能够自动回退的辅助装置的制作方法
1.本公开涉及一种用于将医疗器械施加至宿主的能够自动回退的辅助装置。
背景技术:
2.出于临床诊断或个人健康监测的需要,例如对于糖尿病患者而言,很有必要平日实时、连续监测组织液的葡萄糖浓度,以及时通过例如调节饮食或施加药物治疗等方式来调节葡萄糖浓度,从而减少和降低由于非正常的葡萄糖浓度而引发的并发症的发生。
3.目前,用户通常使用能够插入皮肤以下且能够与组织液中的葡萄糖发生反应的葡萄糖传感器以及敷贴在皮肤上且与葡萄糖传感器连接的电子装置来监测组织液中的葡萄糖浓度。为了将葡萄糖传感器插入皮肤以下并且将电子装置敷贴在皮肤上,通常需要借助插入装置。具体而言,插入装置可以包括能够刺入皮肤的针,通过针将葡萄糖传感器插入皮肤以下,而后将针与葡萄糖传感器分离并从皮肤中取出。
4.然而,在上述现有技术中,针从皮肤中取出的过程需要借助于人力驱动。在这种情况下,由于针从皮肤中取出的时机等可能难以得到较为精确的控制,一方面可能会造成从皮肤中取出的操作较为繁琐,另一方面也可能造成葡萄糖传感器未被插入到期望的位置。
技术实现要素:
5.本公开有鉴于上述现有技术的状况而完成,其目的在于提供一种能够使穿刺构件自动回退、并且能够更准确地控制穿刺构件离开宿主的时机的辅助装置。
6.为此,本公开提供一种能够自动回退的辅助装置,是用于将医疗器械置于宿主的皮下的辅助装置,所述辅助装置包括壳体、辅助机构、驱动机构、以及触发机构,所述壳体包括操作时与宿主接近的近端和与宿主远离的远端,所述辅助机构包括配置为可相对于所述壳体移动的运动主体、设置于所述运动主体且配置为可接收并容纳所述医疗器械的容纳部、设置于所述运动主体的保持部、以及可释放地保持于所述保持部且配置为被释放时可相对于所述容纳部移动的穿刺构件,所述驱动机构配置为以朝向所述远端的方式向所述穿刺构件施加作用,所述触发机构配置为使所述穿刺构件被所述保持部释放,当所述运动主体靠近所述近端时,容纳在所述容纳部中的医疗器械通过所述穿刺构件至少部分地被置于宿主的皮下,并且所述触发机构使所述穿刺构件被释放且所述驱动机构朝向所述远端驱动所述穿刺构件以离开宿主。
7.在本实施方式所涉及的辅助装置中,壳体包括操作时与宿主接近的近端和与宿主远离的远端,配置为可接收并容纳医疗器械的容纳部、以及配置为可相对于容纳部移动的穿刺构件设置于运动主体,当运动主体靠近近端时医疗器械被至少部分地置于宿主的皮下,并且穿刺构件被释放且被朝向远端驱动以离开宿主。在这种情况下,当医疗器械通过穿刺构件而被置于宿主的皮下,通过触发机构和驱动机构能够使穿刺构件自动离开宿主,由此能够提供一种穿刺构件自动回退的机制、并且能够更准确地控制穿刺构件离开宿主的时机。
8.另外,在本实施方式所涉及的辅助装置中,可选地,所述穿刺构件包括配置为可与所述保持部可释放地互锁的锁止部。由此,穿刺构件能够通过锁止部与保持部的配合而可释放地保持于保持部。
9.另外,在本实施方式所涉及的辅助装置中,可选地,所述保持部与所述锁止部通过搭扣、钩、闩、或销中的至少一种结构以可释放地互锁。在这种情况下,保持部与锁止部通过搭扣、钩、闩、或销中的至少一种结构以可释放地互锁,由此能够提供一种便于释放的互锁方式。
10.另外,在本实施方式所涉及的辅助装置中,可选地,所述触发机构配置为可使所述保持部与所述锁止部分离以使所述穿刺构件被释放。由此,能够通过触发机构来方便地释放穿刺构件。
11.另外,在本实施方式所涉及的辅助装置中,可选地,所述壳体包括第一外壳和可装配于所述第一外壳的第二外壳,所述第二外壳具有相互连通的第一限定机构和第二限定机构,所述第二限定机构配置为限定所述医疗器械的敷贴位置,所述辅助机构装配于所述第一限定机构并且所述运动主体可沿着所述第一限定机构移动。在这种情况下,通过第二外壳的第一限定机构来限定运动主体的移动、并且通过第二外壳的第二限定机构来限定医疗器械的敷贴位置,由此能够有利于更准确地将医疗器械置于宿主的皮下。
