化为两个杆件。
8.步骤s2具体过程为:s201:将人体膝关节结构简化为一个四杆四绳的张拉整体结构。s202:所谓奇异构型是指结构的输入量和输出量之间发生退化的情况。s203:在本发明中,由于仿生膝关节存在限位功能,仿生膝关节结构在进行伸直运动时并不能达到理论的奇异构型。所以,本专利中仿生膝关节结构进行伸直运动时的奇异构型实际上与工作区间的上限相同,而仿生膝关节结构进行屈曲运动时的奇异构型理论上可以达到,然而在仿生膝关节结构的实际运动中达到奇异构型意味着仿生膝关节结构被完全压缩,当仿生膝关节结构持续这种状态时,可能会造成对仿生结构的破坏。所以这种情况应当被避免,并且在人体膝关节的实际运动中,膝关节的过度屈曲也会对膝关节造成损伤。s204:在设计张拉整体结构时,工作区间是一个很重要的指标,在本专利中,使用了adams软件对仿生膝关节结构进行了仿真。仿真表明,在外力的作用下,本专利涉及的一种基于张拉整体结构的仿生膝关节结构能够满足膝关节运动以及实现人体膝关节伸直运动时的限位功能。
9.步骤s3具体过程为:s301:由于人体膝关节的髌骨及其附近的韧带、肌肉等组织对膝关节有限位功能,
防止膝关节在运动时过度伸直,对人体造成伤害。所以为了体现仿生膝关节结构的仿生性能,在设计仿生膝关节结构时,膝关节的限位功能需要进行设计。s302:仿生膝关节结构采用两组二连杆机构,分别由一个转向机构和仿生髌骨前缘平面相连,当外力作用在连杆上时,由于外力作用,连杆向上运动,当与转向结构相连的连杆垂直于x轴时,连杆结构达到工作区间的上界无法继续运动,从而实现了对仿生膝关节施加外力时的限位功能。s303:在仿生膝关节结构中,包括转向结构以及与其相连的第一段连杆结构被视为简化后的髌骨结构。仿生膝关节结构在进行康复活动时,主要是由股骨以及腓骨、胫骨简化而来的杆结构和由肌肉简化而来的四根绳结构承担康复功能。所以为了尽量简化仿生髌骨结构但又需要确保仿生髌骨结构能够实现其主要的仿生功能,即在外力作用下能对仿生膝关节的伸直运动进行限位,所以将转向结构固定。同时从仿生学角度来看,髌骨及与髌骨功能相似的组织在运动中主要发挥两个生物功能。首先,它通过增加髌腱和髌骨的接触面积使压力在股骨上的分布范围更加广泛,另一方面,它通过在整个运动范围内产生股四头肌肌腱前向的位移从而辅助膝关节的伸直。然而,膝关节从完全伸直到完全屈曲,髌骨在股骨踝间大约滑动7cm。髌骨的运动范围相对于膝关节整个运动即从完全屈曲到完全伸直的范围来看相当微小。另一方面,髌骨前缘较粗糙,后缘较光滑,在膝关节运动时,髌骨前缘相对于股骨位移并不明显,主要作用是保护股四头肌腱。当膝关节运动时,髌骨相对于股四头肌腱的运动有被向外驱赶的倾向。综上所述,一方面为了简化仿生膝关节结构以便于建立动力学模型,另一方面为了确保髌骨的生理功能。所以将转动关节固定在仿生髌骨前缘平面上。
10.步骤s4具体过程为:人体下肢在康复训练过程中由于处于不同康复阶段能够产生不同大小的人体膝关节力矩τ
r
。例如在被动康复阶段,由于中风等疾病造成下肢偏瘫、肢体运动不协调以至于下肢无法按照病人意愿移动,在康复训练过程中人体会产生对抗康复训练轨迹的力矩,所以此时在康复训练过程中人体膝关节力矩τ
r
是一种对抗性力矩,在建立动力学模型的过程中可以设τ
r
为负值。另外存在一种完全被动康复阶段,这种情况对应患者中枢神经系统与下肢骨骼肌之间的神经传导功能基本丧失,也可以被认为是接受过下肢关节手术或全膝关节置换术的患者的被动康复阶段,此时人体膝关节力矩τ
r
十分微小。针对病人在康复训练阶段末期能够产生主动跟随康复训练轨迹的力矩的情况,此时人体膝关节力矩τ
r
在动力学模型中可以假设为正值。综上所述,在动力学模型建立过程中,人体膝关节力矩τ
r
都扮演着重要角色。所以人体膝关节力矩在系统动力学建模中应当被体现以表示人体产生的力对仿生膝关节结构运动时的影响。由于在不同康复阶段人体膝关节力矩大小基本一致,所以可以分阶段考虑人体膝关节力矩τ
