一种蛇骨单元、蛇骨、内窥镜及弯曲控制方法与流程
1.本发明涉及一种内窥镜,尤其是涉及一种蛇骨单元、蛇骨、内窥镜及弯曲控制方法。
背景技术:
2.内窥镜是一种常用的医疗器械,经人体的自然孔道或经手术做的小切口进入人体内,使用时将内窥镜导入预检查的器官,可直接窥视有关部位的变化。现有的内窥镜一般是通过钢丝绳结构控制蛇骨单元,实现插入部在径向两个方向的对称弯曲,比如向左弯曲或者向右弯曲。
3.这种结构存在一定的缺陷,一方面,人体内的组织结构复杂,尤其是在一些复杂的肠道中,弯曲结构复杂,所以现有的内窥镜的插入部无法顺利地进入人体中那些弯曲结构复杂的部位,强行进入会对患者造成很不好的体验,甚至对患者身体造成损害。另一方面,在蛇骨上需要设置供钢丝绳贯穿的孔,所需的制作工艺复杂,生产成本高。
技术实现要素:
4.为了解决上述问题,本发明第一方面的目的是,提供了一种蛇骨单元,所述蛇骨单元,包括蛇骨单元本体,所述蛇骨单元本体呈管状,所述蛇骨单元本体沿第一径向方向设有两凸耳,所述凸耳用于与另一蛇骨单元连接;所述蛇骨单元本体上位于所述两凸耳之间设有容纳腔,所述容纳腔用于容纳磁性体。
5.进一步地,所述容纳腔包括沿所述蛇骨单元本体轴向延伸的第一容纳腔和第二容纳腔;所述第一容纳腔和第二容纳腔分别位于所述蛇骨单元本体沿第二径向方向的两端;所述第二径向方向与所述第一径向方向垂直。
6.进一步地,所述第一容纳腔和第二容纳腔设置于所述蛇骨单元本体的外壁上,所述第一容纳腔和第二容纳腔均连通所述蛇骨单元的两端面。
7.进一步地,所述容纳腔包括第三容纳腔、第四容纳腔、第五容纳腔和第六容纳腔;
8.所述第三容纳腔和所述第四容纳腔位于所述蛇骨单元本体沿第二径向方向的一端,所述第三容纳腔和所述蛇骨单元本体的一侧端面连通,所述第四容纳腔和所述蛇骨单元本体的另一侧端面连通;
9.所述第五容纳腔和所述第六容纳腔位于所述蛇骨单元本体沿第二径向方向的另一端,所述第五容纳腔和所述蛇骨单元本体的一侧端面连通,所述第六容纳腔和所述蛇骨单元本体的另一侧端面连通;
10.所述第二径向方向与所述第一径向方向垂直。
11.进一步地,所述容纳腔包括第七容纳腔、第八容纳腔、第九容纳腔和第十容纳腔;
12.所述第七容纳腔和第十容纳腔分别位于所述蛇骨单元本体沿第三径向方向的两端;所述第八容纳腔和第九容纳腔分别位于所述蛇骨单元本体沿第四径向方向的两端;所述第二径向方向与所述第一径向方向垂直,所述第三径向方向和所述第四径向方向相对于
所述第二径向方向对称。
13.本发明第二方面的目的是,提供了一种蛇骨,所述蛇骨包括多个首尾依次连接的前述的蛇骨单元,相邻两个蛇骨单元之间可相对转动。
14.本发明第三方面的目的是,提供了一种内窥镜,所述内窥镜包括手柄部、插入部,所述插入部设有前述的蛇骨,每个所述蛇骨单元的容纳腔内均容纳有磁性体,所述磁性体为可变极性磁性体。
15.进一步地,所述手柄部设有控制组件,所述磁性体为电磁体,每个所述磁性体均与所述控制组件电连接。
16.进一步地,所述磁性体与所述容纳腔之间为过盈配合。
17.本发明第四方面的目的是,提供了一种前述内窥镜的弯曲控制方法,所述弯曲控制方法通过改变相邻磁性体相对面的磁性来控制蛇骨单元的转动。
18.与现有技术相比,本发明的有益技术效果为:
19.1)本发明中的蛇骨单元可以采用一体成型的方式制成,加工工艺简单。同时,本发明中的蛇骨单元不包括钢丝绳贯穿结构。即不同于现有技术中通过钢丝绳驱动蛇骨单元转动的方式,本发明所提供的蛇骨及内窥镜是通过相邻两蛇骨单元的磁性体的相吸或者相斥来实现相邻两蛇骨单元之间的相对转动。通过控制相邻两蛇骨单元容纳腔内磁性体的磁性可以实现蛇骨结构沿多个方向弯曲,从而使得内窥镜在使用时,可以更顺利地进入患者的病灶位置,减小患者的痛苦,提高患者体验。
