可穿戴式骨折复位与康复机器人控制系统及控制方法
1.本发明属于机器人控制技术领域,特别涉及一种可穿戴式骨折复位与康复机器人的小型化控制系统及控制方法。
背景技术:
2.上世纪90年代中期,机器人技术开始被引入至骨科领域,因在提高手术精度、降低手术难度、减少手术伤害、减轻医师劳动强度等方面优势明显,骨科医疗机器人成为解决传统骨折复位手术和骨折康复临床难题的有效手段。其中,专利cn111685880a所述的可穿戴式骨折复位与康复一体化机器人因其结构紧凑,整体尺寸和质量小、刚度大、复位精度高,成为骨科医疗机器人的优势解决方案。
3.然而,由于骨科医疗领域对于可穿戴式骨折复位与康复机器人便携性和可靠性的高要求,现有可穿戴式骨折复位与康复机器人的控制系统仍然存在以下不足:1)开发难度大、成本高且难以满足小型化、便捷性要求。如专利cn106873401a所述的机器人控制系统,采用购置的运动控制卡作为主控制器来实现相应控制功能,控制成本高。控制器又需要适应电机驱动器的通信协议,增加了开发难度,同时这类运动控制系统体积较大、便捷性低。2)实时性、可靠性差。如专利cn106217376a所述的基于串行通信协议的机器人控制系统,这种rs485通信方式是以主站轮询的方式进行,系统实时性、可靠性差而且容易造成某些节点的“死链”现象。3)缺乏骨折复位与康复的一体化控制方法。如专利cn107970064a所述的骨折复位手术机器人系统,仅提出骨折复位轨迹控制方法,缺乏骨折康复阶段的控制方法。
技术实现要素:
4.本发明的目的在于克服现有技术的不足,提供一种可穿戴式骨折手术与康复机器人的控制系统及控制方法,更好地满足骨折复位手术和骨折康复的临床需求。
5.本发明的技术方案为:
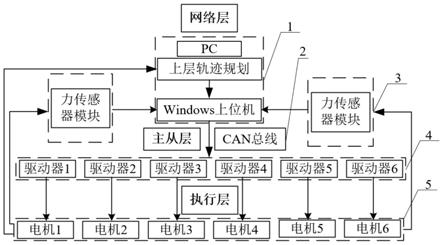
6.一种可穿戴式骨折手术与康复机器人的控制系统,包括网络层、主从层、以及执行层三个方面,所述网络层是指用于人机交互信息的上位机软件模块;所述主从层由通讯模块、力传感器模块、嵌入式驱动器模块组成,用于接收并执行上位机软件的控制命令;所述执行层是指为机器人运动提供扭矩的电机模块。
7.所述上位机软件模块用于人机信息交互,其内部嵌入机构运动学正逆解算法和轨迹规划算法。操作者通过所述上位机软件界面读取医生给定的轨迹和力传感器模块信息,控制机器人来辅助医生更好地进行骨折复位与康复。同时亦能实时采集机器人运动信息并记录,方便实现对患者康复的评估。
8.同时,所述上位机软件模块采用rs485串口通讯与usb转can总线通讯的多线程通讯方式。亦可实现嵌入式驱动器的硬件参数修改、机器人多种运动控制功能。
9.需要说明的是,所述上位机软件模块与所述嵌入式驱动器模块通过通讯模块进行连接。所述通讯模块为usb
‑
can总线转换器,通过ch340芯片将上位机usb指令转成串口指
令,最后将串口指令转换成can总线指令发送到所述嵌入式驱动器内部。可以简单方便地通过所述上位机软件模块监视can总线网络,同时可以实现机器人的双向通信。
10.所述嵌入式驱动器模块用于电机的运动控制及监控,主要包括硬件设计及应用程序设计。
11.所述嵌入式驱动器模块的硬件设计由控制电路和驱动电路组成。所述控制电路用于接收并解析外部控制指令,并发送电机控制信号到所述驱动电路;所述驱动电路用于接收所述电机控制信号,通过h桥电路对电机进行控制。所述嵌入式驱动器模块的硬件接口包括:电机传感器及驱动接口、驱动器电源接口、can总线通讯接口、串口通讯接口、电机电源接口、外部adc采集接口、程序下载接口。所述嵌入式驱动器模块将电源芯片、驱动芯片、通信芯片、控制芯片皆集成到同一控制电路板上,电路板面积小、集成度高。