12.另外,在本实施方式所涉及的辅助装置中,可选地,所述运动主体具有靠近所述远端的第一底部、靠近所述近端的第二底部、连接所述第一底部与所述第二底部的侧壁、以及形成在所述第一底部、所述第二底部与所述侧壁之间的中空部,所述容纳部设置于所述第二底部并且当所述穿刺构件被释放时可沿着所述中空部移动。在这种情况下,通过第一底部、第二底部、以及侧壁来形成中空部并将容纳部设置于第二底部、将穿刺构件设置于中空部,由此能够便于使穿刺构件被释放时相对于容纳部移动。
13.另外,在本实施方式所涉及的辅助装置中,可选地,所述穿刺构件包括具有沟槽的尖锐物、以及用于支承所述尖锐物的支承座,所述医疗器械可全部或部分地置于所述尖锐物的沟槽中,所述驱动机构配置为向所述支承座施加作用。在这种情况下,通过将医疗器械全部或部分地置于尖锐物的沟槽中,由此能够便于通过穿刺构件而将医疗器械至少部分地置于宿主的皮下。
14.另外,在本实施方式所涉及的辅助装置中,可选地,所述医疗器械包括可置于宿主的皮下的传感器、以及与所述传感器连接并可敷贴于宿主的体表的敷贴部。在这种情况下,通过可置于宿主的皮下的传感器并且通过可敷贴于宿主的体表的敷贴部来与传感器连接,由此能够便于获取组织液的分析物信息。
15.另外,在本实施方式所涉及的辅助装置中,可选地,当所述运动主体沿着所述第一限定机构移动时,所述容纳部沿着所述第二限定机构移动。在这种情况下,通过令运动主体沿着第一限定机构移动并且容纳部沿着第二限定机构移动,由此能够更准确地将容纳在容纳部内的医疗器械在期望的位置被置于宿主的皮下。
16.另外,在本实施方式所涉及的辅助装置中,可选地,所述第一限定机构限制所述运动主体在沿着所述辅助装置的中心轴线的方向上的行程。在这种情况下,通过第一限定机构来限制运动主体在沿着辅助装置的中心轴线的方向上的行程,由此能够更加准确地将容纳在容纳部内的医疗器械推送预定距离,从而能够更加准确地将医疗器械置于宿主的皮
下。
17.另外,在本实施方式所涉及的辅助装置中,可选地,在沿着所述辅助装置的中心轴线的方向上进行投影,所述容纳部与所述第一限定机构的壁至少部分重合、并且所述运动主体靠近所述远端的一端与所述第一限定机构的壁至少部分重合。在这种情况下,通过使容纳部和运动主体与第一限定机构的壁至少部分重合,由此能够在结构简化的情况下有效限制运动主体沿着第一限定机构移动的行程。
18.另外,在本实施方式所涉及的辅助装置中,可选地,所述运动主体具有大致沿着所述辅助装置的中心轴线的方向的切口。在这种情况下,通过在运动主体上设置沿着辅助装置的中心轴线的方向的切口,由此能够便于对设置在运动主体的中空部内的穿刺构件施加作用。
19.另外,在本实施方式所涉及的辅助装置中,可选地,在所述第一限定机构的内壁上设置有经由所述切口而朝向所述辅助装置的中心轴线突出的凸起。在这种情况下,当运动主体沿着第一限定机构移动时,设置在第一限定机构的内壁上的凸起能够经由运动主体的切口而对穿刺构件施加作用,由此能够在结构简化的情况下提供一种对穿刺构件的触发机制。
20.另外,在本实施方式所涉及的辅助装置中,可选地,所述运动主体配置为抑止所述穿刺构件的旋转。在这种情况下,通过抑止穿刺构件在施加过程中发生不期望的旋转,由此能够提高在医疗器械施加过程中的用户体验。
21.另外,在本实施方式所涉及的辅助装置中,可选地,所述尖锐物与所述支承座配置为可可拆卸地装配结合。由此,能够便于对尖锐物另行灭菌。
22.另外,在本实施方式所涉及的辅助装置中,可选地,所述锁止部设置于所述支承座,并且所述锁止部包括大致沿着所述辅助装置的中心轴线的方向延伸的臂、以及与该臂联动且大致沿着正交于所述辅助装置的中心轴线的方向背向所述辅助装置的中心轴线突出的凸起。在这种情况下,当穿刺构件被置于运动主体的中空部内时,通过锁止部与运动主体的切口进行搭接,由此能够在结构简化的情况下对穿刺构件进行保持。
