改善人工晶状体屈光能力的新型空间柔性运放襻结构
1.本发明涉及医疗领域,具体涉及一种改善人工晶状体屈光能力的新型空间柔性运放襻结构。
背景技术:
2.晶状体是人眼中屈光介质之一,对光线有一定的曲折力,当晶状体发生病变时,需要进行白内障手术将晶状体取出,放入合适的人工晶状体来达到自身晶状体的作用,一个典型的人工晶状体通常由中间圆形的光学区和四周的支撑襻结构组成;目前存在多种类型人工晶状体,而其中应用最为广泛的可调节人工晶状体存在襻结构调节能力较小的不足,不能满足患者看远看近所需的屈光度要求,无法从根本上摆脱眼部疾病。
3.柔性铰链是一种具有支撑和传递功能的结构,体积小、便于加工,通过中间相对薄弱的部分,受力时会产生相对明显的弹性角变形,依靠柔性铰链的机械结构在变形运动中,具有无机械摩擦、无间隙、运动灵敏度高等特点,目前柔性铰的理念已逐步应用于人工晶状体的结构设计中。
4.传统的结构设计中是在人工晶状体的光学区和襻的连接处放置一个纤细的柔性铰链,与光学区成一定角度,使得光学区受到襻的挤压而前移,近些年来,在人工晶状体结构设计上的改进仅限于在襻上更换倾斜角度或增大受力面积,实现简单的位移放大,调节幅度偏小,远远无法达到术后的正常水平。
技术实现要素:
5.本发明所解决的技术问题可弥补晶状体光学区调节力的不足,提高晶状体的生理调节能力。发明人通过创新性地对人工晶状体支撑襻结构进行构思,替代传统的襻结构,设计了一种多级位移柔性运放襻结构来传递和放大力和位移,使得光学区受到新型空间柔性运放襻结构的挤压进而前移,由此增大人工晶状体的调节幅度。
6.在本发明中使用的“光学区”指的是位于人工晶状体光学部分中央的具有光学特性,同时可实现人工晶状体屈光度调节功能的部分。
7.在本发明中使用的“襻”指的是与人工晶状体光学区相连的部分,不仅可以起到支撑光学区的作用,而且又可以将睫状肌的收缩与舒张所产生的收缩力传递到所述光学区的结构。
8.技术方案如下:改善人工晶状体屈光能力的新型空间柔性运放襻结构,由两个反对称的单元组合而成,且结构内部杆件长度、宽度不等,运动方向完全对称;每个反对称的结构单元包括一个三级杠杆式放大机构和一个单级桥式放大机构;所述三级杠杆式放大机构包括第一级杠杆,第二级杠杆和第三级杠杆,所述第一级杠杆,第二级杠杆和第三级杠杆均为刚性杠杆且竖直设置,并与两个水平杠杆进行连接;所述单级桥式放大机构是一个与水平方向呈5
°
的刚性第四级杠杆;每个反对称结构单元的本体上设置有8个柔性铰链单体。
9.进一步,每个反对称的结构单元中,两个方向的初级输入端用于给所述机构输入位移,所述结构分别沿三级杠杆式放大机构和单级桥式放大机构的正向输出端产生水平输出位移和垂直输出位移。
10.进一步,所述第一级杠杆输入端和所述的第二级杠杆输入端与所述两侧输入固定端之间分别通过第三柔性铰链单体和第四柔性铰链单体连接;所述三级杠杆式放大机构的所述第一级杠杆输出端与所述第三级杠杆输入端通过第五柔性铰链单体和第六柔性铰链单体连接;所述三级杠杆式放大机构的所述第二级杠杆输出端与所述第三级杠杆输入端通过第七柔性铰链单体和第八柔性铰链单体连接。
11.进一步,所述两个反对称的结构单元分别设置在对称两侧。
12.进一步,所述第一级杠杆输入端通过两个柔性铰链单体,与所述另一反对称结构单元的第二级杠杆输入端固定连接。