12.所述嵌入式驱动器模块的应用程序设计由控制指令接收模块、控制算法模块、运动控制模块、控制指令发送模块组成。
13.所述控制指令接收模块接收所述上位机软件模块运动控制指令,触发对应中断至所述控制算法模块,底层控制交给所述运动控制模块,最后由所述控制指令发送模块将运行信息发送到所述上位机软件模块内部。
14.需要说明的是,所述控制指令接收模块及所述控制指令发送模块依据自定义通讯协议实现。控制指令包括电机转速控制、设定驱动芯片电流保护、单点位置控制、轨迹pvt控制、读取电机编码器信息、读取电机电流信息、读取flash表指定位、修改flash表指定位、flash表恢复默认值。控制帧包括普通模式控制帧与轨迹pvt模式控制帧。每帧控制信息包括帧头、帧尾、can总线id、控制模式标识、控制具体数据、校验码。
15.所述的控制算法模块包含分布式多轴协同控制方法及康复控制算法。所述的分布式多轴协同控制方法基于can总线广播与三次多项式插值轨迹控制算法实现。所述的康复控制算法由模糊导纳控制算法实现。
16.所述上位机软件模块及所述嵌入式驱动器模块均嵌入所述三次多项式插值轨迹控制算法,当所述嵌入式驱动器模块得到关键点pvt信息后,由于所述上位机软件模块计算的路径点比较稀疏,需要先对得到的一系列路径点做轨迹插补。轨迹插补由所述三次多项式插值轨迹控制算法实现,以保证电机运行平滑无冲击。
17.需要说明的是,上述的控制过程都是在机器人关节空间内完成,所述上位机软件模块规划完的离散点发送到固定数目的所述嵌入式驱动器模块内部之后,通过can总线的数据广播(设置公共can广播id,使启动指令能通过所述嵌入式驱动器模块的bxcan过滤器)来保证各个所述嵌入式驱动器模块同时接收到指令并启动。以此来保证各个所述嵌入式驱动器模块在一定意义上的指令同步,从而实现机器人的所述分布式多轴协同控制。
18.所述模糊导纳控制算法嵌入于所述嵌入式驱动器模块内部,通过建立模糊逻辑模型、导纳模型,再根据采集的力信息实时调整目标位置来顺应患者康复运动意图。
19.一种可穿戴式骨折手术与康复机器人的控制方法,包括以下步骤:
20.1)所述上位机软件模块界面输入位置控制指令;
21.2)所述上位机软件模块根据机器人机构逆解算法得到机器人各个支链的杆长并换算出对应的编码器脉冲值;
22.3)所述上位机软件模块向所述嵌入式驱动器模块传输控制指令;
23.4)所述嵌入式驱动器模块根据控制指令调整机器人从当前位姿运动到期望位姿。
24.所述嵌入式驱动器模块与所述上位机软件进行信息交互流程为:
25.1)所述嵌入式驱动器模块上电后,需要先对时钟模块、gpio模块、外部中断模块、定时器模块、adc模块、can控制器模块进行初始化;
26.2)初始化完成后,所述嵌入式驱动器模块等待can接收中断,每接收一个字节就会发生一次中断;根据嵌入的中断程序,满足接收条件时,将数据接收成功标志位置;
27.3)此时所述嵌入式驱动器模块关闭外部中断,解析具体的控制指令,打开定时器,进入对应的控制模式;
28.4)当指令执行结束后,开启外部中断,同时等待下一次的数据接收。
29.在can总线通讯上使用bxcan过滤器列表模式,通过提前设置好can报文id,在硬件上过滤掉不需要的信息。
30.本发明的有益效果是:
31.1、满足小型化、便捷性要求且开发难度和成本低:驱动器硬件设计集成度高,满足小型化、便捷性要求。同时其开发难度低,上位机通过简单的串口协议即可下发控制指令。
32.2、实时性高、可靠性好:驱动器为驱控一体设计,电机底层控制实时性高。同时驱动器之间采用can总线通讯,内部集成有可靠的错误处理和检错机制,同时具有传输距离较远、抗电磁干扰能力强的优点,其可靠性较好。
