基于平面外扫描的超声波辅助穿刺装置的制作方法
1.本发明涉及介入类医疗器械领域,尤其涉及一种基于平面外扫描的超声波辅助穿刺装置。
背景技术:
2.血管介入手术等需要进行动脉穿刺的手术实施穿刺时,目前主要靠医生手触摸感知动脉位置,依靠感觉和经验进行血管穿刺,或入院后在超声机引导下进行穿刺。靠手感寻找穿刺位置,穿刺时间长,并有导致动脉血管损伤出血的风险,尤其对于急性脑卒中的介入手术,过长的准备时间会增加患者死亡的风险。而当前的超声引导穿刺则存在以下缺陷:(1)超声仪为通用型,用于血管穿刺时须操作者手动选择模式、设置参数等;(2)超声仪较大,须外接电源,限制使用场景,不方便途中或医院外使用;(3)价格较昂贵;(4)穿刺架须手动安装在超声探头上,操作者在找到目标血管后,须一手把持超声探头保持其不动,一手操作穿刺。因此,本领域亟待一种新的装置/方案,用以消除上述方式所提到的缺陷。
技术实现要素:
3.有鉴于现有技术所存在的不足,本发明提供一种基于平面外扫描的超声波辅助穿刺装置,实现桡动脉穿刺的同时,利用超声波平面外扫描的方式对桡动脉穿刺过程进行监控。其具体方案如下:
4.基于平面外扫描的超声波辅助穿刺装置,其包括但不限于:
5.机体,用于提供安装基础,设有一用于贴靠人体的超声波检测组件,所述超声波检测组件呈带条状;
6.机动穿刺模块,可拆装地设置于机体,并且具有安装部件和传动部件,所述机动穿刺模块与所述机体所设有的安装卡位;
7.显示模块,设置于机体;
8.以及电控单元,所述电控单元与所述超声波检测组件、所述机动穿刺模块、所述显示模块均电连接。
9.进一步地,所述机动穿刺模块包括:
10.外壳体,所述外壳体内部具有一个腔体;
11.针头,设于腔体的中部,所述腔体下端开设有供针头穿行的穿刺孔,定义针头的穿刺方向与目标血管位置的延伸方向所呈夹角为α,并且所述针头具有沿穿刺方向做直线运动的自由度;
12.导丝,所述导丝穿接于所述针头内,具有穿行于针头内部的活动自由度;
13.管鞘,位于所述腔体内与导丝共轴设置,具有穿行于所述腔体的运动自由度;
14.鞘芯,固定地内嵌于管鞘内部,一端为凸出于管鞘的穿刺端,另一端与管鞘平齐。
15.进一步地,所述的机动穿刺模块,其特征在于还包括第一输送组件、第二输送组件及第三输送组件,所述第一输送组件、第二输送组件及第三输送组件均设置于腔体;所述第
一输送组件用于输送针头,所述第二输送组件用于输送导丝,所述第三输送组件用于输送鞘管。
16.进一步地,所述针头具有针尖部及针管部,所述针管部的管壁开设有压力传导通道,该压力传导通道一端连通针尖部,该压力传导通道另一端连通一针头内部设有的压力腔室,所述压力腔室内安装有压力传感器。
17.进一步地,所述外壳体设有一穿行孔,供所述管鞘、针头、导丝穿行于外壳体内外,靠近穿刺端设有一侧开门。
18.进一步地,所述安装卡位的内壁和机动穿刺模块之间设有可解除的锁止组件,所述锁止组件包括安装卡位的内壁所设有前扣接孔、后扣接孔以及位于机动穿刺模块侧壁的前插销、后插销;所述前插销与前扣接孔一一对应,所述后插销和后扣接孔一一对应。
19.进一步地,所述安装卡位的内壁和机动穿刺模块之间设有可解除的传动组件,所述传动组件包括设于安装卡位的内壁的传动件公头,以及设于机动穿刺模块侧壁的传动件母头,所述传动件公头和传动件母头之间可分离地卡扣配合。
20.进一步地,所述超声波检测组件包括发声器件和接收器件。
21.同时,本发明也公开一种基于平面外扫描的超声波辅助穿刺装置的使用方法,应用于上述的最佳方案,其具体包括硬件设备和操作流程:
22.所述硬件设备,包括:
23.机体,用于提供安装基础,设有一用于贴靠人体的超声波检测组件,所述超声波检测组件呈带条状;