23.另外,在本实施方式所涉及的辅助装置中,可选地,当所述穿刺构件被保持时,所述锁止部的凸起经过所述切口。在这种情况下,通过将锁止部的凸起搭接于运动主体的切口,由此能够在结构简化的情况下对锁止部进行保持。
24.另外,在本实施方式所涉及的辅助装置中,可选地,当所述穿刺构件被释放时,所述锁止部的臂被朝向所述辅助装置的中心轴线挤压并且所述锁止部的凸起离开所述切口。由此,能够操作简便地对锁止部进行释放。
25.另外,在本实施方式所涉及的辅助装置中,可选地,所述穿刺构件的支承座设置在所述中空部内,所述容纳部设置于所述第二底部,所述第二底部具有贯通孔,并且所述尖锐物经过所述第二底部的贯通孔。在这种情况下,通过将尖锐物设置为经过第二底部的贯通孔能够使尖锐物与容纳在容纳部内的医疗器械相接合,由此能够便于通过穿刺构件而将医疗器械至少部分地置于宿主的皮下。
26.此外,在本实施方式所涉及的辅助装置中,可选地,当所述穿刺构件被保持时,所述支承座与所述第一底部的间距不小于所述尖锐物突出于所述容纳部的长度。在这种情况下,通过将支承座与第一底部的间距设置为不小于尖锐物突出于容纳部的长度能够为穿刺
构件离开宿主提供移动空间,由此能够减少穿刺构件对宿主产生不期望的伤害。
27.根据本公开,能够提供一种穿刺构件自动回退的机制、并且能够更准确地控制穿刺构件离开宿主的时机。
附图说明
28.图1是示出了本实施方式示例所涉及的医疗器械和辅助装置的应用概况。
29.图2是示出了本实施方式示例所涉及的医疗器械的第一视角的示意图。
30.图3是示出了本实施方式示例所涉及的医疗器械的第二视角的示意图。
31.图4是示出了本实施方式示例所涉及的医疗器械的电子装置的框图示意图。
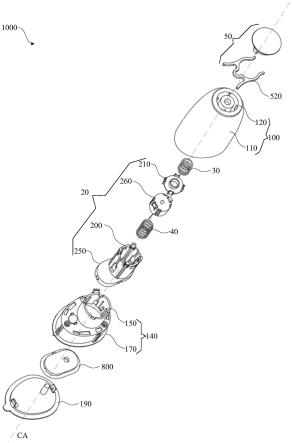
32.图5a是示出了本实施方式示例所涉及的辅助装置的整体外观示意图;图5b是示出了本实施方式示例所涉及的辅助装置的分解示意图。
33.图6a是示出了本实施方式示例所涉及的第一外壳的周部的立体示意图;图6b是示出了本实施方式示例所涉及的第一外壳的端部的第一视角的立体示意图。
34.图7a是示出了本实施方式示例所涉及的第一保持部、运动主体、与第一驱动机构的分解示意图;图7b是示出了本实施方式示例所涉及的运动主体被保持时的剖面示意图;图7c是示出了本实施方式示例所涉及的运动主体被释放时的剖面示意图。
35.图8a是示出了本实施方式示例所涉及的第一外壳的端部与第一触发机构的分解示意图;图8b是示出了本实施方式示例所涉及的第一外壳的端部的第二视角的立体示意图;图8c是示出了本实施方式示例所涉及的第一外壳的端部的仰视示意图;图8d是示出了本实施方式示例所涉及的第一外壳的端部的俯视示意图;图8e是示出了本实施方式示例所涉及的第一触发机构的立体示意图;图8f是示出了本实施方式示例所涉及的第一触发机构的仰视示意图;图8g是示出了本实施方式示例所涉及的第一触发机构与端部装配前的剖面示意图;图8h是示出了本实施方式示例所涉及的第一触发机构与端部装配后的剖面示意图;
36.图8i是示出了本实施方式示例所涉及的第一保持部被第一触发机构触发前的剖面示意图;图8j是示出了本实施方式示例所涉及的第一保持部被第一触发机构触发后的剖面示意图。
37.图9a是示出了第二外壳与辅助机构的第一视角的分解示意图;图9b是示出了第二外壳与辅助机构的第二视角的分解示意图;图9c是示出了辅助机构装配至第二外壳的剖面示意图;图9d是示出了本实施方式示例所涉及的盖的示意图。