33.3、可实现骨折复位与康复一体化控制:在骨折复位阶段,控制系统可根据医师规划轨迹实现高精度骨折复位过程。在骨折康复阶段,控制系统可根据康复控制算法主动顺应患者运动,防止康复训练不当造成二次损伤。同时控制系统可实时采集并记录位置信息、力信息,能够方便实现对患者康复的评估。
附图说明
34.图1为机器人控制系统的结构框图;
35.图2为机器人位姿控制流程图;
36.图3为机器人上位机软件的结构框图;
37.图4为嵌入式驱动器模块接口图;
38.图5为嵌入式驱动器模块与上位机软件信息交互流程图;
39.图6为bxcan过滤器组中的相关寄存器说明表;
40.图7为普通模式控制帧信息表;
41.图8为轨迹pvt模式控制帧信息表;
42.图9为控制模式标识符信息表;
43.图10为轨迹离散点示意图;
44.图11为导纳控制模型框图;
45.附图标记:
46.1、上位机软件;2、通讯模块;3、力传感器模块;4、嵌入式驱动器模块;5、电机模块;6、多串口通讯功能;7、机器人运动控制功能;8、机器人运行信息采集功能;9、驱动器硬件参数修改功能。
具体实施方式
47.首先说明本发明实施例的应用场合,此控制系统用于可穿戴式骨折手术与康复机器人控制,主要通过对机器人支链的杆长调节实现机器人的位姿控制与力控制。以下结合附图实例对本发明作进一步详细描述,描述是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
48.如附图1所示,本发明的可穿戴式骨折复位与康复机器人控制系统结构主要包括网络层、主从层、以及执行层三个方面。
49.所述网络层是指用于人机交互信息的上位机软件1。所述主从层由通讯模块2、力传感器模块3、嵌入式驱动器模块4组成,用于接收并执行上位机软件1的控制命令。所述执行层是指为机器人运动提供扭矩的电机模块5。
50.需要说明的是,本发明所述控制系统为分布式控制系统,区别于集中式的控制系统,所述上位机软件1负责指令下发,实时控制由嵌入式驱动器模块4完成。
51.如附图2所示,机器人位姿控制流程如下:
52.1)所述上位机软件1界面输入位置控制指令;
53.2)所述上位机软件1根据机器人机构逆解算法得到机器人支链的杆长并换算出对应的编码器脉冲值;
54.3)所述上位机软件1向所述嵌入式驱动器模块4传输控制指令;
55.4)所述嵌入式驱动器模块4根据控制指令调整机器人从当前位姿运动到期望位姿。
56.所述上位机软件1基于qt和visio studio 2017开发,通过读取医生给定的轨迹以及力传感器信息,控制机器人来辅助医生更好的进行骨折复位与康复。同时亦能实时采集机器人的运动信息并记录,方便对患者的康复进行评估。
57.所述上位机软件1嵌入机器人机构运动学正逆解算法、轨迹规划算法,通过rs485模块与所述力传感器模块3进行通讯,同时通过usb转can模块与电机驱动器进行通讯。如附图3所示,所述上位机软件1的功能结构包括多串口通讯功能6、机器人运动控制功能7、机器人运行信息采集功能8和驱动器硬件参数修改功能9。
58.所述的多串口通讯功能6包括:1)电机驱动器通讯接口;2)力传感器通讯接口。所述机器人运动控制功能7包括:1)轨迹数据读取及控制;2)轨迹多项式插值点动控制;3)位置梯形加减速点动控制;4)机器人步进控制;5)电机匀速运行;所述机器人运行信息采集功能包括:1)电机位置、速度、电流信息采集2)力传感器信息采集。所述驱动器硬件参数修改功能包括:1)驱动器硬件参数读取2)驱动器硬件参数修改(pid参数、最大pwm参数、控制目标误差、梯形规划加减速度、返回信息协议选择、硬件版本号等的修改)。
