一种影像注册装置的制作方法
1.本发明涉及医疗器械领域,具体涉及一种影像注册装置。
背景技术:
2.随着社会的不断进步发展,手术机器人越来越多的应用到实际当中,而导航则是手术机器人最为关键的步骤。在机器人手术过程中,需要将影像、机器人以及患者统一坐标,从而实现实时定位导航手术的功能。
3.x射线影像的注册配准离不开专用的注册装置,通常,需要用注册板将患者示踪器和影像统一坐标。其中,注册板需要贴合人体患处,注册板上的注册点需要被x射线类影像设备拍摄到影像图像当中,患者示踪器上的示踪球要便于导航设备的视觉识别系统识别,因此对于辅助装置使用时的临床摆位约束非常多,且在实际使用过程中每个患者的高矮胖瘦不一,很多情况下常规的辅助装置摆放位置就存在不便调节耗费时间,且易与影像成像设备发生干涉等风险。通常情况下,配准点与注册示踪器分开设置,使用一段时间后,注册板摩擦引起安装误差,会影响注册板整个运动学参数,造成配准误差过大。
技术实现要素:
4.发明目的:本发明针对上述不足,提出了一种影像注册装置,采用柔性设计,并将配准点与注册示踪器合二为一,保证注册精度。
5.一种影像注册装置,包括:
6.安装部,用于与末端执行器配合安装;
7.承载体,其上设有示踪器及注册点;
8.连接杆,用于连接安装部与承载体。
9.所述连接杆两端分别通过万向阻尼器与安装部和承载体连接。
10.所述承载体上的示踪器采用的是至少三个共面不共线的反光球。
11.每个所述反光球通过相应的立柱固定在所述承载体上方。
12.所述立柱为可伸缩立柱。
13.所述立柱可平移安装在承载体上。
14.所述立柱转动安装在所述承载体上,所述立柱的转动角度范围设置为与所述承载体垂线夹角0~40
°
范围内。
15.所述立柱通过球铰结构安装在所述承载体上。
16.所述注册点为根据预先规格排布设置于所述承载体内且不突出所述承载体表面的至少三个钢珠。
17.所述注册点为根据预先规格排布设置于所述承载体的表面或所述承载体的底部的至少三个钢珠。
18.在所述安装部上设置有与所述末端执行器的执行通道相对应的安装杆,所述安装部通过所述安装杆安装在所述末端执行器上。
19.在所述安装部上位于所述安装杆侧与所述末端执行器上开设的限位槽相对应位置处还设置有相对应的限位块。
20.所述万向阻尼器包括:
21.壳体,为中空结构;
22.球铰转轴,安装在所述壳体中空结构前端处,并与所述连接杆连接;
23.球铰底座,用于限制所述球铰转轴的位移。
24.在所述壳体中空结构内位于所述球铰底座后端还设置有碟形垫片,在所述碟形垫片顶紧所述球铰底座,在所述碟形垫片后端还设置有与所述壳体中空结构通过螺纹配合安装的调节紧固螺柱;通过所述调节紧固螺柱调节所述碟形垫片的变形量,进而调节所述球铰转轴转动时的摩擦阻尼。
25.有益效果:
26.1、本发明采用了柔性设计,使得注册装置安装到手术机器人末端执行器上时,还可以根据手术实际情况方便快捷的调整注册板的位置。
27.2、本发明将配准点与注册示踪器合二为一,消除加工、安装过程或磨损所造成的误差影响,保证注册精度。
28.3、本发明的注册示踪器可调,不仅防止遮挡,保证了ndi的识别效果,而且还可以有效防止患者示踪器和注册示踪器之间存在干涉,防止ndi无法区分患者示踪器和注册示踪器。
附图说明
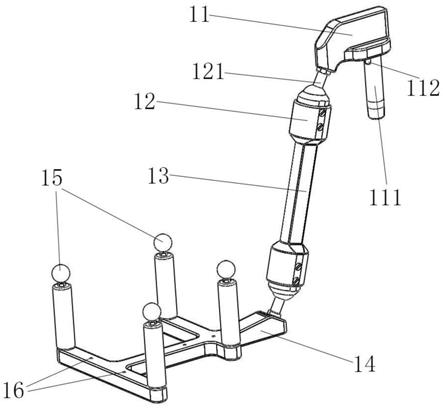
