一种基于肌电信号的足下垂患者康复训练机器人
1.本发明涉及机器人领域,具体涉及一种基于肌电信号规律的用于辅助足下垂患者进行康复并实现正常行走的可穿戴外骨骼康复机器人。
背景技术:
2.外骨骼康复机器人可以辅助足下垂患者进行一系列的康复运动,患者能够与其相互合作。在康复机器人的带动下,辅助患者完成所需的运动,从而实现外骨骼康复机器人协助足下垂患者进行康复训练和实现正常行走的目的。
3.足下垂是现代社会中常见的疾病类型之一,按其病理类型来分,可分为先天性足下垂、创伤性足下垂以及神经源性足下垂。其中,先天性足下垂在早期可通过按摩的手法进行矫正,也可以通过手术来纠正畸形。创伤性足下垂是踝部发生创伤后导致的,或者是脑中风、偏瘫、外伤等原因导致的。神经源性足下垂是由于坐骨神经、腓总神经损伤导致的,由于神经系统具有重塑性,倘若足下垂患者在患病早期能够得到及时地治疗,就有很大的希望摆脱足下垂疾病的困扰。足下垂患者在行走时呈“画圈步态”,步态的异常较明显,对其身心健康造成了一定的伤害。由于足下垂患者的患肢无法进行较长时间的活动,会导致足背伸肌群无力,易造成病情的加重,所以,及早进行治疗和康复训练很重要。
4.迄今为止,用于足下垂康复训练的方式主要有传统的护理人员协助康复训练法、功能性电刺激法和应用外骨骼康复机器人的康复训练法。由于护理人员与足下垂患者之间的比例是失调的,采用护理人员协助康复训练法会加大护理人员的劳动强度,且此康复模式不能够精确记录与控制患者的运动轨迹、速度、强度等参数,会造成患者患肢的运动角度、运动位置等达不到所需标准,在病人恢复健康的过程中会产生不利的影响。功能性电刺激法利用低频脉冲电流来刺激肌肉进行运动,若长时间内使用此法,会造成患者的肌肉疲劳,存在二次伤害的风险。应用外骨骼康复机器人的康复训练法是人体在外骨骼的牵引下按照一定的轨迹进行运动,根据人体患肢的运动机理来布置传感器模块,外骨骼的运动参数容易获取,方便康复医师对患者的康复程度做出评估与后续外骨骼带动人体运动的参数修改。
5.对足下垂的康复治疗已成为康复医学界的焦点之一,结合以上所述内容,为更好地对足下垂患者进行康复训练,优选外骨骼康复机器人康复训练法,与之相关的文献有《可穿戴三自由度踝足运动康复外骨骼系统研究与开发》,该文献中外骨骼的运动是依靠足底力传感器检测患者的步态,利用控制系统实现对外骨骼位置的调控,但是此类导航信号不能够将信息及时地反馈给控制系统,无法预测患者的运动意图。文献《外骨骼康复机器人联合lokomat下肢康复机器人对脑卒中患者步行功能的疗效》是利用患者步行时小腿的倾斜角度或者足底压力的变化来启动装置,进而控制电脉冲传输至腓总神经,进行电刺激,这种方法容易使患者肌肉疲劳。故需采用一种能够预测足下垂患者运动意图的导航信号,及时、精确且安全地调控设备,辅助足下垂患者进行相应的运动。
技术实现要素:
6.本发明的目的是在外骨骼康复机器人的带动下,辅助足下垂患者进行康复训练并实现正常行走。
7.通过对足下垂患者进行肌电信号的测量后发现,患者大腿的肌电信号值与正常人接近,小腿前侧肌电信号值明显弱于正常人的小腿肌电信号值。由此可知,足下垂患者的大腿能够正常工作,基于人体大腿、小腿之间肌电信号的规律来预测患者的运动意图,通过患者大腿前侧肌电信号值,识别出人体进行背屈或者跖屈运动所需达到的位姿,控制机器人辅助患者完成预定动作的训练。
8.在人体进行背屈运动时,可将人体的脚部简化为需要被提起一定角度的物体,由此联想到卸煤装置,以此为出发点,进行助行机构的设计。
9.本发明提供一种基于肌电信号的辅助足下垂患者进行康复训练的机器人,其包括助行机构、传感模块和靴子;所述助行机构主要包括执行器主体板、脚部连接件以及驱动装置;所述执行器主体板设置在所述脚部连接件的后端部,所述执行器主体板与所述脚部连接件之间借助于第一连接轴进行铰接,所述执行器主体板能够相对于脚部连接件进行转动,使得执行器主体板的位型能够与人体小腿表面相一致,所述脚部连接件同样能够进行转动;所述传感模块包括肌电传感器以及底板;所述靴子设置在所述助行机构外部,对助行机构进行支撑及装饰;