24.机动穿刺模块,可拆装地设置于机体,并且具有安装部件和传动部件,所述机动穿刺模块与所述机体所设有的安装卡位;机动穿刺模块包括外壳体、针头、导丝、管鞘、鞘芯,所述外壳体内部具有一个腔体;所述针头设于腔体的中部,所述腔体下端开设有供针头穿行的穿刺孔,定义针头的穿刺方向与目标血管位置的延伸方向所呈夹角为α,并且所述针头具有沿穿刺方向做直线运动的自由度;所述导丝穿接于所述针头内,具有穿行于针头内部的活动自由度;所述管鞘位于所述腔体内与导丝共轴设置,具有穿行于所述腔体的运动自由度;所述鞘芯固定地内嵌于管鞘内部,一端为凸出于管鞘的穿刺端,另一端与管鞘平齐;
25.显示模块,设置于机体;
26.电控单元,所述电控单元与所述超声波检测组件、所述机动穿刺模块、所述显示模块均电连接;
27.以及操作流程,所述操作流程依次包括以下步骤:
28.s1:开机,在患者待检测位置涂抹超声介质;
29.s2:超声探头接触人体并寻找目标动脉血管,;
30.s3:找到目标动脉血管并充分接触肌肤后,并将目标血管界面影像置于屏幕标识范围内;
31.s4:驱动针头凸出于穿刺孔,依次穿过皮肤、肌肉最后穿破血管壁,针头进入目标血管内部;
32.s5:导丝从机动穿刺模块中穿过针管,进入至目标血管内部;当导丝的远端到达颅内血管的病变位置后,执行s6;
33.s6:管鞘带着鞘芯从机动穿刺模块的穿刺孔出来,套接在针管外围,缓慢进入至目
标血管内部,当管鞘进入至目标血管的长度与针管进入至目标血管的长度相等时,执行s7;
34.s7:针管退出目标血管,回归至所述机动穿刺模块内部;
35.s8:所述机动穿刺模块打开侧开门,使得管鞘、鞘芯脱离,完成穿刺。
36.进一步地,所述基于平面外扫描的超声波辅助穿刺装置的使用方法还包括子步骤:如果手术操作者在显示模块中发现针头穿刺桡动脉的位置不好或者出现异常,则停止s4步骤,从针头的针尖部退回至穿行孔附近,再重新执行s4。
37.相较于现有技术,实施本发明的有益效果在于:
38.(1)本发明所述的基于平面外扫描的超声波辅助穿刺装置,其由超声系统和穿刺系统两部分构成,超声系统与患者待检部位接触,并且收集超声信号,形成图像数据后在显示模块输出影像,实现指引手术操作者更顺利地找到目标血管,手术操作者在超声系统指引下,操作穿刺系统完成血管穿刺操作,其中通过穿刺架保证穿刺针与超声探头相对位置,如此设计,更有利于观察和操作;
39.(2)本发明所述的基于平面外扫描的超声波辅助穿刺装置,属于一款便携的、可单手操作的、具备超声定位穿刺功能、利用超声成像参数预设为适宜血管穿刺的实时超声引导穿刺设备,其相较于常规方案采用通用性的超声仪器,本发明所述装置具有较高的功能集成度,超声检测模块专用于桡动脉入路穿刺操作,因此,可以免去以往通用超声设备需要预调参数的麻烦,因此大幅降低成本;
40.(3)有异于常规的平面内扫描的方式,采取平面外扫描的方式,则可以更清晰地,及时地让医生知晓针头穿刺桡动脉位置当前状态。
41.(4)以可拆装的功能集成模块的方式,实现对桡动脉入路的穿刺,方便快捷,所有的执行机构集成于一个较小的模块当中。
42.(5)发现穿刺位置不正确时,所述机动穿刺模块具有退针模式,使得针头即使退出,保障患者的安全。
附图说明
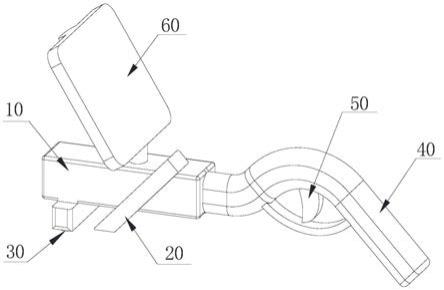
43.图1为本发明所述的基于平面外扫描的超声波辅助穿刺装置一视角外观示意图;
44.图2为本发明所述的基于平面外扫描的超声波辅助穿刺装置另一视角外观示意图;
45.图3为本发明所述的基于平面外扫描的超声波辅助穿刺装置的主视图;
46.图4为本发明所述扳机的局部视图;
47.图5a为平面外扫描设置方式的超声模块与针头穿刺位置关系的示意图;
48.图5b为平面外扫描及平面内扫描设置方式的超声模块与针头穿刺位置关系的示意图;
49.图6a机动穿刺模块与机体之间装载关系的一示意图;
50.图6b机动穿刺模块与机体之间装载关系的另一示意图。
51.图7为机动穿刺模块的结构示意图;
