一种智能肠内营养冲配装置
1.本发明涉及一种配药装置,特别涉及一种智能肠内营养冲配装置。
背景技术:
2.任何疾病都离不开营养支持和治疗。目前,由于肠外营养的长期使用会引起诸如肠粘膜萎缩、肠道屏障削弱、肝胆系统功能紊乱等系列问题,肠内营养在临床上的应用日趋受到重视。肠内营养,特别是各种形式的肠内营养,应该受到更多的关注,它的作用等同于药物和其他治疗手段,已被公认为临床一线治疗的手段。临床住院患者尤其是胃肠肿瘤患者大约40%存在营养不良和营养风险,需要肠内营养支持治疗。随着患者的增多,医生的任务就越来越繁重,为有效解决患者的用药问题和医生个体化精准用药问题及实现肠内营养的个体化配制,临床对智能化调配医药器械的需求在不断的增涨。
3.目前也有自动配药的配药设备,但现有的配药设备成本高,占地面积大且系统复杂,维护不方便,不适用于小医院诊所或药店等配药量较少的医疗机构;有些配药设备的机械手抓取药物时,机械手上会留有药品的残留,在抓取下一味药品时,影响下一味药抓取的重量;有些配药设备不可实现冲配混合功能,肠内营养液无法使用其调配;有些配药设备不能实现同时多组方成分的肠内营养组件进行自动混合冲配,或者配置过程中需要人工操作进行称量,自动化程度低、浪费人力资源。因此需要一种全自动的智能肠内营养冲配装置,具有多种肠内营养配方组件调配、对配方组件精确称量和可选择性进行冲剂的功能,同时操作简便,能够避免肠内营养各组件成分交叉污染。
技术实现要素:
4.为了解决上述技术问题,本发明提供一种智能肠内营养冲配装置,包括架体、配药装置、接药装置、冲剂装置、抓取装置、控制系统,所述的架体设有第一载物板、第二载物板和第三载物板,第一载物板和第二载物板设在架体一侧,第三载物板设在架体另一侧,第一载物板设在第二载物板上方,第一载物板上设有数个安装孔,每个安装孔处分别设有一套配药装置;所述的接药装置设在第二载物板上,冲剂装置和抓取装置设在第三载物板上;控制系统设在架体上,通过线路分别与配药装置、接药装置、冲剂装置和抓取装置相连。
5.所述的配药装置包括第一电机支架、第一电机、第一齿轮、第一外齿回转轴承和装药瓶,第一电机支架连接在架体的第一载物板下侧,第一电机固定在第一电机支架下端,第一电机的输出轴穿过第一电机支架上的通孔与第一齿轮固连;第一外齿回转轴承的内圈通过法兰盘固定在第一载物板的安装孔,第一外齿回转轴承与第一齿轮相啮合;所述的装药瓶包括瓶体、上瓶盖和下瓶盖,下瓶盖与瓶体固连,上瓶盖扣合在下瓶盖上,上瓶盖表面设有出药口,下瓶盖对应出药口处设有出药口挡片;装药瓶倒立设置,下瓶盖卡接在第一外齿回转轴承的内圈,上瓶盖卡接在第一外齿回转轴承的外圈;第一外齿回转轴承的外圈旋转会带动上瓶盖相对于下瓶盖旋转,出药口和出药口挡片错开使瓶体内药物流出。第一电机通过线路与控制系统相连。
6.所述的装药瓶的上瓶盖外圈设有卡接凸起,用于与第一外齿回转轴承的外圈卡接;下瓶盖外圈设有凸楞,用于与第一外齿回转轴承的内圈卡接。
7.所述的配药装置还包括光电传感器,光电传感器通过光电传感器支架固定在第一载物板下侧,第一外齿回转轴承的外圈设有光电传感器挡片;光电传感器通过线路与控制系统相连。
8.所述的接药装置包括丝杠滑台、连接板、第二外齿回转轴承、回转盘、滑环、第二电机支架、第二电机、第二齿轮、接药杯支架、重力传感器、第三电机,所述的丝杠滑台设在第二载物板上,连接板固定在丝杠滑台的滑动座上,连接板上部通过支撑柱与第二外齿回转轴承的内圈相连,第二外齿回转轴承的外圈固定在回转盘底部;滑环的下端通过法兰盘固定在连接板上,上端穿过第二外齿回转轴承的内圈与回转盘底部相连;第二电机支架设在连接板侧边,第二电机固定在第二电机支架上,第二齿轮与第二电机输出轴固连,并与第二外齿回转轴承相啮合;回转盘上部规则分布有接药杯支架,接药杯下部设有重力传感器,重力传感器的线路通过滑环与外部的控制系统相连;接药杯设在接药杯支架内,接药杯底部位于重力传感器上;第三电机的输出轴与丝杠滑台相连;第二电机、第三电机分别通过线路与控制系统相连。