20.2)本发明中给出了蛇骨单元中容纳腔的多种布置形式,如在蛇骨单元第二径向方向的两端各布置一个容纳腔,在蛇骨单元第二径向方向的两端各布置两个容纳腔同轴的容纳腔,或者在蛇骨单元第二径向方向的两端各布置两个对称的容纳腔。通过多种布置形式的容纳腔,可以为相邻两蛇骨单元的相对转动提供足够大小的吸力或者斥力,还可以避免其中某一磁性体发生故障时,导致蛇骨单元无法转动的情形。
附图说明
21.为了更清楚地说明本发明实施例的技术方案,下面将对本发明实施例或现有技术描述中所需要使用的附图作简单的介绍,显而易见地,下面所描述的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
22.图1是本发明一个实施例中设有第一容纳腔和第二容纳腔的蛇骨单元结构示意图;
23.图2是本发明一个实施例中设有第三容纳腔、第四容纳腔、第五容纳腔、第六容纳腔的蛇骨单元结构示意图;
24.图3是本发明一个实施例中设有第七容纳腔、第八容纳腔、第九容纳腔、第十容纳腔的蛇骨单元结构示意图;
25.图4是本发明一个实施例中蛇骨结构示意图;
26.图5是图4所示蛇骨结构与磁性体装配后的结构示意图;
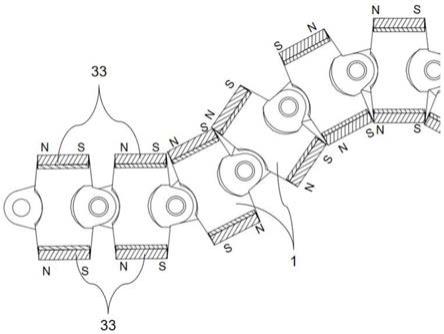
27.图6是图5所示蛇骨产生任意弯曲后的结构示意图;
28.图7是图6所示蛇骨结构部分剖视图;
29.图8是本发明一个实施例中内窥镜结构示意图;
30.图中:1
‑
蛇骨单元,11
‑
蛇骨单元本体,12
‑
凸耳,13
‑
容纳腔,131
‑
第一容纳腔,132
‑
第二容纳腔,133
‑
第三容纳腔,134
‑
第四容纳腔,135
‑
第五容纳腔,136
‑
第六容纳腔,137
‑
第七容纳腔,138
‑
第八容纳腔,139
‑
第九容纳腔,1310
‑
第十容纳腔,2
‑
蛇骨,3
‑
内窥镜,31
‑
手柄部,32
‑
插入部,33
‑
磁性体。
具体实施方式
31.以下的说明提供了许多不同的实施例、或是例子,用来实施本发明的不同特征。以下特定例子所描述的元件和排列方式,仅用来精简的表达本发明,其仅作为例子,而并非用以限制本发明。
32.现有技术中,常规的内窥镜包括操作部(又称为手柄)和插入部。手柄部用于操控插入部进入人体。其中,插入部可分为模组段、蛇骨段、被动弯曲段等。在蛇骨段中穿设有两根(或者四根)钢丝绳,钢丝绳与手柄部的转轮连接,通过转轮的转动,可以使得其中一根的钢丝绳收紧,另一根钢丝绳松弛,从而使得内窥镜的蛇骨段朝着钢丝绳收紧的一侧转动;改变转轮的转动方向,可以使得蛇骨段朝着相反的方向转动。
33.可以看出,这种通过钢丝绳控制蛇骨段弯曲的方式,只能实现蛇骨段向着有限的方向转动(只能向左或者向右)。而对于人体组织结构比较复杂的一些部位,如肠道,其内部弯曲结构复杂,常存在一些s形或者更复杂的弯曲部位。现有技术中内窥镜插入部这种比较单一的弯曲形式不能很好地适应人体内部环境,无法顺利地进入人体中那些弯曲结构复杂的部位,若强行进入会对患者造成很不好的体验,甚至对患者身体造成损害。同时,因需要在蛇骨单元的内壁上设置供钢丝绳贯穿的孔,所需的制作工艺复杂,生产成本高。
34.鉴于此,本发明的一个实施例,如图1至图3所示,提供了一种蛇骨单元1,所述蛇骨单元1,包括蛇骨单元本体11,所述蛇骨单元本体11呈管状,所述蛇骨单元本体11沿第一径向方向设有两凸耳12,所述两凸耳12用于与另一蛇骨单元1连接;所述蛇骨单元本体11上位于所述两凸耳12之间设有容纳腔13,所述容纳腔13用于容纳磁性体33。
35.上述方案中,第一径向方向指的是蛇骨单元1一侧端面上两凸耳12所在的径向方向。
36.相比于现有技术,由于上述方案中的蛇骨单元1,不需要额外的在蛇骨单元的内壁上加工用于贯穿钢丝绳的通孔,因此,可以采用一体成型的方式制成,加工工艺简单。
37.同时,上述方案中的蛇骨单元1不包括钢丝绳贯穿结构。即不同于现有技术中通过钢丝绳驱动蛇骨单元1转动的方式,本实施例中是通过相邻两蛇骨单元1的磁性体33的相吸或者相斥来实现相邻两蛇骨单元1之间的相对转动。这种驱动方式的优点在于,通过控制相邻两蛇骨单元1容纳腔13内磁性体33的磁性可以实现蛇骨结构沿多个方向弯曲,可以更好地适应实际应用需求。