52.图8为图7的a处局部视图;
53.图9为针头的截面视图;
54.图10为针管的示意图;
55.图11a为使用本发明用于动脉穿刺时的位置关系第一示意图;
56.图11b为使用本发明用于动脉穿刺时的位置关系第二示意图;
57.图11c为使用本发明用于动脉穿刺时的位置关系第三示意图;
58.图11d为使用本发明用于动脉穿刺时的位置关系第四示意图;
59.图11e为使用本发明用于动脉穿刺时的位置关系第五示意图;
60.图12为所述鞘管已穿刺于动脉血管的位置关系示意图;
61.图13a为所述侧开门释放鞘芯、鞘管时的位置关系第一示意图;
62.图13b为所述侧开门释放鞘芯、鞘管时的位置关系第二示意图;
63.图13c为所述侧开门释放鞘芯、鞘管时的位置关系第三示意图。
64.图中,10、机体;20、机动穿刺模块;200、针管;2000、第一输送组件;2001、第二输送组件;2002、第三输送组件;2003、头端;201、导丝;202、压力传导通道;2021、压力腔室;2022、压力传感器;203、鞘芯;204、管鞘;21、穿行孔;22、安装卡位;220、传动件母头;221、传动件公头;222、前扣接孔;223、前插销;224、后插销;225、后扣接孔;30、超声探头模块;31、超声波检测组件;40、手柄部;50、扳机;51、第一位置;52、第二位置;60、显示模块;70、手臂;71、桡动脉;72、肌肤。
具体实施方式
65.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图、实施例、变型例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。同时为了方便表述各部位、零件等个体,本发明会使用到“左”、“右”、“前”、“后”、“上”、“下”等表示位置关系的描述;本发明中带有“第一”、“第二”等带序号的描述,原则上仅用以区分描述的对象,不涉及任何重要性区别、排列区别的意思。
66.如图1
‑
图13c所示,本发明所述的基于平面外扫描的超声波辅助穿刺装置,其包括但不限于机体10、机动穿刺模块20、显示模块60、电控单元。
67.所述机体10用于提供安装基础,作为优选的实施例,所述机体10可以包括工作部和手柄部40,所说工作部呈长方体,所述手柄部40在所述工作部所具有的长度方向的一端往外延伸。所述机体10设有一用于贴靠人体的超声波检测组件31,超声波检测组件31贴靠人体的具体位置是手臂70桡动脉71外侧的肌肤72,所述超声波检测组件31呈带条状,并且,所述超声探头模块30发出的超声波频率范围为≥40mhz;所述机动穿刺模块20可拆装地设置于机体10,并且具有安装部件和传动部件,所述机动穿刺模块20与所述机体10所设有的安装卡位22,所述安装卡位22具有与机动穿刺模块20吻合的结构;所述显示模块60设置于机体10,用于输出超声波检测组件31所测得的桡动脉71血管穿刺状况的图像;所述电控单元与所述超声波检测组件31、所述机动穿刺模块20、所述显示模块60均电连接。
68.具体地,机动穿刺模块包括但不限于:外壳体、针头、导丝、管鞘与鞘芯。所述外壳体内部具有一个腔体;所述针头设于腔体的中部,所述腔体下端开设有供针头穿行的穿刺孔,所述针头具有进入和退出所述机动穿刺模块的自由度。所述针头穿刺桡动脉71只是为了放置上述一些介入类的医疗器件。
69.定义针头的穿刺方向与目标血管位置的延伸方向所呈夹角为α,并且所述针头具有沿穿刺方向做直线运动的自由度;所述导丝穿接于所述针头内,具有穿行于针头内部的
活动自由度;所述管鞘位于所述腔体内与导丝共轴设置,具有穿行于所述腔体的运动自由度;所述鞘芯固定地内嵌于管鞘内部,一端为凸出于管鞘的穿刺端,另一端与管鞘平齐。具体地,上述的α角的数值可以是45
°
。