13.进一步,所述单级桥式放大机构输入端与所述三级杠杆式放大机构水平输出端固定连接,所述单级桥式放大机构输出端侧与主结构平面成5
°
的倾斜角,可获得较大的输出位移。
14.进一步,所述第三级杠杆输出端为杠杆式放大机构的输出端,所述第四级杠杆输出端为桥式放大机构的输出端,为所述结构的整体输出位移端。
15.进一步,所述第三柔性铰链、第四柔性铰链、第五柔性铰链、第六柔性铰链、第七柔性铰链及第八柔性铰链与所述两个输入固定端的长度方向垂直,所述第一柔性铰链、第二柔性铰链与所述输入固定端的长度方向平行。
16.进一步,所述的反对称三级杠杆式放大机构和单级桥式放大机构以及八个柔性铰链单体组成了一种一体成型的框架结构。
17.进一步,所述第一级杠杆、所述第二级杠杆、所述第三级杠杆的方向相互平行,同时与所述第四级杠杆的方向垂直。
18.本发明的优点和有益效果在于:1、目前临床上应用较多的tetraflex型人工晶状体采用平面四触角设计,表现为一个方形的闭合襻结构,与光学区成5
°
角,主要通过襻结构自身的弹性,将位移均匀的传递到光学区,致使光学区向前向后移动完成晶状体屈光力的调节,但远远无法达到术后人眼所需的正常视力要求。本发明在不改变人工晶状体构型的的前提下,采用柔性铰链设计了一种多级组合叠加的新型空间柔性运放襻结构,以不同的相互连接关系替代传统的单一襻结构,加强了该结构的稳定性;由于该结构采用反对称的布置方式,很大程度上避免了对称布置方式中放大效果无效占用的空间,减少了位移的损失,大幅度缩小了襻结构的体积,使得本结构更加紧凑;在稳定工作的状态下,将四个对称布置的输入端作为该结构的驱动端口给定输入位移,在保证该结构的输入输出位移保持线性关系的同时提高了其固有频率,改善了其动态性能,最终实现本结构的静动态特性的提高。
19.2、本发明采用杠杆机构、桥式机构以及柔性铰链进行设计,可极大地提高本结构的操作空间、放大率,杠杆式三级放大机构保证了输入位移输出位移间的线性关系,实现了水平方向横向位移的输出,单级桥式放大机构扩大了该结构的位移移动范围,提高了输出端在垂直方向的正向前置位移,即形成纵向位移的输出,实现了在人眼晶状体囊袋小空间内的大变形,扩大了人工晶状体屈光度的变化幅度,恢复人眼全程视力,因此,本结构可以
放置在人眼囊袋的内部,是一种符合人眼构型以及调节需求的全柔性空间多级位移机构。
20.3、本发明中将输入位移传递给两组单级桥式机构,由于两杆件有足够的刚度且与水平面成一定角度,随着位移的放大,单级桥式机构的角度会随之发生变化,实现在空间结构中对人工晶状体光学区一定强度的挤压和固定,改善了传统襻结构仅在平面空间调节的局限性,实现了在三维空间中人工晶状体屈光能力的调节。
附图说明
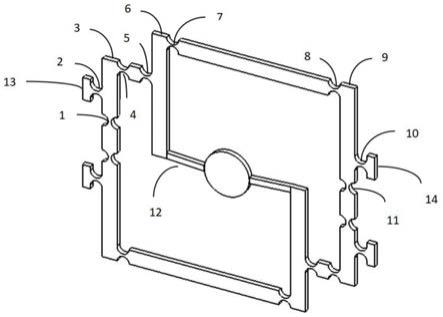
21.图1 为本发明的结构图。
22.具体实施方式
23.下面结合附图对本发明进一步说明:如图1所示,本发明涉及改善人工晶状体屈光能力的新型空间柔性运放襻结构,包括两个反对称的单元,每个反对称的结构单元包括一个三级杠杆式放大机构和一个单级桥式放大机构;所述三级杠杆式放大机构由三个垂直的刚性杠杆组成,分别命名为第一级杠杆3,第二级杠杆9和第三级杠杆6,并与两个水平杠杆进行连接;所述单级桥式放大机构是一个与水平方向呈5
°
的刚性第四级杠杆12;每个反对称结构单元的本体上设置有8个柔性铰链单体。