38.图10a是示出了本实施方式示例所涉及的运动主体与穿刺构件的第一视角的分解示意图;图10b是示出了本实施方式示例所涉及的运动主体与穿刺构件的第二视角的分解示意图;图10c是示出了本实施方式示例所涉及的穿刺构件被保持时的剖面示意图;图10d是示出了本实施方式示例所涉及的穿刺构件被释放时的剖面示意图;图10e是示出了本实施方式示例所涉及的运动主体与穿刺构件预装配时的剖面示意图。
39.图11a是示出了本实施方式示例所涉及的穿刺构件的分解示意图;
40.图11b是示出本实施方式示例所涉及的穿刺构件的装配示意图;图11c是示出了本实施方式示例所涉及的针状部的放大示意图。
具体实施方式
41.以下,参考附图,详细地说明本公开的优选实施方式。在下面的说明中,对于相同的部件赋予相同的符号,省略重复的说明。另外,附图只是示意性的图,部件相互之间的尺寸的比例或者部件的形状等可以与实际的不同。
42.需要说明的是,本公开中的术语“包括”和“具有”以及它们的任何变形,例如所包括或所具有的一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可以包括或具有没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
43.本公开的实施方式涉及一种医疗器械的辅助装置,其可以用于将医疗器械全部或部分地置于宿主的皮下。通过本实施方式所涉及的辅助装置,能够有助于将医疗器械在期望的位置被置于宿主的皮下。
44.本实施方式所涉及的辅助装置还可以称为例如助推装置、运送装置、植入装置、敷贴装置、施加装置等。需要说明的是,各名称是为表示本实施方式所涉及的用于将医疗器械施加至宿主的装置,并且不应当理解为限定性的。
45.图1是示出了本实施方式示例所涉及的医疗器械800和辅助装置1000的应用概况。在本实施方式中,医疗器械800可经由辅助装置1000而被施加至宿主并被施加至期望的位置,宿主可以通过被施加至自身的医疗器械800来获取生理信息。
46.另外,本公开还提供一种监测系统,监测系统可以包括本实施方式所涉及的可获取宿主的生理信息的医疗器械800、以及可与医疗器械800通信连接的读取设备900(参见图1)。被施加至宿主的医疗器械800可以将所获取的生理信息例如通过无线方式传输至读取设备900,由此能够便于宿主对自身的生理信息进行读取和监测。
47.在一些示例中,医疗器械800可以为传感装置。在一些示例中,医疗器械800可以为分析物传感器装置,其可以基于体液生成体液中特定分析物的信息等,例如与体液中的分析物发生反应并生成分析物信息。在这种情况下,通过传感器与体液中的分析物发生反应,由此能够便于获取体液中的分析物信息。
48.在本实施方式中,分析物传感器装置所针对的分析物可以为葡萄糖、乙酰胆碱、淀粉酶、胆红素、胆固醇、绒毛膜促性腺激素、肌酸激酶、肌酸、肌酸酐、dna、果糖胺、谷氨酰胺、生长激素、激素、酮体、乳酸盐、氧、过氧化物、前列腺特异性抗原、凝血酶原、rna、促甲状腺激素或肌钙蛋白中的一种或多种。
49.以下,以葡萄糖作为分析物为例,对本实施方式示例所涉及的医疗器械800进行说明。需要说明的是,针对其他的分析物,本领域技术人员基于葡萄糖所采用医疗器械800稍加改动便能够对其他分析物进行分析。
50.图2是示出了本实施方式示例所涉及的医疗器械800的第一视角的示意图。图3是示出了本实施方式示例所涉及的医疗器械800的第二视角的示意图。图4是示出了本实施方式示例所涉及的医疗器械800的电子装置的框图示意图。
51.在一些示例中,医疗器械800可以包括传感器820、连接部840和敷贴部860(参见图2或图3)。传感器820可以可拆卸地装配于敷贴部860。传感器820可以通过连接部840而与敷贴部860连接。在另一些示例中,医疗器械800也可以不包括连接部840,在这种情况下,传感器820可以直接与敷贴部860连接。
