一种医疗导航系统中测量膝关节间隙曲线的方法与流程
1.本发明涉及医疗器械领域,具体涉及一种医疗导航系统中测量膝关节间隙曲线的方法。
背景技术:
2.膝关节间隙的测量,为膝关节疼痛的诊断和治疗判断的准确性提供解剖学依据。传统的测量方法通过拍摄卧、立位膝关节前后x线片,在x线片上用分规测量股骨内、外髁最低点与胫骨平台关节面的垂直距离,从而得出膝关节内外侧间隙值。
3.传统测量方法依靠拍摄x线片然后医生通过分规手动测量容易产生误差,且拍摄一次x线片只能测量一个位姿下的间隙值,无法获取膝关节伸屈膝活动时,整个过程中膝关节间隙值的变化曲线。
技术实现要素:
4.本发明的目的在于克服传统膝关节间隙测量值不准确,无法实时获取膝关节活动过程中间隙值曲线等不足,本发明提供一种医疗导航系统中测量膝关节间隙曲线的方法,获取股骨和胫骨相对位置后,通过坐标系转换即可获取股骨切面和胫骨切面的相对位置,在基于ct数据建立的三维虚拟空间中,已知股骨和胫骨的切面数据,通过实时计算股骨远端以及后侧内外测量点到胫骨切面的垂直距离,即可得到不同屈膝角度下内外侧间隙值。将不同屈膝角度下采集的间隙值进行三次样条插值后进行可视化处理最终可以得出不同屈膝角度下的间隙值曲线。
5.为了达到上述技术目的,本发明的提供一种适用于追踪器测量膝关节间隙曲线的方法,包括如下步骤:
6.s100将三维定位装置和股骨追踪器固定,然后利用三维定位装置的数据探针采集股骨表面标记点进行配准,计算出股骨追踪器和股骨之间的转换关系,获得
7.s200将三维定位装置和胫骨追踪器固定,然后利用三维定位装置的数据探针采集胫骨表面标记点进行配准,计算出胫骨追踪器和胫骨之间的转换关系,获得
8.s300通过三维定位装置实时获取三维定位装置相对于股骨追踪器和胫骨追踪器的位置关系,通过坐标转换可计算出胫骨相对股骨的位置关系
9.s400将胫骨近端切面数据进行坐标转换乘以得到在股骨坐标系下的胫骨近端切面法向量normal
tibia
={p
x
,p
y
,p
z
},胫骨近端切面点original
tibia
={p
x
,p
y
,p
z
},通过股骨远端切面和股骨前侧斜切面数据计算出股骨远端内外侧测量点
通过股骨后侧切面和股骨后侧斜切面数据可计算出股骨后侧内外侧测量点在屈膝角≥45
°
时,计算股骨后侧内外侧测量点与胫骨近端切面的垂直距离内外侧测量点与胫骨近端切面的垂直距离在屈膝角<45
°
时,计算股骨远端内外侧测量点与胫骨近端切面的垂直距离量点与胫骨近端切面的垂直距离
10.s500活动膝关节使屈膝角从0
°
到90
°
缓慢变化,采集屈膝角度值和对应的内外侧间隙值;以屈膝角度值为x,内外侧间隙值为y,对采集数据进行三次样条插值得出更多的点数,对插值后的间隙值和屈膝角进行坐标转换即可绘制光滑的间隙值曲线。
11.其中追踪器工具分为两个部分,阵列固定器与安装夹具;阵列固定器根据三维定位装置对于标记阵列的要求进行设计,阵列固定器上的螺纹孔保证标记点都在同一平面上,且每个螺纹孔与阵列标记点所在平面垂直,这样的设计可以保证阵列坐标系的一个坐标轴与阵列标记点所在平面垂直,且通过阵列坐标系原点;安装夹具是阵列固定器与其他工具连接安装的中间件,连接了阵列固定器和杆状工具,杆状工具的轴线通过阵列坐标系原点,且与阵列坐标系的一个坐标轴平行。
12.本发明的医疗导航系统中测量膝关节间隙曲线的方法,有益效果如下:
13.1、本发明利用了三维定位装置以及追踪器可以实时获取股骨和胫骨的相对位置关系,进而在三维虚拟空间里计算出股骨测量点到胫骨切面的垂直距离,最终获取间隙值,该方法可以不限于该追踪器获取的股骨和胫骨位置关系,在其他系统中利用其他注册工具通过该方法计算间隙值亦在其保护范围亦在其保护范围;