24.单个反对称的结构单元中包括两个方向的输入固定端用于给所述机构输入位移,所述结构分别沿三级杠杆式放大机构和单级桥式放大机构的正向输出端产生水平输出位移和垂直输出位移。
25.第一级杠杆3输入端和所述的第二级杠杆9输入端与所述两侧输入固定端13、14之间分别通过第三柔性铰链2、第四柔性铰链10连接;所述三级杠杆式放大机构的所述第一级杠杆3输出端与所述第三级杠杆6输入端通过第五柔性铰链4、第六柔性铰链5连接;所述三级杠杆式放大机构的所述第二级杠杆9输出端与所述第三级杠杆6输入端通过第七柔性铰链8、第八柔性铰链7连接。
26.两个反对称的结构单元以中心对称的形式进行设置,实现位移方向的转变和放大,所述第一级杠杆3输入端通过第一柔性铰链1与另一反对称结构单元中的第二柔性铰链11,与所述另一反对称结构单元的第二级杠杆9输入端固定连接。
27.单级桥式放大机构输入端与三级杠杆式放大机构水平输出端固定连接,单级桥式放大机构输出端侧与主结构平面成5
°
的倾斜角。
28.第三柔性铰链2、第四柔性铰链10、第五柔性铰链4、第六柔性铰链5、第七柔性铰链8及第八柔性铰链7与两个输入固定端的长度方向垂直,第一柔性铰链1、第二柔性铰链11与输入固定端13、14的长度方向平行。
29.反对称三级杠杆式放大机构和单级桥式放大机构以及八个柔性铰链单体组成了一种一体成型的框架结构。
30.第一级杠杆3、第二级杠杆9、第三级杠杆6的方向相互平行,同时与第四级杠杆12的方向垂直。
31.本发明提出的新型空间柔性运放襻结构,补充传统人工晶状体光学区15部分在调
节力方面的不足,将人眼睫状肌的收缩作为整个襻结构的输入位移,通过所述新型空间柔性运放襻结构充分传递到人工晶状体的光学区15,实现光学区15的凹凸度变化,由此提供调节。整个机构由四组输入端口驱动完成,由于该机构的运动方向完全对称,取1/2机构即上半部分机构进行分析。两组输入固定端口13、14的输入位移分别作用到第三柔性铰链2和第四柔性铰链10上,柔性铰链发生弹性变形,使得第一级杠杆3绕第一柔性铰链1顺时针转动,第二级杠杆9绕第二柔性铰链11逆时针转动,将位移传递给第一级杠杆3以及第二级杠杆9的输入端。第一级杠杆3的输出端通过水平杠杆的刚体运动和第五柔性铰链4、第六柔性铰链5弹性变形、将位移传递到第三级杠杆6,同样地,第二级杠杆9的输出端通过水平杠杆的刚体运动以及第七柔性铰链8、第八柔性铰链7将位移传递到第三级杠杆6,第三级杠杆6在两个方向位移的驱动下产生水平方向的旋转,即表现为第三级杠杆6绕第六柔性铰链5以及第八柔性铰链7逆时针转动,实现第三级杠杆6沿水平方向输出位移用于挤压人工晶状体的光学区15赤道部,改变人工晶状体光学区15的直径。在第三级杠杆6的下端输出位移的驱动下,第四级杠杆12输出端沿垂直方向输出前置位移,推动光学区15向前移动。现有的襻结构对人工晶状体的调节幅度最大仅有+3.5d,无法达到术后所需的正常生理水平,基于杠杆机构与桥式机构反对称组合设计的襻结构,接收、传递与晶状体囊膜连接的输入位移并放大输出,很大程度上扩大了屈光范围,因而,该新型空间柔性运放襻结构可将小输入位移实现人工晶状体屈光度的大幅度调节。
32.本发明的技术方案不限于上述具体实施例的限制,凡是根据本发明的技术方案做出的技术变形,均落入本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1