52.在一些示例中,传感器820可以被部分或全部地置于宿主的皮下。在一些示例中,传感器820被置于皮下后可以与皮下组织液中的葡萄糖发生反应,以生成宿主的葡萄糖信息。敷贴部860可以敷贴于宿主的体表。在一些示例中,敷贴部860还可以接收传感器820所生成的葡萄糖信息。在一些示例中,敷贴部860还可以为传感器820提供获取生理信息所需的电能。由此,能够有利于传感器820在宿主的皮下进行持续监测。
53.在一些示例中,传感器820可以包括植入部分(未图示)和连接部分(未图示)。植入部分可以被置于宿主的皮下并通过连接部分而与敷贴部860连接。在这种情况下,通过将植入部分置于宿主的皮下并通过连接部分将植入部分与敷贴部860连接,由此能够便于将所获取的分析物信息传输至外部设备。在一些示例中,连接部分可以经由连接部840而连接于敷贴部860。
54.在一些示例中,传感器820的植入部分可以呈细长状。在一些示例中,植入部分可以为刚性。由此,能够有助于被置于宿主的皮下。在另一些示例中,植入部分也可以为柔性,在这种情况下,能够减小宿主的异物感。在一些示例中,植入部分的长度可以为1mm至10mm,例如1mm、2mm、3mm、4mm、5mm、6mm、7mm、8mm、9mm、或10mm。植入部分被植入到宿主后,其深度可达于真皮层,并位于皮肤的组织间,从而传感器820可以采集组织间液的葡萄糖信息。
55.在一些示例中,植入部分可以包括工作电极(未图示)和对电极(未图示)。在本实施方式中,在工作电极上可以设置有包括葡萄糖酶的传感层,被置于皮下的传感器820可以通过工作电极上的葡萄糖酶与组织液或血液中的葡萄糖发生氧化还原反应,并与对电极形成回路从而产生电流信号,对该电流信号进行分析处理以得到葡萄糖浓度信息。在一些示例中,传感器820所产生的电流信号可以传输至敷贴部860。
56.在一些示例中,植入部分还可以包括参比电极(未图示)。在一些示例中,参比电极可以与组织液或血液形成已知且固定的电势差。在这种情况下,可以通过参比电极与工作电极形成的电势差来测量工作电极与组织液或血液间的电势差。由此,能够更准确地得到工作电极所产生的电压。由此,敷贴部860的电子装置880(稍后描述)可以根据预先设置的电压值自动调节并维持工作电极处电压的稳定,以使测量所得的电流信号能够更准确地反映组织液或血液中的葡萄糖浓度信息。在一些示例中,参比电极的数量可以为一个或多个,例如两个。
57.在一些示例中,连接部840可以大致呈柱状,例如四棱柱状。但本实施方式的示例并不限于此,在其他实施例中,连接部840也可以大致呈三棱柱状、六棱柱状、圆柱状、或半球状等。另外,敷贴部860的接收部(未图示)也可以被形成为与连接部840相匹配的形状以适于接收连接部840。例如,敷贴部860的接收部可以形成为与连接部840的形状相匹配的凹部,连接部840可以与该凹部嵌合。
58.在一些示例中,传感器820可以配置为可拆卸地装配于敷贴部860。在这种情况下,在医疗器械800被容纳至容纳部250之前可对传感器820和敷贴部860分别进行封装,由此能够便于通过不同的方式对传感器820和敷贴部860分别进行灭菌。
59.在一些示例中,敷贴部860配置为可以粘附于宿主的体表。在一些示例中,敷贴部860还可以包括具有粘附性能的粘附片870(参见图2或图3)。敷贴部860可以通过粘附片870而敷贴并固定于宿主的体表。在一些示例中,粘附片870的粘附面可以与敷贴部860靠近宿主的底面大致相等。在另一些示例中,粘附片870的粘附面也可以略大于敷贴部860靠近宿
主的底面。
60.在一些示例中,敷贴部860还可以包括电子装置880(参见图4)。电子装置880可以接收传感器820所生成的葡萄糖信息。在一些示例中,电子装置880还可以进一步对葡萄糖信息进行处理。在另一些示例中,电子装置880也可以将所接收的葡萄糖信息传输至外部设备,例如下文中将要描述的读取设备900。另外,电子装置880还可以为传感器820供电。