9.所述的冲剂装置包括自动封口机、全自动恒温水箱、电磁阀、流速传感器、定量泵,所述的自动封口机设在架体的第三载物板上,全自动恒温水箱设在架体底部,电磁阀和流速传感器设在全自动恒温水箱的出水口,全自动恒温水箱的出水口通过管路与定量泵相连,定量泵另一端通过管路连接到自动封口机的杯座上方;自动封口机、全自动恒温水箱、电磁阀、流速传感器、定量泵分别通过线路与控制系统相连。
10.所述的抓取装置包括固定座、旋转台、第一机械臂、第二机械臂、机械手,所述的固定座固定在第三载物板上,旋转台位于固定座上方,旋转电机固定在旋转台上,旋转电机的输出轴穿过旋转台上的通孔与固定座相连;第一机械臂一端枢接在旋转台上,另一端与第二机械臂枢接,第二机械臂另一端与机械手枢接;第一机械臂电机的输出轴与第一机械臂的下端相连;第二机械臂电机的输出轴与第一连杆相连,第一连杆上端与第二连杆枢接,第二连杆另一端与第二机械臂的旋转部上部枢接;三角连接板的第一角与第一机械臂和第二机械臂的连接轴枢接,第二角与第三连杆一端枢接,第三角与第四连杆枢接;第三连杆另一端与机械手枢接,第四连杆另一端与第五连杆枢接,第五连杆下端固定在旋转台上;旋转电机、第一机械臂电机、第二机械臂电机分别通过线路与控制系统相连。所述的机械手自带机械手控制电机,机械手控制电机控制机械手的抓握,机械手控制电机通过线路与控制系统相连。
11.所述的架体上设有装杯筒和接药槽,装杯筒位于接药装置和抓取装置之间;接药槽设在架体侧边,位于抓取装置下方。
12.所述的控制系统为工控一体机,属于现有设备。
13.所述的架体底部设有万向轮。
14.本发明的工作原理:
15.本发明提供的一种智能肠内营养冲配装置是一种营养粉剂及冲剂一体的全自动调配装置。首先将不同营养组件的装药瓶倒置放入配药装置内,装药瓶的下瓶盖固定在第一外齿回转轴承的内圈法兰盘内,装药瓶的上瓶盖固定在第一外齿回转轴承的外圈;通过
控制系统输入需要的肠内营养配方,由控制系统发出控制指令,抓取装置的旋转电机带动旋转台转动相应角度,第一机械臂电机、第二机械臂电机带动第一机械臂和第二机械臂弯折相应角度,使机械手位于装杯筒下方,机械手自带的机械手控制电机控制机械手将接药杯从装杯筒下方出口取出,再反向转动相应角度将接药杯放入回转盘上的接药杯支架内;由控制系统发出控制指令,第三电机带动丝杠滑台的滑动座精准移动,配合着第二电机的转动带动第二齿轮转动,从而使第二外齿回转轴承带动回转盘转动,使接药杯对准相应的装药瓶下方出药口;由控制系统发出控制指令,相应的装药瓶对应的配药装置中的第一电机带动第一齿轮旋转,进而通过第一齿轮带动第一外齿回转轴承旋转,使装药瓶上瓶盖转动,根据第一外齿回转轴承的光电传感器挡片及光电传感器的感应确定第一外齿回转轴承转动的角度进而确定装药瓶出药口的开口程度,装药瓶内药品流出精准落入接药杯内。接药杯下部的重力传感器称量每次承接的药品的重量,当达到所需药量后由控制系统发出控制指令,控制第一电机反转使装药瓶关闭。
16.接药装置的丝杠滑台和第二电机控制相应的接药杯的移动,使其能根据配方需求在不同装药瓶下方接药。通过配药装置和接药装置的相互配合,一次可以精准的配出多种营养处方,配完药后由控制系统发出控制指令,丝杠滑台的滑动座回到原点,此时可以通过控制系统选择是否进行冲剂,如果选择冲剂,抓取装置会将接药杯从接药杯支架中取出,放入自动封口机的杯座内,此时控制系统控制定量泵开始工作,将所需温度的水通过管路流进接药杯内一定量,自动封口机将接药杯封好,抓取装置将接药杯放入接药槽内,直接取出即可;如果选择不冲剂,抓取装置会将接药杯放入自动封口机的杯座内,自动封口机将接药杯封好,抓取装置再将接药杯放入接药槽内。根据不同肠内营养配方的不同需求,可以通过冲剂装置内的流速传感器控制热水流速,并通过电磁阀控制流量。