10.所述执行器主体板的正面上部两侧固定有供索丝经过的支撑装置,所述支撑装置的上方固定有用于魔术贴连接的第一连接装置,所述魔术贴缠绕于小腿一圈后两端进行粘合,所述支撑装置的下方安装有第二连接轴,所述第二连接轴的一端借助于联轴器连接电机,所述电机安装在电机支架上,所述电机支架借助于支架板固定在所述执行器主体板的侧部,所述第二连接轴上粘固有两个绕线筒,所述绕线筒上缠绕所述索丝,索丝的端部通过支撑装置后缠绕在螺栓上,螺栓与脚部连接件的第二连接装置上的螺纹孔进行预紧固定;
11.所述执行器主体板中间位置处的左右两侧均固定有一对轴承支撑座,所述执行器主体板的下方左右两侧各固定有一处轴承支撑座,第一轴承装配于执行器主体板下方的一对轴承支撑座处,所述第一连接轴与所述第一轴承配合,实现所述第一连接轴在执行器主体板上的连接,所述第一连接轴与所述脚部连接件上的第三连接装置连接,完成执行器主体板与脚部连接件的铰接,为限制第一连接轴的轴向移动,在第一轴承外侧安装有卡簧。所述第二轴承装配于执行器主体板中间位置左右两侧的两对轴承支撑座处,所述第二连接轴与所述第二轴承配合,实现所述第二连接轴在执行器主体板上的连接,为限制第二连接轴的轴向移动,在第二轴承外侧安装有卡簧。绕线筒粘固于第二连接轴上且处于一对轴承支撑座中间位置处;
12.所述执行器主体板的背面粘固有可调压电源模块以及执行器驱动板,所述可调压电源模块安装于所述执行器驱动板的上方位置处;
13.在患者进行运动时,感知系统基于大腿前侧肌电信号值获取感知信号,并将获取的感知信号传输到控制系统中,进而形成相应的控制信号,控制系统对电机的驱动器发送控制信号,以此驱动电机的运行状态,电机带动第二连接轴进行转动,进而第二连接轴带动绕线筒转动,绕线筒带动索丝进行旋转运动,索丝通过支撑装置,拉动脚部连接件产生转动,从而带动患者脚部的运动;
14.所述电机正转时,经联轴器后,带动第二连接轴转动,第二连接轴的转动带动绕线筒上索丝的运动,索丝通过支撑装置经螺栓预紧后与脚部连接件固定连接,索丝的运动带动了脚部连接件的运动,在脚部连接件的带动下,完成背屈运动;由于患者的跖屈运动可靠其脚部自身的重力实现,助行机构借助人体控制力及电机的反转运动,使得绕线筒释放索丝,脚部连接件绕第一连接轴在矢状面内向下转动,完成跖屈运动。
15.优选地,所述调节板的形状与人体脚后跟形状一致,在调节板的两端开设有与螺栓配合的螺纹孔;所述脚部连接件上表面后侧的两边均固定有用于放置螺栓的倒t形轨道,所述倒t形轨道上开设有第一长方形槽体和第二长方形槽体,所述第一长方形槽体的宽度大于第二长方形槽体的宽度,所述第一长方形槽体的宽度小于螺栓头部直径且大于螺杆的直径,所述第二长方形槽体的宽度与螺栓的螺杆直径一致,螺栓通过调节板后经平垫圈与螺母相配合,松动螺母,移动螺栓的位置,螺栓的移动带动调节板在倒t形导轨上的移动,最后再拧紧螺母进行固定,实现调节板在脚部连接件的水平面内距离的调节,从而满足不同脚长的患者使用。
16.优选地,所述第一连接轴的两端借助于第一轴承进行固定,所述第二连接轴的两端借助于第二轴承进行固定。
17.优选地,为防止所述第一连接轴及第二连接轴产生轴向移动,在轴承的外侧安装卡簧,限制连接轴的轴向移动。
18.优选地,绕线筒端部的圆形薄板上开设有一螺纹孔,绕线筒缠绕有所述索丝,索丝的首端缠绕在所述螺钉的螺杆上,将缠绕着索丝的螺钉与螺纹孔相配合,对螺钉进行预紧,以此形成接线机构。
19.优选地,脚部连接件及执行器主体板均能够与人体脚形及腿形相适应。
20.优选地,根据不同患者的需求能够定制适合患者脚长的脚部连接件,从而能够减少调节板的设置并省去调节过程。