61.在一些示例中,电子装置880可以包括电源模块882、开关模块884和处理模块886(参见图4)。电源模块882可以为传感器820和/或处理模块886供电,开关模块884可以控制电源模块882与传感器820和/或处理模块886的通断,处理模块886可以对传感器820所生成的信号(例如,葡萄糖信息)进行处理。
62.另外,在一些示例中,电子装置880还可以包括存储模块888(参见图4)。存储模块888可以将传感器820所生成的信号进行存储。另外,在一些示例中,电子装置880还可以包括通信模块890(参见图4)。通信模块890可以与外部装置(例如,智能终端设备)进行通信。在一些示例中,通信模块890可以为蓝牙模块、nfc模块、wifi模块等。在一些示例中,智能终端设备可以是智能手机、智能手表、平板电脑、计算机等。
63.在一些示例中,电子装置880接收到传感器820所生成的葡萄糖信息后可以即时传输至外部装置。由此能够便于外部装置即时对葡萄糖信息进行处理或显示。在另一些示例中,电子装置880接收到传感器820所生成的葡萄糖信息后也可以先存储在存储模块888中,然后定时传输至外部装置。由此,能够减小因即时传输而产生的功耗。
64.另外,在一些示例中,电子装置880的电源模块882也可以配置为为传感器820提供电能。在一些示例中,当电子装置880处于初始模式时,电源模块882与传感器820之间可以断开,当电子装置880被激发至工作模式时(即,开关模块884处于闭合状态时),电源模块882可以与传感器820连通,从而为传感器820提供电能。
65.在一些示例中,如上所述,敷贴部860可以配置为可通过无线通信方式或有线通信方式与外部设备进行通信。在这种情况下,通过将敷贴部860配置为可与外部设备进行通信,由此能够实时或定时地读取传感器820所获取的分析物信息。在一些示例中,外部设备可以为读取设备900。
66.在一些示例中,如上所述,医疗器械800可以与读取设备900通信连接。在一些示例中,读取设备900可以是具有通信功能的显示器。在一些示例中,读取设备900的通信功能可以通过无线通信方式或有线通信方式来实现。无线通信方式可以为蓝牙、nfc、wifi等。有线通信方式可以为usb、光纤等。
67.在另一些示例中,读取设备900也可以是安装有与医疗器械800相匹配的应用程序的智能终端。智能终端可以为笔记本计算机、平板计算机、智能电话等。
68.如上所述,本实施方式所涉及的医疗器械800可以通过辅助装置1000被施加至宿主。以下,结合附图,对本实施方式所涉及的辅助装置1000进行详细说明。
69.图5a是示出了本实施方式示例所涉及的辅助装置1000的整体外观示意图;图5b是示出了本实施方式示例所涉及的辅助装置1000的分解示意图。在图5a和图5b中,线ca示意性表示辅助装置1000的中心轴线。
70.在本实施方式中,辅助装置1000可以包括可提供移动空间的壳体10、以及配置为可在壳体10的移动空间内进行移动的辅助机构20(参见图5a和图5b)。壳体10可以具有操作
时与宿主接近的近端、以及与宿主远离的远端。辅助机构20可以可释放地保持于壳体10并且可以收纳医疗器械800。辅助机构20可以配置为当被释放时可以相对于壳体10移动并被朝向宿主驱动以将医疗器械800施加至宿主。可以理解的是,在本文中,“近端”可以理解为操作时与宿主接近的一端,“远端”可以理解为操作时与宿主远离的一端。
71.在一些示例中,壳体10可以具有移动空间,辅助机构20可以可释放地保持于壳体10。在一些示例中,当辅助机构20被释放时可以在壳体10的移动空间内进行移动。另外,在一些示例中,壳体10还可以限定医疗器械800在宿主的体表的敷贴位置。