38.优选地,所述蛇骨单元1为非导电材质;优选地,所述容纳腔13的形状与所述磁性体33的形状相适应。
39.在本发明的一个实施例中,如图1所示,所述容纳腔13包括沿所述蛇骨单元本体11轴向延伸的第一容纳腔131和第二容纳腔132;所述第一容纳腔131和第二容纳腔132分别位于所述蛇骨单元本体11沿第二径向方向的两端;所述第二径向方向与所述第一径向方向垂
直。
40.上述方案中,在所述蛇骨单元本体11沿第二径向方向的两端均设有容纳腔13,即第一容纳腔131和第二容纳腔132,优选地,以蛇骨单元本体11的第一径向方向为对称轴,第一容纳腔131和第二容纳腔132相对称布置。
41.如图7所示,在实现相邻两蛇骨单元1之间的相对转动时,可以将相邻两蛇骨单元1的两第一容纳腔131内的磁性体33相对面设置为相斥,两第二容纳腔132中的磁性体33相对面的磁性设置为异性。如此,可以加大其中一蛇骨单元1相对于另一蛇骨单元1转动时所需要的磁力,便由两组磁性体33所提供的吸力或斥力来驱动蛇骨单元1转动到预定角度,避免因其中某一容纳腔13中磁性体33磁力不足而导致蛇骨单元1无法转动到预定角度的情况。
42.进一步地,所述第一容纳腔131和第二容纳腔132设置于所述蛇骨单元本体11的外壁上,所述第一容纳腔131和第二容纳腔132均连通所述蛇骨单元1的两端面。
43.现有技术中,内窥镜插入部的前端部设有摄像模组以及照明模组,其通过图像信号传输线和电信号传输线与手柄部连接。因此,内窥镜使用过程中,内窥镜插入部内的图像信号传输线和电信号传输线是处于通电状态的,上述通电状态的图像信号传输线和电信号传输线会产生干扰磁场。
44.上述方案中,通过将磁性体33设置于蛇骨单元本体11的外壁,来减小上述干扰磁场对第一容纳腔131/第二容纳腔132内磁性体的影响。进一步地,还可以在所述蛇骨单元本体11的内壁设置屏蔽膜,以进一步隔离其干扰磁场的影响。
45.进一步地,为了保证相邻两蛇骨单元1的容纳腔13中的两磁性体33间的磁力不被其他组件影响(如两磁性体33中间包含其他结构时,导致两磁性体33之间的吸引力不足),优选地,所述第一容纳腔131和第二容纳腔132均连通所述蛇骨单元1的两端面;从而使得相邻两蛇骨单元1上的磁性体33的相对面直接相对。
46.在本发明的一个实施例中,如图2所示,所述容纳腔13包括第三容纳腔133、第四容纳腔134、第五容纳腔135和第六容纳腔136;
47.所述第三容纳腔133和所述第四容纳腔134位于所述蛇骨单元本体11沿第二径向方向的一端,所述第三容纳腔133和所述蛇骨单元本体11的一侧端面连通,所述第四容纳腔134和所述蛇骨单元本体11的另一侧端面连通;
48.所述第五容纳腔135和所述第六容纳腔136位于所述蛇骨单元本体11沿第二径向方向的另一端,所述第五容纳腔135和所述蛇骨单元本体11的一侧端面连通,所述第六容纳腔136和所述蛇骨单元本体11的另一侧端面连通;
49.所述第二径向方向与所述第一径向方向垂直。
50.上述方案中,给出了设置于蛇骨单元1上的容纳腔13的另一实施例。即在蛇骨单元1第二径向方向的两端分别设置有两个容纳腔(一端为第三容纳腔133和所述第四容纳腔134,一端为第五容纳腔135和第六容纳腔136),两个容纳腔分别位于蛇骨单元本体11靠近两端面处。相比于在第二径向单元的一端只设置一个容纳腔的方案中,蛇骨单元1两端面的磁性只能是相反的磁性,本方案中这种在第二径向方向的一端设置两个容纳腔的好处是,本方案可以实现各蛇骨单元1两端磁性的独立性。即对于某一蛇骨单元1两端的磁性(实质为蛇骨单元1上两端的磁性体33靠近蛇骨单元1端面侧的磁性),可以同时为n极,也可以同时为s极,还可以一端为n极一端为s极。由此,本方案所述蛇骨单元1组成的蛇骨可以实现更