59.所述嵌入式驱动器模块4的设计主要包括硬件设计及应用程序设计。所述硬件设计,主要由控制电路、驱动电路组成。所述控制电路主要功能是接收并解析外部控制指令,发送电机控制信号到所述驱动电路。所述驱动电路用于接收所述电机控制信号,通过h桥电路对电机进行控制。
60.具体的,所述控制电路采用stm32f405rgtx作为主控芯片,同时can总线收发器选用具高可靠性和高通讯速率的sn65hvd233
‑
q1芯片。所述驱动电路选用drv8876电机驱动芯片,具有集成电流检测和调节的功能。在启动期间和高负载事件中,集成电流检测可实现通
过驱动器调节电机电流。利用可调外部电压基准,可设置电流限制。
61.如附图4所示,所述嵌入式驱动器模块4主要包括:电机传感器及驱动接口、驱动器电源接口、can总线通讯接口、串口通讯接口、电机电源接口、外部adc采集接口、程序下载接口,以及复位按键、can总线id选择拨码开关、状态显示led。
62.具体的,所述的状态显示led用于更加直观的观测驱动器控制状态,红色led用于通电指示,绿色led用于电机运行状态指示。所述can总线id选择拨码开关用于决定对应驱动器在can总线的节点号,最大节点号为8。如需在总线上增加更多节点应在驱动器应用程序内部规定。
63.需要说明的是,所述嵌入式驱动器模块4将电源芯片、驱动芯片、通信芯片、控制芯片集成到同一控制板上,控制板面积小、集成度高。
64.如附图5所示,所述嵌入式驱动器模块4与所述上位机软件1进行信息交互流程为:1)所述嵌入式驱动器模块4上电后,需要先对时钟模块、gpio模块、外部中断模块、定时器模块、adc模块、can控制器模块进行初始化。2)初始化完成后,所述嵌入式驱动器模块4等待can接收中断,每接收一个字节就会发生一次中断。根据嵌入的中断程序,满足接收条件时,将数据接收成功标志位置1。3)此时所述嵌入式驱动器模块4关闭外部中断,解析具体的控制指令,打开定时器,进入对应的控制模式。4)当指令执行结束后,开启外部中断,同时等待下一次的数据接收。
65.在can总线通讯上使用bxcan过滤器列表模式,通过提前设置好can报文id,在硬件上过滤掉不需要的信息,从而大大提高了通讯效率。bxcan过滤器中,由2个32位寄存器:can_fxr1、can_fxr2组成。由于使用的是cube库,在cube库中,can_fxr1与can_fxr2寄存器分别被拆成两段,can_fxr1寄存器的高16位对应着上面代码中的filteridhigh,低16位对应着filteridlow,而can_fxr2寄存器的高16位对应着filtermaskidhigh,低16位对应着filtermaskidlow。
66.如附图6所示,通过设置fscx与fbmx的值,使得过滤器工作在16位宽的列表模式下,filteridhigh,filteridlow,filtermaskidhigh,filtermaskidlow这4个16位变量都用来存储一个标准can id,这样,就可以存放对应的驱动器特定id与数据广播id。
67.通讯协议规定每帧控制指令包括:帧头帧尾、控制模式标识符、can总线id标识符、控制具体数据标识符、校验码数据标识符。
68.如附图7所示,所述控制模式标识符包括:电机转速控制模式标识符、设定驱动芯片电流保护标识符、单点位置控制模式标识符、轨迹pvt控制模式标识符、读取电机编码器信息标识符、读取电机电流信息标识符、读取flash表指定位标识符、修改flash表指定位标识符、flash表恢复默认值标识符。
69.如附图8、9所示,普通模式每帧控制信息包括11个字符、轨迹pvt控制模式每帧控制信息包括16个字符。其中,起始字符为:“{”;第二个字符为can总线id标识符;第三个字符为控制模式标识符。在普通模式数据帧中,第4个标识符至第9个标识符为控制具体数据标识符、第10个标识符为校验码。在轨迹pvt控制模式数据帧中,第4个标识符为轨迹节点标号、第5个标识符至第14个标识符为控制具体数据标识符、第15个标识符为校验码。