r
。
11.步骤s5具体过程为:经过分析张拉整体结构的动能和势能后,得到拉格朗日方程,即:其中,k为动能,p为势能,f=[f1,f2]
t
为非保守力以及q=[θ,γ]
t
为广义坐标向
量。步骤s6具体过程为:s601:抗噪型归零误差动力学模型可通过下式来定义:s602:另外,ntznn模型表示方式如下:其中β,λ为系数,δ为时间间隔,ε(t)为噪声项。s603:在使用ntznn模型后,ε(t)在本专利中所提及的仿生膝关节结构中可以视为在康复过程中仿生膝关节结构遇到的噪声,噪声包含机械结构误差、机械震动、部件间摩擦、反馈信号的噪声、外部静摩擦等因素。附图声明图1为一种基于张拉整体结构的仿生膝关节结构的几何结构图;图2为人体膝关节在外力作用下负载与形变的关系图;图3为τ
r
=
‑
40时,θ角实际轨迹与期望轨迹之间的误差曲线;图4为τ
r
=
‑
40时,γ角实际轨迹与期望轨迹之间的误差曲线;图5为τ
r
=
‑
40时,实际轨迹与期望轨迹对比图;图6为τ
r
=40时,θ角实际轨迹与期望轨迹之间的误差曲线;图7为τ
r
=40时,γ角实际轨迹与期望轨迹之间的误差曲线;图8为τ
r
=40时,实际轨迹与期望轨迹对比图;图9为τ
r
=0时,θ角实际轨迹与期望轨迹之间的误差曲线;图10为τ
r
=0时,γ角实际轨迹与期望轨迹之间的误差曲线;图11为τ
r
=0时,实际轨迹与期望轨迹对比图。
具体实施方式
[0012]
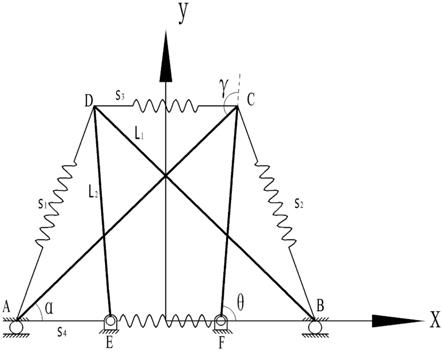
下面结合实施例和说明书附图对本发明作进一步说明:图1为一种基于张拉整体结构的仿生膝关节结构的几何结构图,如图1所示,所述结构具体如下:
[0013]
s1:仿生膝关节结构的几何结构具体如下:s101:仿生膝关节张拉整体结构由四根杆和四组绳结构组成。在仿生膝关节结构中,杆ac和bd可以视为分别由股骨以及胫骨、腓骨简化而来的骨骼结构。杆cf和de可以视为是从髌骨和附近的组织中简化的具有相同功能的结构。对于二连杆机构,杆ac和杆cf的长度分别为l1和l2,其中l1大于l2。同样地,另一组二连杆机构bd
‑
de与二连杆结构ac
‑
cf关于y轴轴对称,所以二者的几何结构完全相同。值得注意的是,两组二连杆机构并没有接触,所以两组连杆机构在运动时并不会互相干扰。s102:对于四组绳结构,初始长度s
0i
,(i=1,2,3,4)不等于0,这是因为在人体下肢关节不发生运动时,人体肌肉、韧带存在一定初始长度从而保持人体下肢结构的稳定性。在本专利中,k1、s1和s
01
分别等于k2、s2和s
02
。s
04
的初始长度大于s
03
。与杆相比,绳的刚度k
i
,(i
=1,2,3,4)是无穷小的。s103:节点a和b可以沿x轴无摩擦左右平移,而节点e和f作为转动关节固定仿生髌骨前缘平面上。节点e、f距离参考坐标系原点的距离均为l3。图2为人体膝关节在外力作用下负载与形变的关系图,如图2所示,所述结构具体如下:
[0014]
s2:人体膝关节在外力作用下负载与形变的关系具体如下:图2表示了人体膝关节在运动时,肌肉相对于外部载荷的形变关系。因此为了体现仿生膝关节结构的仿生性能,在弹性范围阶段,应在模型设计中考虑一种与弹簧阻尼系数类似的肌肉粘弹性特质。
[0015]
s3:在外力作用下,仿生膝关节结构中c、d点的工作区间具体如下:在adams动力学仿真中仿生膝关节结构在施加在c、d两点外力的作用下形成了c、d点运动轨迹。仿真结果表明,在模拟膝关节伸直运动时,即施加方向向上并且垂直于x轴的外力在c、d两点,当cf、de两杆完全垂直于x轴时,结构被锁定,无法继续运动。由此,可以看到仿生膝关节结构由平衡位置即初始位置在外力的作用下,杆cf、de向上旋转,当cf、de垂直于x轴时,即工作区间的上界。由于连杆结构在外力作用下的限位功能,连杆结构不能继续运动,实现了膝关节机构在膝关节伸直运动时的限位功能。
[0016]