70.为了实现对上述部分部件的驱动,所述机动穿刺模块还包括第一输送组件、第二输送组件及第三输送组件,所述第一输送组件、第二输送组件及第三输送组件均设置于腔体;所述第一输送组件用于输送针头,所述第二输送组件用于输送导丝,所述第三输送组件用于输送鞘管。所述机动穿刺模块由外部的机体提供动力,并且与外部的机体在安装卡位可拆卸地连接。
71.具体地,作为一种优选的实施方案,所述针头具有针尖部及针管部,所述针管部的管壁开设有压力传导通道,该压力传导通道一端连通针尖部,该压力传导通道另一端连通一针头内部设有的压力腔室,所述压力腔室内安装有压力传感器。
72.作为一种优选的实施方案,所述外壳体设有一穿行孔,供所述管鞘、针头、导丝穿行于外壳体内外,靠近穿刺端设有一侧开门。
73.作为一种优选的实施方案,超声波检测组件31安装于所述工作部下端所设置的超声探头模块30,所述超声波检测组件31包括发声器件和接收器件。所述发声器件、接收器件均电控单元与电性连接。
74.作为一种优选的实施方案,手柄部40设有用于触发操作的扳机50,所述扳机50和电控单元电连接,所述扳机50包括按键,所述按键具有第一位置51和第二位置52,所述第一位置51为按键为断路状态的位置,所述第二位置52为按键通路状态的位置,所述扳机50内部设有弹簧,使按键保持于第一位置51。所述第一位置51和第二位置52的角位移可以为20
°
。
75.作为一种优选的实施方案,所述安装卡位22的内壁和机动穿刺模块20之间设有可解除的锁止组件,所述锁止组件包括安装卡位22的内壁所设有前扣接孔222、后扣接孔225以及位于机动穿刺模块20侧壁的前插销223、后插销224;所述前插销223与前扣接孔222一一对应,所述后插销224和后扣接孔225一一对应。所述前插销223和后插销224均安装有驱动其凸出或退回的驱动组件。
76.作为一种优选的实施方案,所述安装卡位22的内壁和机动穿刺模块20之间设有可解除的传动组件,所述传动组件包括设于安装卡位22的内壁的传动件公头221,以及设于机动穿刺模块20侧壁的传动件母头220,所述传动件公头221和传动件母头220之间可分离地卡扣配合,例如采用六角公头和六角母头。
77.作为一种优选的实施方案,所述显示模块60用于输出外部使用者桡动脉71被穿刺时的影像。
78.电控单元内存储有预装的程序,所述程序用于发出指令让相关执行器件驱动针头进行穿刺,驱动其他介入类器件进入人体的指令,最终退出。
79.本发明所述基于平面外扫描的超声波辅助穿刺装置的使用方法,依次包括以下步骤:
80.s1:开机,在患者待检测位置涂抹超声介质;
81.s2:超声探头接触人体并寻找目标动脉血管,目标动脉血管可以是桡动脉;
82.s3:找到目标动脉血管并充分接触肌肤后,并将目标血管界面影像置于屏幕标识
范围内;
83.s4:驱动针头凸出于穿刺孔,依次穿过皮肤、肌肉最后穿破血管壁,针头进入目标血管内部;
84.s5:导丝从机动穿刺模块中穿过针管,进入至目标血管内部;当导丝的远端到达颅内血管的病变位置后,执行s6;
85.s6:管鞘带着鞘芯从机动穿刺模块的穿刺孔出来,套接在针管外围,缓慢进入至目标血管内部,当管鞘进入至目标血管的长度与针管进入至目标血管的长度相等时,执行s7;
86.s7:针管退出目标血管,回归至所述机动穿刺模块内部;
87.s8:所述机动穿刺模块打开侧开门,使得管鞘、鞘芯脱离,完成穿刺。
88.进一步地,所述使用方法还包括子步骤s41:如果手术操作者在显示模块中发现针头穿刺桡动脉的位置不好或者出现异常,则停止s4步骤,从针头的针尖部退回至穿行孔附近,再重新执行s4。
89.以上所述仅为本发明的较佳实施例、变型例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应视之包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1