70.需要说明的是,本发明提出的可穿戴式骨折复位与康复机器人的小型化控制系统为分布式控制系统,但上位机软件基于非实时性操作系统开发,无法保证毫秒级的实时性。
进一步,可穿戴式骨折复位与康复机器人为6自由度并联机构(见专利cn111685880a),需要多轴协同运动来实现末端位姿控制。为解决上述问题,提出了一种基于非实时性上位机系统的分布式多轴协同控制方法。
71.在多轴协同控制过程中,所述上位机软件1主要进行离线轨迹规划,规划完成后将关键点信息发送到所述嵌入式驱动器模块4内部。如附图10所示,上位机得到n+1个离散点后,由三次多项式插值算法不断拟合相邻离散点之间的运行曲线。其表达式为:
[0072][0073]
1)各个离散点位置方程,其表达式为:
[0074]
θ
i+1
=a
i
+b
i
δt+c
i
δt2+d
i
δt3(0≤δt≤t
i+1
‑
t
i
)
[0075]
2)速度加速度连续性方程,其表达式为:
[0076][0077]
3)起始点终止点速度约束方程,其表达式为:
[0078][0079]
进一步,方程组求解得到各个系数之后,赋予离散点速度、时间信息。当速度超出最大速度限制后,调整运行时间重新拟合曲线直到满足要求。最后将关键离散点pvt信息发送到各个所述嵌入式驱动器模块4内部。
[0080]
具体的,所述嵌入式驱动器模块4内部嵌入增量式双环pid控制算法,速度环控制周期是10ms,电流环控制周期是1ms。每次数据交换前,控制芯片需要将pwm值发送给驱动芯片,同时通过驱动芯片来读取当前的速度值、电流值。数据交换后,在下一次数据交换时间节点前,控制芯片需要基于读取的反馈值,迅速计算出下一次需要发送给驱动芯片的给定值,驱动芯片则需要根据控制芯片给定目标值完成相应动作。整个实时运算任务均由所述嵌入式驱动器模块4内部集成的控制芯片完成。
[0081]
当然,上述控制过程都是在机器人关节空间内完成,所述上位机软件1规划完的离散点发送到固定数目的所述嵌入式驱动器模块4内部之后,通过can总线的数据广播(设置公有can广播id,使启动指令能通过所述嵌入式驱动器模块4的bxcan过滤器)来保证各个所述嵌入式驱动器模块同时接收到指令并启动。以此来保证各个所述嵌入式驱动器模块4在一定意义上的指令同步,从而实现机器人的所述分布式多轴协同控制。
[0082]
进一步,所述嵌入式驱动器模块4内部嵌入有模糊导纳控制算法,以此实现患者主动康复阶段的控制,防止康复训练不当造成二次损伤。
[0083]
所述模糊导纳控制算法设计主要包括目标导纳模型、模糊控制器的设计。所述目标导纳模型为二阶质量
‑
弹簧
‑
阻尼模型,代表理想的机器人终端位置和机器人/环境作用力之间的动态关系。所述模糊控制器用以调整所述目标导纳模型的参数,用以满足同年龄段患者、不同康复阶段的要求。
[0084]
如附图11所示,整个所述模糊导纳控制内环为位置闭环,外环为导纳控制闭环。通过所述力传感器采集各轴的力信息,经由导纳模型得到目标位置值,把目标位置值输入到
内环位置控制器,以此实现不同导纳参数下末端轨迹的控制,从而使机器人的各个关节具备柔顺性,保存康复训练过程的安全性。
[0085]
以上对本发明的描述仅仅是示意性的,而不是限制性的,所以,本发明的实施方式并不局限于上述的具体实施方式。如果本领域的普通技术人员受其启示,在不脱离本发明宗旨和权利要求所保护范围的情况下,做出其他变化或变型,均属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1