s4:人体膝关节力矩对张拉整体结构的影响及其处理方法如下:在人体下肢康复过程中,当人体下肢在不同康复阶段会产生不同大小的人体膝关节力矩。例如在被动康复阶段,由于中风等疾病造成下肢偏瘫、肢体运动不协调以至于下肢无法按照病人意愿移动,在康复训练过程中人体会产生对抗康复训练轨迹的力矩,所以此时在康复训练过程中人体膝关节力矩τ
r
是一种对抗性力矩,在建立动力学模型的过程中可以设τ
r
为负值。另外存在一种完全被动康复阶段,这种情况对应患者中枢神经系统与下肢骨骼肌之间的神经传导功能基本丧失,也可以被认为是接受过下肢关节手术或全膝关节置换术的患者的被动康复阶段,此时人体膝关节力矩τ
r
十分微小,所以τ
r
在数值上可以取0。针对病人在康复训练阶段末期能够产生主动跟随康复训练轨迹的力矩的情况,此时人体膝关节力矩τ
r
在动力学模型中可以假设为正值。在建模过程中,这些力矩是不可忽视的。因此,在动力学模型中考虑了人体膝关节力矩τ
r
,人体膝关节力矩τ
r
可以被视为常数,因为在相同的康复阶段,下肢产生的力矩大致相同。因此,τ
r
=[ω,ω]
t
,其中ω是一个常数。
[0017]
s5:基于张拉整体结构的仿生膝关节结构动力学建模如下:在仿生膝关节的动力学方程建模过程中,为了分析系统的动能以及势能,使用拉格朗日方程建模,具体如下:其中,k为动能,p为势能,f为非保守力向量以及q=[θ,γ]
t
为广义坐标向量。特别地,由于本专利所提及的一种基于张拉整体结构的仿生膝关节结构为二自由度结构。所以,系统的广义坐标可以选取为:θ,γ,有q=[θ,γ]
t
。s501:在本专利中,系统的动能是由于杆的运动引起的。所以,仿生膝关节结构的动能为:
其中m1和m2分别是杆l1以及杆l2的质量。s502:系统的势能为:其中,α=θ+γ
‑
π。s503:非保守力向量f的表示方式为:s503:非保守力向量f的表示方式为:其中,c
i
,i=(1,2,3,4)为弹簧的阻尼系数,其中c1=c2=c3=c4,弹簧的阻尼系数相等可以理解为人体膝关节附近的肌肉等组织在图2中所示的弹性范围内的系数大致相同。s504:因此,可以得到动力学模型的拉格朗日方程如下:其中u和τ
r
分别是控制力矩和人体膝关节力矩。c为非保守力向量有关联的矩阵,而矩阵t则与势能相关。s505:另外,矩阵m,h,g具体为:s505:另外,矩阵m,h,g具体为:s505:另外,矩阵m,h,g具体为:s505:另外,矩阵m,h,g具体为:
[0018]
s6:ntznn控制器具体形式如下:因为在模型中考虑了人体膝关节力矩τ
r
,并且在动力学建模时考虑了仿生膝关节结构在运行中会产生不可避免的噪声比如机械结构误差、机械震动、部件间摩擦、反馈信号的噪声、外部静摩擦等因素从而对动力学模型产生影响。所以具有抗噪性能的ntznn模型被考虑来设计仿生膝关节结构动力学模型的控制器。s601:非线性优化问题可以总结为:s602:目标函数对时间求导为:其中:s603:ntznn模型的误差函数可通过下式来定义:e(t)=0
‑
φ(y(t))s604:ntznn模型可通过下式定义:其中,β,λ为大于0的常系数,ε(t)为噪声项。从图3
‑
图11可以看到。人体膝关节力矩τ
r
分别选取
‑
40,40以及0,对应在病人康复训练阶段中可能经历的不同阶段,分别为被动康复阶段、主动康复阶段以及完全被动康复阶段。实验结果表明,在添加人体膝关节力矩τ
r
后,仿生膝关节结构的动力学模型虽然受到影响,但仍然能满足性能要求。另外,在仿生膝关节结构动力学模型的建立过程中,考虑了仿生膝关节结构在运行过程中可能产生的噪声比如机械结构误差、机械震动、部件间摩擦、反馈信号的噪声、外部静摩擦等因素。在使用ntznn模型作为控制器后,模型对实际轨迹的控制总是能及时跟踪康复训练轨迹,仍能达到预期误差要求。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1