14.2、本发明使用三次样条插值对实时采集的屈膝角和间隙值进行可视化处理,获取的点数更多,绘制出的间隙曲线更加平滑,与传统的测量一个位姿下间隙值相比更加直观的显示膝关节间隙值随屈膝角变化的趋势,利用其他方法绘制屈膝角和间隙值曲线亦在其保护范围内;
15.3、操作简单,在数据采集环节不需要人工进行精密地测量,就能获得精确的膝关节间隙曲线,对辅助注册工具的设计要求简单,易于实现。
附图说明
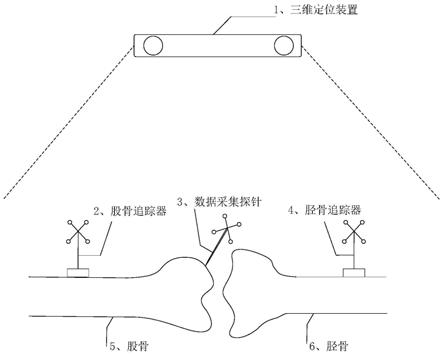
16.图1是本发明测量膝关节间隙曲线的布局图;
17.图2股骨和胫骨矢状面;
18.图3股骨和胫骨冠状面;
19.图4膝关节间隙曲线。
具体实施方式
20.为使本发明的技术细节阐述清楚,以下结合附图及实例,对发明的内容进行进一步详细说明。
21.如图1所示,本发明为一种医疗导航系统中测量膝关节间隙曲线的方法,具体如下:将股骨和胫骨追踪器分别固定在病人的股骨和胫骨上,将三维定位装置位置固定,股骨追踪器和股骨位置固定,胫骨追踪器和胫骨位置固定,三维定位装置以ndi公司的vega三维运动捕捉系统为例;
22.通过三维定位装置分别获取股骨和胫骨追踪器在定位装置坐标系下的位置,然后使用三维定位装置的数据采集探针分别采集股骨和胫骨表面的标记点,对探针数据和标记点数据进行配准,可获取股骨追踪器相对股骨、胫骨追踪器相对胫骨的位置关系,最终可求得胫骨相对股骨的位置关系。已知股骨切面数据和胫骨切面数据,将股骨和胫骨切面转换到同一坐标系下(这里转到股骨坐标系),通过股骨切面数据可分别计算出股骨远端内外测量点和股骨后侧内外测量点的坐标,详见图2和图3,通过计算股骨测量点到胫骨切面的垂直距离就可计算出膝关节间隙值,采集不同屈膝角下的间隙值,通过三次样条插值即可绘制出平滑的膝关节间隙曲线,详见图4。
23.具体的操作步骤如下:
24.将三维定位装置和股骨追踪器固定,然后利用三维定位装置的数据探针采集股骨表面标记点进行配准,计算出股骨追踪器和股骨之间的转换关系,获得
25.将三维定位装置和胫骨追踪器固定,然后利用三维定位装置的数据探针采集胫骨表面标记点进行配准[1],计算出胫骨追踪器和胫骨之间的转换关系,获得
[0026]
通过三维定位装置可实时获取三维定位装置相对于股骨追踪器和胫骨追踪器的位置关系,通过坐标转换可计算出胫骨相对股骨的位置关系
[0027]
将胫骨近端切面数据(点法公式)进行坐标转换乘以得到在股骨坐标系下的胫骨近端切面法向量normal
tibia
={p
x
,p
y
,p
z
},胫骨近端切面点original
tibia
={p
x
,p
y
,p
z
},通过股骨远端切面和股骨前侧斜切面数据可计算出股骨远端内外侧测量点},通过股骨远端切面和股骨前侧斜切面数据可计算出股骨远端内外侧测量点通过股骨后侧切面和股骨后侧斜切面数据可计算出股骨后侧内外侧测量点和股骨后侧斜切面数据可计算出股骨后侧内外侧测量点在屈膝角≥45
°
时,计算股骨后侧内外侧测量点与胫骨近端切面的垂直距离
在屈膝角<45
°
时,计算股骨远端内外侧测量点与胫骨近端切面的垂直距离测量点与胫骨近端切面的垂直距离
[0028]
活动膝关节使屈膝角从0
°
到90
°
缓慢变化,采集屈膝角度值和对应的内外侧间隙值。以屈膝角度值为x,内外侧间隙值为y,对采集数据进行三次样条插值得出更多的点数,对插值后的间隙值和屈膝角进行坐标转换即可绘制光滑的间隙值曲线。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1