一种穿刺手术医疗机器人
1.本发明涉及医疗器械技术领域,具体而言,涉及一种穿刺手术机器人。
背景技术:
2.穿刺手术机器人作为医疗手术机器人,在微创手术,放射性粒子植入手术,穿刺活检,血管介入,疼痛科微创介入手术等领域具有广泛的应用前景。
3.现有的穿刺手术机器人往往采用简单的串联或者关节式机械臂,由此带来一些无法避免的问题,在工作点位置调整的过程中,如需要末端执行机构实现平动时,常见通用的串联机械手往往刚度不足或者需要的自由度增加。
4.但是,串联式或关节式手术机器人存在一些问题,单臂式的串联机械臂针对胸腹腔的穿刺手术,由于其安装在手术台一侧,导致其工作空间与需求工作空间重合度较低,即为了实现更大有效的工作空间的话,需要其设计更大的尺寸。而龙门式或回转式的串联机器人,虽然工作空间与需求的工作空间重合度较高,但是其尺寸相比单臂式的穿刺手术机器人更大,而且在一定程度上会导致实施手术的医生操作范围收到较大的限制。对手术室条件的要求也更加苛刻。且工作空间依旧有浪费的情况。同时串联式机器人的稳定性,整体刚度也较差。
技术实现要素:
5.本发明实施例提供了一种穿刺手术医疗机器人,以解决穿刺手术机器人尺寸臃肿、工作空间利用率低、专用性差、刚度不足,以及定位流程和控制复杂等技术问题。
6.本技术实施方式中,机器人主体包括:机架,固定安装,其基本结构形式为两组互相垂直的矩形框架;直线导轨,设置在所述机架上,按照两组垂直相交于同一平面内并于第三组互相垂直的形式布置;驱动电机,与所述直线导轨驱动连接。
7.本技术实施方式中,3
‑
prr串并联混合机械臂包括:直线滑块,与所述直线导轨驱动连接,其上设置有旋转铰副;rr机构,由两个旋转副组合而成,与所述直线滑块和末端执行器通过旋转铰副驱动连接。
8.本技术实施方式中,末端执行器包括:末端执行器工作平台,其上设置有三组互相轴线互相垂直的旋转铰副,与3
‑
prr串并联混合机械臂驱动连接,同时末端执行器工作平台上设置有与r1弧形连杆 驱动连接的旋转铰副;平面r关节电机,与所述末端执行器工作平台驱动连接,用于驱动r1弧形连杆 旋转运动;r1弧形连杆 ,与所述末端执行器工作平台和平面r关节电机通过旋转铰副驱动连接;r2弧形连杆 ,与所述r1弧形连杆 和空间r关节电机通过旋转铰副驱动连接;空间r关节电机,与所述r2弧形连杆 驱动连接,用于驱动r2弧形连杆 旋转运动;进针导向架,设置在r2弧形连杆 上,用于穿刺手术针的导向;穿刺手术针。
9.本技术实施方式中,根据手术设定的进针角度,所述穿刺手术医疗机器人的r1弧形连杆 ,通过计算机控制器的控制,在平面r关节电机的驱动下,运动至预定姿态。
10.本技术实施方式中,根据手术设定的进针角度,所述穿刺手术医疗机器人的r2弧
形连杆 ,通过计算机控制器的控制,在平面r关节电机的驱动下,运动至预定姿态。
11.在一个实施方式中,所述rr机构的并联形式还可以是:采用n组rr机构在空间中交错布置,n≥3。
12.本发明提出一种新型的穿刺手术机器人,通过三组prr串联机构组成的3
‑
prr串并联混合机械臂,实现穿刺点在空间中的定位,通过远心定位末端执行器实现穿刺点的姿势调整,最终实现穿刺点位姿确定。实现穿刺点定位和调姿运动的解耦,降低控制难度。同时新型的穿刺手术机器人的末端执行器工作平台在运动过程中为平动,降低了手术过程中防碰撞路径规划的设计难度。
附图说明
13.构成本发明的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:图1为本案所述穿刺手术医疗机器人的结构示意图;图2为本案所述穿刺手术医疗机器人的机器人主体的结构示意图;图3为本案所述穿刺手术医疗机器人的结构侧视图。