17.本发明的有益效果:
18.本发明提供的一种智能肠内营养冲配装置能自动准确地将肠内营养处方中的药物配齐,并封装送出;有效降低配药护理人员的劳动强度,提高药物剂量的准确性,自动化程度高,配药过程无需人工参与,配药速度快,在肠内营养配药方面具有广泛应用前景。本发明实现了肠内营养多组件配方的精准配合,一次性放入该装置中的六种不同的肠内营养组件,可以个体化配出多种肠内营养配方,并且该装置可实现对配好的肠内营养配方进行冲剂和粉剂两种功能,相比现有的只能对药物进行配方却不能进行冲剂的装置具有显著的进步。
附图说明
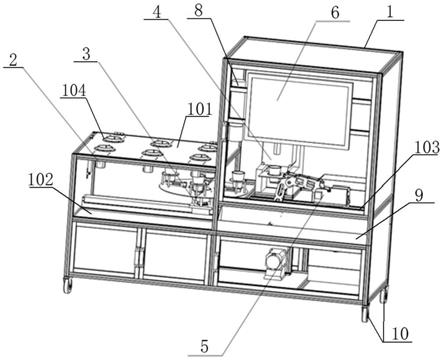
19.图1为本发明整体结构示意图;
20.图2为本发明配药装置结构示意图;
21.图3为本发明装药瓶结构示意图;
22.图4为本发明接药装置结构示意图;
23.图5为本发明接药装置局部结构示意图;
24.图6为本发明冲剂装置结构示意图;
25.图7为本发明抓取装置结构示意图;
26.1、架体2、配药装置3、接药装置4、冲剂装置5、抓取装置
27.6、控制系统7、法兰盘8、装杯筒9、接药槽10、万向轮
28.101、第一载物板102、第二载物板103、第三载物板104、安装孔
29.201、第一电机支架202、第一电机203、第一齿轮
30.204、第一外齿回转轴承205、瓶体206、上瓶盖207、下瓶盖
31.208、出药口209、出药口挡片210、卡接凸起211、凸楞
32.212、光电传感器213、光电传感器支架214、光电传感器挡片
33.301、丝杠滑台302、连接板303、第二外齿回转轴承304、回转盘
34.305、滑环306、第二电机支架307、第二电机308、第二齿轮
35.309、接药杯支架310、重力传感器311、第三电机312、支撑柱
36.401、自动封口机402、全自动恒温水箱403、电磁阀404、流速传感器
37.405、定量泵406、管路
38.501、固定座502、旋转台503、第一机械臂504、第二机械臂
39.505、机械手506、旋转电机507、第一机械臂电机508、第二机械臂电机
40.509、第一连杆510、第二连杆511、三角连接板512、第三连杆
41.513、第四连杆514、l形连接部515、第五连杆。
具体实施方式
42.请参阅图1
‑
7所示:
43.本发明提供一种智能肠内营养冲配装置,包括架体1、配药装置2、接药装置3、冲剂装置4、抓取装置5、控制系统6,所述的架体1设有第一载物板101、第二载物板102和第三载物板103,第一载物板101和第二载物板102设在架体1一侧,第三载物板103设在架体1另一侧,第一载物板101设在第二载物板102上方,第一载物板101上设有6个安装孔104,每个安装孔104处分别设有一套配药装置2;所述的接药装置3设在第二载物板102上,冲剂装置4和抓取装置5设在第三载物板103上;控制系统6设在架体1上,通过线路分别与配药装置2、接药装置3、冲剂装置4和抓取装置5相连。