为复杂形状的弯曲形态。
51.在本发明的一个实施例中,如图3所示,所述容纳腔13包括第七容纳腔137、第八容纳腔138、第九容纳腔139和第十容纳腔1310;
52.所述第七容纳腔137和第十容纳腔1310分别位于所述蛇骨单元本体11沿第三径向方向的两端;所述第八容纳腔138和第九容纳腔139分别位于所述蛇骨单元本体11沿第四径向方向的两端;所述第二径向方向与所述第一径向方向垂直,所述第三径向方向和所述第四径向方向相对于所述第二径向方向对称。
53.上述方案中,给出了设置于蛇骨单元1上的容纳腔11的另一实施例。即在蛇骨单元1两凸耳12的上侧设置两个容纳腔(即第七容纳腔137和第十容纳腔1310),两容纳腔相对于第二径向方向对称(如第七容纳腔137和第一径向方向的夹角为120
°
,第十容纳腔1310和第一径向方向的夹角为60
°
),在蛇骨单元1两凸耳12的下侧设置两个容纳腔(即第八容纳腔138和第九容纳腔139),两容纳腔相对于第二径向方向对称(如第七容纳腔137和第一径向方向的夹角为
‑
120
°
,第十容纳腔1310和第一径向方向的夹角为
‑
60
°
)。
54.上述方案,通过在蛇骨单元1两凸耳12的两侧分别设置两个容纳腔,如此便有四组磁性体33提供的吸力或者斥力来驱动相邻两蛇骨单元1的相对转动,从而可以加大其中一蛇骨单元1相对于另一蛇骨单元1转动时所需要的磁力,保证蛇骨单元1可以转动到预定角度,避免因其中某一容纳强中磁性体33磁力不足而导致蛇骨单元1无法转动到预定角度。
55.在本发明的另一个实施例中,如图4至图7所示,提供了一种蛇骨2,所述蛇骨2包括多个首尾依次连接的前述的蛇骨单元1,相邻两个蛇骨单元1之间可相对转动。
56.相比于现有技术中,通过钢丝绳驱动蛇骨单元1转动的方式,上述方案中的蛇骨2通过相邻两蛇骨单元1容纳腔13中磁性体33的磁力驱动两蛇骨单元1的相对转动。本实施例所述的蛇骨2可以呈现更为复杂的弯曲形态。
57.在本发明的另一个实施例中,提供了一种内窥镜3,所述内窥镜3包括手柄部31、插入部32,所述插入部32设有前述的蛇骨2,每个所述蛇骨单元1的容纳腔13内均容纳有磁性体33,所述磁性体33为可变极性磁性体。
58.上述方案中,所提供的内窥镜3中的蛇骨2,通过相邻两蛇骨单元1容纳腔13中磁性体33的磁力驱动两蛇骨单元1的相对转动,可以使蛇骨2呈现更为复杂的弯曲形态。从而使得内窥镜3在使用时,可以更顺利地进入患者的病灶位置,减小患者的痛苦,提高患者体验。
59.进一步地,所述手柄部31设有控制组件(未图示),所述磁性体33为电磁体,每个所述磁性体33均与所述控制组件电连接。
60.上述方案中,给出了一种磁性体33的具体实施例,即所述磁性体33为电磁体,将蛇骨单元1上所有的磁性体33通过导线电连接至设置于手柄31中的控制组件上,通过改变蛇骨单元1上每一电磁体中电流的方向,从而改变电磁体两端的磁性,进而使得相邻两蛇骨单元1发的相邻两磁性体33之间相吸或者相斥,最终实现蛇骨单元1弯曲角度的变化。
61.进一步地,所述磁性体33与所述容纳腔13之间为过盈配合。
62.上述方案中,通过将磁性体33与容纳腔13之间为过盈配合,从而使得磁性体33在装入容纳腔13后可以固定于所述容纳腔13内。
63.在本发明的另一个实施例中,提供了一种前述内窥镜3的弯曲控制方法,所述弯曲控制方法通过改变相邻磁性体33相对面的磁性来控制蛇骨单元1的转动,
64.实际使用中,操作者可以预先获取蛇骨2的弯曲形态需求,手柄中的控制组件根据所述弯曲形态需求,计算出各蛇骨单元1中各磁性体33各端的磁性,并控制所述蛇骨2中各磁性体33的磁性,使其与所述计算结果一致,进而使所述蛇骨呈现出需求的弯曲形态。
65.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1