具体实施方式
14.为使本发明的目的、技术方案和优点更加清楚明白,下面结合实施方式和附图,对本发明做进一步详细说明。在此,本发明的示意性实施方式及其说明用于解释本发明,但并不作为对本发明的限定。
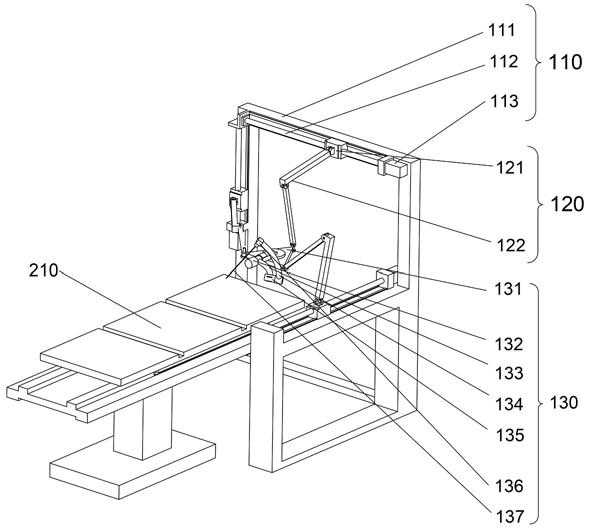
15.如图1所示,本发明的穿刺手术医疗机器人的实施例包括机器人主体110,3
‑
prr串并联混合机械臂120,末端执行器130,手术台200;机器人主体110,由机架111、三组互相垂直的直线导轨112以及驱动电机113组成;3
‑
prr串并联混合机械臂120,与所述机器人主体110驱动连接,由直线滑块121及rr机构122组成;末端执行器130,与所述3
‑
prr串并联混合机械臂120驱动连接,由末端执行器工作平台131、平面r关节电机132、r1弧形连杆 133、r2弧形连杆 134、空间r关节电机135、进针导向架136,以及穿刺手术针137组成;手术台200,用于支撑患者及水平方向上的定位。
16.如图2所示,机器人主体110的实施例包括机架111,固定安装,其基本结构形式为两组互相垂直的矩形框架;直线导轨112,设置在所述机架111上,按照两组垂直相交于同一平面内并于第三组互相垂直的形式布置;驱动电机113,与所述直线导轨112驱动连接。
17.如图2所示,3
‑
prr串并联混合机械臂120的实施例包括,直线滑块121,与所述直线导轨112驱动连接,其上设置有旋转铰副;rr机构122,与所述直线滑块121和末端执行器130通过旋转铰副驱动连接。
18.如图3所示,末端执行器130的实施例包括,末端执行器工作平台131,其上设置有三组互相轴线互相垂直的旋转铰副,与3
‑
prr串并联混合机械臂120驱动连接,同时末端执行器工作平台131上设置有与r1弧形连杆 133驱动连接的旋转铰副;平面r关节电机132,与所述末端执行器工作平台131驱动连接,用于驱动r1弧形连杆 133旋转运动;r1弧形连杆 133,与所述末端执行器工作平台131和平面r关节电机132通过旋转铰副驱动连接;r2弧形连杆 134,与所述r1弧形连杆 133和空间r关节电机135通过旋转铰副驱动连接;空间r关节
电机135,与所述r2弧形连杆 134驱动连接,用于驱动r2弧形连杆 134旋转运动;进针导向架136,设置在r2弧形连杆 134上,用于穿刺手术针137的导向;穿刺手术针137。
19.在实施穿刺手术过程中,病人被安置在手术床200上,预先初步调整病人在沿手术床方向的位置,使得病灶位置包括在机器人主体110的工作空间范围内;然后利用ct或者核磁共振对病灶位置进行检测,进针点一般为病灶于穿刺手术针直线方向于患者皮肤的交点,医生在计算机上对进针点和进针方向进行调整;当获得相关的检测信息后,机器人主体110,根据标定的位置信息,驱动电机113驱动直线导轨112旋转,三组直线滑块121沿着直线导轨112平移至各自预定位置,带动3
‑
prr串并联混合机械臂120的运动至预定位置,进而末端执行器工作平台131调整至预定位置。
20.末端执行器工作平台131调整至预定位置后,平面r关节电机132驱动r1弧形连杆133旋转至预定位置,空间r关节电机135驱动r2弧形连杆134旋转至预定位置,进针导向架136指向预定角度。
21.当进针点的位置和姿态调整至正确位姿后,穿刺手术针137处在进针点沿进针角度的延长线上。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1