44.所述的配药装置2包括第一电机支架201、第一电机202、第一齿轮203、第一外齿回转轴承204和装药瓶,第一电机支架201连接在架体1的第一载物板101下侧,第一电机202固定在第一电机支架201下端,第一电机202的输出轴穿过第一电机支架201上的通孔与第一齿轮203固连;第一外齿回转轴承204的内圈通过法兰盘7固定在第一载物板101的安装孔104,第一外齿回转轴承204与第一齿轮203相啮合;所述的装药瓶包括瓶体205、上瓶盖206和下瓶盖207,下瓶盖207与瓶体205固连,上瓶盖206扣合在下瓶盖207上,上瓶盖206表面设有出药口208,下瓶盖207对应出药口208处设有出药口挡片209;装药瓶倒立设置,下瓶盖207卡接在第一外齿回转轴承204的内圈,上瓶盖206卡接在第一外齿回转轴承204的外圈;第一外齿回转轴承204的外圈旋转会带动上瓶盖206相对于下瓶盖207旋转,出药口208和出药口挡片209错开使瓶体205内药物流出。第一电机202通过线路与控制系统6相连。
45.所述的装药瓶的上瓶盖206外圈设有卡接凸起210,用于与第一外齿回转轴承204的外圈卡接;下瓶盖207外圈设有凸楞211,用于与第一外齿回转轴承204的内圈卡接。
46.所述的配药装置2还包括光电传感器212,光电传感器212通过光电传感器支架213固定在第一载物板101下侧,第一外齿回转轴承204的外圈设有光电传感器挡片214;光电传
感器212通过线路与控制系统6相连。
47.所述的接药装置3包括丝杠滑台301、连接板302、第二外齿回转轴承303、回转盘304、滑环305、第二电机支架306、第二电机307、第二齿轮308、接药杯支架309、重力传感器310、第三电机311,所述的丝杠滑台301设在第二载物板102上,连接板302固定在丝杠滑台301的滑动座上,连接板302上部通过支撑柱312与第二外齿回转轴承303的内圈相连,第二外齿回转轴承303的外圈与回转盘304底部固定;滑环305的下端通过法兰盘7固定在连接板302上,上端穿过第二外齿回转轴承303的内圈与回转盘304底部相连;第二电机支架306设在连接板302侧边,第二电机307固定在第二电机支架306上,第二电机307输出轴与第二齿轮308固连,第二齿轮308与第二外齿回转轴承303相啮合;回转盘304上部规则分布有4个接药杯支架309,接药杯下部设有重力传感器310,重力传感器310的线路通过滑环305与外部的控制系统6相连;接药杯设在接药杯支架309内,接药杯底部位于重力传感器310上;第三电机311的输出轴与丝杠滑台301相连;第二电机307、第三电机311分别通过线路与控制系统6相连。
48.所述的冲剂装置4包括自动封口机401、全自动恒温水箱402、电磁阀403、流速传感器404、定量泵405,所述的自动封口机401设在架体1的第三载物板103上,全自动恒温水箱402设在架体1底部,电磁阀403和流速传感器404设在全自动恒温水箱402的出水口,全自动恒温水箱402的出水口通过管路406与定量泵405相连,定量泵405另一端通过管路406连接到自动封口机401的杯座上方;自动封口机401、全自动恒温水箱402、电磁阀403、流速传感器404、定量泵405分别通过线路与控制系统6相连。
49.所述的抓取装置5包括固定座501、旋转台502、第一机械臂503、第二机械臂504、机械手505、旋转电机506、第一机械臂电机507、第二机械臂电机508,所述的固定座501固定在第三载物板103上,旋转台502位于固定座501上方,旋转电机506固定在旋转台502上,旋转电机506的输出轴穿过旋转台502上的通孔与固定座501相连;第一机械臂503一端枢接在旋转台502上,另一端与第二机械臂504枢接,第二机械臂504另一端通过l形连接部514与机械手505枢接;第一机械臂电机507的输出轴与第一机械臂503的下端相连;第二机械臂电机508的输出轴与第一连杆509相连,第一连杆509上端与第二连杆510枢接,第二连杆510另一端与第二机械臂504的旋转部上部枢接;三角连接板511的第一角与第一机械臂503和第二机械臂504的连接轴枢接,第二角与第三连杆512一端枢接,第三角与第四连杆513枢接;第三连杆512另一端与机械手505的l形连接部514上部枢接,第四连杆513另一端与第五连杆515枢接,第五连杆515下端固定在旋转台502上;旋转电机506、第一机械臂电机507、第二机械臂电机508分别通过线路与控制系统6相连。所述的机械手505自带机械手控制电机,机械手控制电机控制机械手505的抓握,机械手控制电机通过线路与控制系统6相连。