21.优选地,所述锂电池盛放于背包中,所述锂电池用于对所述电机及肌电传感器供电。
22.优选地,所述肌电传感器通过底板上的魔术贴穿戴于人体的大腿前侧位置处。
23.优选地,所述执行器主体板的中间位置两侧均固定有一对轴承支撑座,所述执行器主体板的正面下部左右两侧各固定有一个轴承支撑座,所述第一连接轴、第二连接轴分别借助于第一轴承、第二轴承安装于执行器主体板上,两个绕线筒分别粘固于第二连接轴和一对轴承支撑座之间。
24.优选地,所述脚部连接件的两侧中间位置固定有第二连接装置,第二连接装置上开设有螺纹孔,所述螺纹孔处安装所述螺栓,所述索丝的端部缠绕在所述螺栓上,通过垫片后与螺母进行紧固,以此实现在脚部连接件上的固定。
25.优选地,执行器驱动板、电源模块可粘固于执行器主体板的背面,肌电传感器粘固于底板上。
26.与现有技术相比,本发明的有益效果如下:
27.1、本发明与传统电机驱动的用于辅助足下垂患者行走的外骨骼康复机器人相比,利用索丝来驱动设备,辅助足下垂患者实现足部的背屈运动,具有一定的柔顺性,使用感更好,且本机构的结构简单,穿戴方便。
28.2、本发明利用人体行走时大腿与小腿之间存在的肌电信号规律做为机器人的导航信息,通过对足下垂患者大腿前侧肌电信号的分析,判断出该信号所对应的目标动作,进而对康复机器人的运动进行导航与调控。大腿前侧的肌电信号值能够及时地对系统进行反馈,保证运动时的精确性以及安全性。
29.3、本发明在感知系统的分析下,可以提前判断出患者的行走意识。克服了根据足底压力变化来启动装置的滞后性的缺点。
30.4、本发明为可调机构,能够根据患者的脚长调节出合适的位置,满足通用性的要求,便于批量生产。
31.5、本发明的助行机构可嵌入至靴子内,患者穿戴上外骨骼康复机器人后与普通人穿着靴子外观一样,有助于提升患者训练时的信心。本发明中电机固定于低位置处,重心较低,有助于患者行走时的稳定性。
附图说明
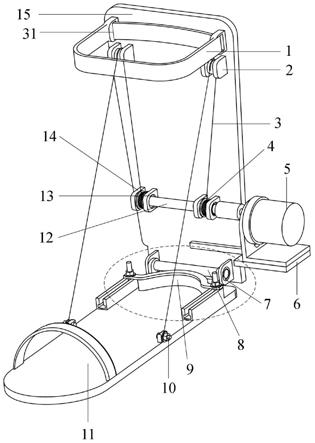
32.图1为本发明机构的前侧示意简图;
33.图2为本发明机构的后侧示意简图;
34.图3为本发明支撑装置示意简图;
35.图4为本发明卡簧对轴的轴向固定示意简图;
36.图5为本发明助行机构中的接线机构示意简图;
37.图6为本发明传感模块示意简图;
38.图7为本发明倒t形滑轨示意简图;
39.图8为本发明靴子及嵌入靴子内的助行机构示意简图;
40.图9为本发明绕线筒位置示意简图;
41.图10为本发明脚部连接件示意简图;
42.图11为本发明踝关节处力矩分析示意简图;
43.图12为本发明支架板示意简图。
具体实施方式
44.以下,参照附图对本发明的实施方式进行说明。
45.具体地,本发明提供一种基于肌电信号的用于调节足下垂患者患肢的外骨骼康复机器人,包括魔术贴1、支撑装置2、索丝3、绕线筒4、电机5、支架板6、第一轴承7、第一连接轴8、调节板9、螺栓10、脚部连接件11、第二连接轴12、第二轴承13、轴承支撑座14、执行器主体板15、可调压电源模块16、执行器驱动板17、螺母18、垫片19和电机支架20、联轴器21、螺钉22、肌电传感器23及其安装底板24、魔术贴25、螺栓26、螺母27、垫片28、卡簧29、靴子30、第一连接装置31。助行机构如图1和图2所示。图1中框选的部分如图7所示。传感器模块如图6所示。靴子及嵌入靴子内的助行机构可见图8。
46.执行器主体板15的正面上部固定有支撑装置2,用于支撑索丝3,支撑装置2的结构如图3所示,中间部分为圆柱体,两端部分为带圆角的薄片,可通过3d打印技术将支撑装置2打印或粘固于执行器主体板15上。在支撑装置2上方将第一连接装置31粘固于执行器主体板15上,第一连接装置31中间位置处开设了供魔术贴1穿过的连接口,魔术贴1的作用是调