29.图1为本发明的柔性影像注册装置示意图。
30.图2为本发明的注册架部分局部视图。
31.图3为本发明的柔性影像注册装置使用场景示意图。
32.图4(a)为万向阻尼器的示意图。
33.图4(b)为万向阻尼器的剖视图。
34.图4(c)为万向阻尼器的爆炸图。
35.图5为本发明的注册装置另一种实施例。
36.其中,10为影像注册装置,11为安装固定座,111为安装杆,112为限位块,12为万向阻尼器,121为连杆,122为阻尼器壳体,123为球铰转轴,124为球铰底座,125为碟形垫片,126为调节紧固螺柱,13为连接杆,14为3d注册架,15为示踪球,16为标记点,2为末端执行器,3为手术床,4为患者。
具体实施方式
37.下面结合附图和具体实施例,进一步阐明本发明。
38.图1为本发明的影像注册装置示意图,如图1所示,本发明的影像注册装置10安装在手术机器人机械臂的末端执行器2上,其包括安装固定座11、连接杆13以及注册架14。
39.其中,安装固定座11上设置有安装杆111,该安装杆111的规格参数与形状与末端执行器2上的执行通道相对应,安装固定座11通过其安装杆111安装在末端执行器2上的执行通道内实现安装固定座11与末端执行器2之间的连接。在本发明中,在安装固定座11上位
于安装杆111侧还设置有限位块112,其与末端执行器2上相对应位置处开设的限位槽相配合以保证安装固定座11安装到位后安装固定座11不与末端执行器2发生相对运动。
40.连接杆13两端分别通过万向阻尼器12与安装固定座11和注册架14连接,其中,万向阻尼器12为阻尼可调节型万向阻尼器,可实现万向转动及悬停功能。如图4的(a)、(b)、(c)所示,万向阻尼器12包括阻尼器壳体122、球铰转轴123、球铰底座124、碟形垫片125以及调节紧固螺柱126,阻尼器壳体122为中空结构,球铰转轴123安装其中空结构前端,且阻尼器壳体122的中空结构前端内缩,从而将球铰转轴123限制在其中空结构前端;在阻尼器壳体122的中空结构内位于球铰转轴123后端处设置有用于限制球铰转轴123位移的球铰底座124,在球铰底座124后端设置有碟形垫片125,碟形垫片125顶紧球铰底座124,在阻尼器壳体122的中空结构位于碟形垫片125后端位置处设置有内螺纹,调节紧固螺柱126通过螺纹配合设置在该位置处,其前端顶紧碟形垫片125,并通过螺纹调节其与碟形垫片125之间的松紧程度,其顶得越紧,碟形垫片125的变形量就越大,碟形垫片125的变形量越大产生的作用力就越大,从而顶紧球铰底座124的力就越大,使得球铰底座124给球铰转轴123的压力就越大,球铰转轴123转动时的摩擦阻尼与球铰底座124给的压力成正比关系(f=μn,其中f为摩擦力,μ为摩擦系数为恒定值,n为压力),压力越大阻尼越大,从而可以调整球铰转轴123与球铰壳体122之间的摩擦阻尼,进而实现万向转动及悬停功能。
41.如图2所示,在注册架14上安装有至少三个示踪球15,每个示踪球15通过立柱与注册架14固定,所有示踪球15构成注册示踪器。现有注册过程中通常直接使用末端执行器上的示踪器,利用末端执行器及注册装置的加工参数计算出注册装置的位置,这种情况带来的问题在于注册装置的加工误差及连接处的磨损容易影像注册精度,因此本发明在注册架14上设置示踪球15用于注册。在使用过程中,通常的摆放顺序是ndi、患者示踪器、注册板连线排列,因此,示踪球15需要高于患者示踪器的高度或与注册架14的垂线成一定的角度,角度优选为20~40