50.所述的架体1上设有装杯筒8和接药槽9,装杯筒8下端开口,装杯筒8位于接药装置3和抓取装置5之间,抓取装置5从装杯筒8下端口取出接药杯;接药槽9设在架体1侧边,位于抓取装置5下方,接药槽9内外两边开口,抓取装置5将封口的接药杯从内侧口投入,工作人员从外侧口取出。
51.所述的控制系统6为工控一体机,属于现有设备,具有输出数据、数据传输、数据存储、显示、语音等功能。
52.所述的架体1底部设有万向轮10,方便架体移动。
53.本发明的工作原理:
54.本发明提供的一种智能肠内营养冲配装置是一种配药及冲剂一体的全自动装置。首先将不同肠内营养组件成分的装药瓶倒置安装在配药装置2内,装药瓶的下瓶盖207固定在第一外齿回转轴承204的内圈法兰盘7内,装药瓶的上瓶盖206固定在第一外齿回转轴承204的外圈;通过控制系统6输入需要的药方,由控制系统6发出控制指令,抓取装置5的旋转电机506带动旋转台502转动相应角度,第一机械臂电机507、第二机械臂电机508带动第一机械臂503和第二机械臂504弯折相应角度,使机械手505位于装杯筒8下方,机械手505自带的机械手控制电机控制机械手505将接药杯从装杯筒8下方出口取出,再反向转动相应角度将接药杯放入回转盘304上的接药杯支架309内;由控制系统6发出控制指令,第二电机转动带动第二齿轮308转动,从而使第二外齿回转轴承303带动回转盘304转动,抓取装置5在每个接药杯支架309内放入接药杯;由控制系统6发出控制指令,第三电机311带动丝杠滑台301的滑动座精准移动,配合着第二电机307的转动带动第二齿轮308转动,从而使第二外齿回转轴承303带动回转盘304转动,使接药杯对准相应的装药瓶下方出药口208;由控制系统6发出控制指令,相应的装药瓶对应的配药装置2中的第一电机202带动第一齿轮203旋转,进而通过第一齿轮203带动第一外齿回转轴承204旋转,使装药瓶上瓶盖206转动,根据第一外齿回转轴承204的光电传感器挡片214及光电传感器212的感应确定第一外齿回转轴承204转动的角度进而确定装药瓶出药口208的开口程度,装药瓶内药品流出精准落入接药杯内。接药杯下部的重力传感器310称量每次承接的药品的重量,当达到所需药量后由控制系统6发出控制指令,控制第一电机202反转使装药瓶关闭。
55.接药装置3的丝杠滑台301和第二电机307控制相应的接药杯的移动,使其能根据药方需求在不同装药瓶下方接药。通过配药装置2和接药装置3的相互配合,一次可以精准的配出720种药方,配完药后由控制系统6发出控制指令,丝杠滑台301的滑动座回到原点,此时可以通过控制系统6选择是否进行冲剂,如果选择冲剂,抓取装置5会将接药杯从接药杯支架309中取出,放入自动封口机401的杯座内,此时控制系统6控制定量泵405开始工作,将所需温度的水通过管路406流进接药杯内一定量,自动封口机401将接药杯封好,抓取装置5将接药杯放入接药槽9内,直接取出即可;如果选择不冲剂,抓取装置5会将接药杯放入自动封口机401的杯座内,自动封口机401将接药杯封好,抓取装置5再将接药杯放入接药槽9内。根据不同药物配方的不同需求,可以通过冲剂装置4内的流速传感器404控制热水流速,并通过电磁阀403控制流量。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1