节与固定人体小腿的位置。支撑装置2的下方设置有第二连接轴12,第二连接轴12与第二轴承13相配合,第二轴承13安装于轴承支撑座14,轴承支撑座14固定安装于执行器主体板15上。
47.如图4所示,在第二轴承的外侧安装有卡簧29。第二连接轴12的一端借助于联轴器21连接电机5,所述电机5借助于螺钉与电机支架20进行安装,所述电机支架20借助于支架板6固定在执行器主体板15的一个侧部。
48.如图12所示,支架板6呈叉形,支架板6通过粘合的方式,固定于执行器主体板15的缺口处。在第二连接轴12的下方,第一连接轴8与第一轴承7相配合,第一轴承7安装于轴承支撑座14,轴承支撑座14固定安装于执行器主体板15上,第一轴承7的外侧安装有卡簧29。
49.如图7及图10所示,执行器主体板15下端一对轴承支撑座14的圆孔与第三连接装置114的圆孔均通过第一轴承7与第一连接轴8进行配合,以此实现了执行器主体板15与脚部连接件11的铰链式连接。
50.如图9所示,第二连接轴12与两对轴承支撑座14之间分别设置有一个绕线筒4,绕线筒4粘固于第二连接轴12上。
51.如图5所示,绕线筒4一端的圆形薄板上开设有一螺纹孔41,绕线筒4的筒芯上缠绕有索丝3,索丝3的首端缠绕在螺钉22的螺杆上,将缠绕着索丝3的螺钉22与螺纹孔41进行预紧固定,形成接线机构。索丝的尾部通过支撑装置2后缠绕在螺栓10上,通过螺栓10与脚部连接件11上的第二连接装置111进行固定连接。
52.所述执行器主体板15的背面设置有可调压电源模块16、执行器驱动板17,所述可调压电源模块16粘固于所述执行器驱动板17的上方位置处;
53.执行器主体板15能够相对于脚部连接件11进行转动,使得执行器主体板15的位型能够与人体小腿的表面相一致,脚部连接件11也能够进行转动。脚部连接件11上设有第二连接装置111,第二连接装置111上设有螺纹孔112,索丝3的尾部缠绕于螺栓10上,螺栓10通过垫片19后经螺母18与螺纹孔112紧固,以此实现索丝3与脚部连接件11的固定连接。
54.每一轴承支撑座及连接装置上均有圆角,防止刮伤使用者的肢体。
55.调节板9的形状与人体脚后跟形状一致,在调节板9的两端开设有与螺栓26配合的螺纹孔;脚部连接件11上安装固定有用于放置螺栓26的倒t形轨道113,如图7及图10中的部件113所示,此轨道是在一个长方体上先开设了一个较宽的长方形槽体,用于放置螺栓的头部,宽度小于螺栓头部直径且大于螺杆的直径,然后在上表面又开设了一个较窄的长方形接口,宽度与螺栓的螺杆直径一致。将螺栓倒放,头部朝下,卡在较窄连接口的底部。螺栓26通过调节板9后与平垫圈28和螺母27相配合,松动螺母,在倒t形导轨上移动螺栓的位置,螺栓26带动调节板9在倒t形导轨上滑动,最后再拧紧螺母进行位置固定,以此实现调节板9在脚部连接件的水平面内距离的调节,从而满足不同脚长的患者使用。
56.其中,支撑装置2、轴承支撑座14、第一连接装置31、第二连接装置111、第三连接装置114、倒t形轨道113均可采用3d打印技术打印在执行器主体板15或脚部连接件11上,绕线筒4及调节板9也可采用3d打印技术制得,为减少索丝运动过程中在支撑装置2上产生滑移角的度数,优选尼龙材料进行3d打印。
57.外骨骼康复机器人的工作原理为,在控制系统的作用下,根据大腿前侧的肌电信号值,控制电机的正反转状态,电机5提供动力,电机5的转动通过联轴器21带动了第二连接