°
。注册架的这种设置方式一是保证ndi能识别所有的示踪球15,防止存在遮挡,二是防止患者示踪器和注册示踪器之间存在干涉,防止ndi无法区分患者示踪器和注册示踪器。更优选的方式中,如图5所示,示踪球15与注册架14之间的立柱转动安装在注册架14上,可转动调整其安装角度,进而调整示踪球15与注册架14垂线之间的角度。
42.在本发明中,立柱可以通过球铰结构安装在注册架14上,进一步地,球铰结构可以采用前述万向阻尼器12。在本发明中,立柱还可以活动设置在注册架14上,不仅仅是转动,还可以实现立柱在注册架14上的平移,从而调整示踪球15的位置,采用的方案可以为导轨、丝杠螺母等平移方式。在本发明中,更进一步地,立柱可以设计为可伸缩结构,具体的方案可以采用伸缩杆,通过此设计可以实现示踪球15在高度上的位置调整。
43.本发明中,立柱的多角度调整设置都是为了避免反光球在实际手术操作中受到患者示踪器的遮挡,使本发明的注册装置应用更广泛。
44.在本发明中,示踪球15为球形,采用反光材质;在本发明中,示踪球15数量为4个。在注册架14上还根据预先设定规则排布有至少3个标记点16,在本发明中,标记点16采用便于x射线成像识别的材质。本发明中,标记点16为5个小钢珠。在具体实施方式中,标记点16可以置于注册架表面、注册架内部或注册架底部。考虑到小钢珠的频繁磨损会影响机器人精度,小钢珠优选为嵌于注册板内,不高于注册板表面。
45.在本发明中,连接杆13的数量并不一定为一根,具体数量根据实际需求确定,当连
接杆13数量为至少两根时,连接杆13之间也通过万向阻尼器12连接,且首尾的连接杆13末端分别通过万向阻尼器12与安装固定座11和注册架14连接。
46.本发明的工作过程如下:
47.1)如图3,首先将机械臂末端执行器2移动至患者4病患处附近(3为手术床);
48.2)然后将本发明的影像注册装置10安装到手术机器人机械臂末端执行器2上,确保安装固定座11上的限位块112卡入末端执行器2上的限位槽;
49.3)手动调整影像注册装置10,将注册架14放置在贴合于患处表面的位置,调整立柱至ndi能识别到患者示踪器及注册示踪器,即可进行x射线影像拍摄,进而实现注册功能。
50.由于,注册架14和安装固定座11通过两个万向阻尼器12连接到一起,万向阻尼器12自带阻尼可实现自身任意角度的悬停功能,这几者装配到一体,则实现了注册架14空间内多自由度的任意调节及随时悬停功能。
51.本发明采用的影像注册装置在注册前机械臂的执行只需要在病患处附近就可以,也不需要ndi能看到末端的示踪器,直接通过调整注册架就可以保证注册位置。
52.目前市面上导航手术机器人配套的注册装置多为刚性结构,安装到手术机器人机械臂末端执行器上,不便于调整摆放位置,只能依靠机械臂多次运动调整位置,而本发明采用了柔性设计,使得注册装置安装到手术机器人末端执行器上时,还可以根据手术实际情况方便快捷的调整注册板的位置。
53.以上详细描述了本发明的优选实施方式,但是本发明并不限于上述实施方式中的具体细节,在本发明的技术构思范围内,可以对本发明的技术方案进行多种等同变换(如数量、形状、位置等),这些等同变换均属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1