轴12进行旋转,在进行跖屈或背屈运动时,脚部相对于小腿需要转动一定的角度,根据索丝输出的长度为脚部连接件11提供旋转运动时脚部连接件11与脚部平放时的水平面之间的距离,由于索丝的应变率较低,所以在绕线筒4上缠绕适合患者进行跖屈与背屈运动所需圈数的索丝3。第二连接轴12带动绕线筒4共同进行旋转,绕线筒上的索丝3通过支撑装置2,最后经螺栓10与脚部连接件11上的第二连接装置111进行固定连接,拉动脚部连接件11进行运动,实现了脚部连接件11绕着以踝关节为基准的冠状轴进行旋转运动。具体地,在患者行走前,启动助行机构,电机5正转,带动第二连接轴12转动,由此带动索丝3运动,索丝通过支撑装置2后与脚部连接件11相连,动力传输至脚部连接件11上,从而使得脚部连接件11在矢状面内向上转动,人体完成背屈运动;由于患者的跖屈运动可靠其脚部自身的重力实现,助行机构配合人体控制力及电机5的反转,使得脚部连接件11绕第一连接轴8在矢状面内向下转动,完成跖屈运动。
58.对脚踝处的力矩分析可见图11,假设人群中人体足部最大质量为m1kg。靴子采用轻质材料制作,质量最大为m2kg,则需克服的总质量为(m1+m2)kg。将第一连接轴8看作支点处,第三连接装置114圆孔中心至螺纹孔112中心处的距离为力臂长度,长度为lm,此时的力矩m可通过如下计算进行求得:
59.f=(m1+m2)g
60.m=l
×
f=l
×
(m1+m2)g
61.为防止人体脚部及外骨骼康复机器人质量超出理论值而造成的负载,及考虑人体运动时动力学的需求,选择额定力矩超出m的电机,电机提供的力矩才可以满足足下垂患者的行走要求。
62.所述魔术贴1的作用是将执行器主体板15固定于人体小腿上。将调节板9调至患者感觉舒适的位置。
63.如图8所示,靴子30的侧面开设有一小孔301,调试完毕后,将脚部连接件11的底部粘固于靴子30的内鞋底上,防止助行机构与靴子30的脱离。然后通过小孔301,安装电机5,将电机5与联轴器21相连,通过螺钉固定电机在电机支架20上的位置。最后,在电机5位置处使用装饰件对电机进行装饰。当患者需要脱下时,直接松开魔术贴脱下靴子即可,需要再次穿上靴子时,仅调节魔术贴两端的粘连部位即可。
64.肌电传感器23粘固于底板24上,底板24两端设有连接口,用来固定魔术贴25,最后利用魔术贴25将底板24与使用者的大腿相贴合。
65.使用者在背包内盛放锂电池,锂电池对电机5和肌电传感器23进行供电。驱动板17上设立了驱动板电源的接口,通过导线与锂电池进行连接;另外驱动板17上还设立了控制信号输入接口,根据控制系统分析出的控制信号,向电机的驱动器发送信号,控制电机的正反转状态;驱动板17电源接口与其上方的电源模块16的接口连接,电源模块16的输出接口与肌电传感器23通过导线相连,利用电源模块16将驱动板17的输出电压调低至9v,保证肌电传感器的正常工作。
66.有关控制部分的原理为传感器将大腿前侧的肌电信息传输至感知系统,以此来检测患者当前的运动步态并预测患者的运动意图,形成感知信号,将感知信号传输到控制系统中,控制系统将检测出的感知信号转化成对应的控制信号,根据控制信号的参数对电机进行相应的控制,从而使得索丝带动脚部连接件进行转动。具体地,感知系统会将大腿前侧
的肌电信号值作为感知信号,然后将获取的感知信号传输到控制系统中,控制系统产生相应的控制信号,控制电机的工作状态,以此驱动助行机构产生所需的运动位姿。
67.优选地,通过电机的转动,来为机构的运行提供所需的力与力矩。
68.优选地,利用电源模块能够实现降压的优势,使得锂电池为肌电传感器供电。
69.优选地,将部分索丝缠绕于绕线筒上,使得患者能够获取运动所需的空间。
70.本发明基于人体行走时大腿、小腿之间产生的肌电信号规律,来导航外骨骼康复机器人的运动。由于足下垂患者的大腿能够正常工作,可以根据患者在行走时大腿前侧产生的肌电信号,分析患者当前运动状态以及预测运动意识,进而转化为控制信号,最后操作执行器,指导外骨骼康复机器人带动患者小腿的运动,辅助患者进行康复训练。以上所述的实施例仅是对本发明的优选实施方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1