72.在一些示例中,壳体10可以包括第一外壳100和第二外壳140。第一外壳100与第二外壳140装配结合后可以形成有移动空间。第一外壳100可以可释放地保持辅助机构20。第二外壳140可以限定医疗器械800在宿主的体表的敷贴位置并且可以限定辅助机构20的移动路径。辅助机构20被第一外壳100释放后可以沿着第二外壳140所限定的移动路径相对于第二外壳140移动并将医疗器械800施加至第二外壳140所限定的敷贴位置。在本实施方式中,第一外壳100的轴线和第二外壳140的轴线可以大致平行于辅助装置1000的中心轴线ca。
73.在一些示例中,辅助机构20可以包括运动主体200、容纳部250和穿刺构件260(参见图5b)。运动主体200可以被可释放地保持于第一外壳100,并且运动主体200可以配置为当被释放时可沿着第二外壳140所限定的移动路径进行移动。容纳部250可以设置于运动主体200并且可以配置为可接收并容纳医疗器械800,容纳部250可以被朝向第二外壳140所限定的敷贴位置驱动。穿刺构件260可以以穿过容纳部250的方式设置于运动主体200。运动主体200被释放后可以朝向壳体10的近端移动,并且容纳部250和穿刺构件260也朝向壳体10的近端移动,以将容纳在容纳部250内的医疗器械800施加至宿主。在一些示例中,穿刺构件260可以刺入宿主的皮下,从而将医疗器械800至少部分地置于宿主的皮下。
74.另外,在一些示例中,辅助装置1000还可以包括第一驱动机构30(参见图5b)。第一驱动机构30可以配置为以朝向近端的方式向运动主体200施加作用。当运动主体200被释放时,运动主体200可以被第一驱动机构30朝向近端驱动以将容纳在容纳部250内的医疗器械800朝向宿主推送,例如推送至第二外壳140所限定的敷贴位置。另外,通过穿刺构件260可以将医疗器械800至少部分地置于宿主的皮下。
75.在另一些示例中,辅助装置1000也可以不包括第一驱动机构30。在这种情况下,当运动主体200被释放时,运动主体200也可以被人工驱动以朝向近端移动。
76.另外,在一些示例中,穿刺构件260可以可释放地设置于运动主体200,并且穿刺构件260可以配置为当被释放时可以相对于容纳部250进行移动。例如,当穿刺构件260被释放时可以相对于容纳部250而朝向远离宿主的方向移动。
77.另外,在一些示例中,辅助装置1000还可以包括第二驱动机构40(参见图5b)。第二驱动机构40可以配置为以朝向远端的方式向穿刺构件260施加作用。当穿刺构件260被释放时,穿刺构件260可以被第二驱动机构40朝向远端驱动以使穿刺构件260离开宿主。
78.在另一些示例中,辅助装置1000也可以不包括第二驱动机构40。在这种情况下,穿刺构件260可以人工驱动以远离宿主。例如,在一些示例中,穿刺构件260也可以与运动主体200一体式连接,通过朝向远离宿主的方向人工移动运动主体200而使穿刺构件260离开宿主。
79.在一些示例中,如上所述,壳体10可以包括第一外壳100(参见图5a或5b)。在一些示例中,第一外壳100可以包括周部110和端部120(参见图5b)。
80.图6a是示出了本实施方式示例所涉及的第一外壳100的周部110的立体示意图;图6b是示出了本实施方式示例所涉及的第一外壳100的端部120的第一视角的立体示意图。在一些示例中,周部110可以形成为中空且沿着辅助装置1000的中心轴线ca上下贯通的筒状壳(参见图6a),端部120可以以靠近壳体10的远端的方式设置在周部110上。在一些示例中,中心轴线ca可以经过端部120的几何中心。
81.在一些示例中,在第一外壳100的内壁上可以设置有一个或多个肋状凸起,并且在第二外壳140的外壁上可以设置有一个或多个肋状槽。在一些示例中,当第二外壳140装配于第一外壳100时,第一外壳100的一个或多个肋状凸起可以分别嵌入第二外壳140的一个或多个肋状槽。在这种情况下,通过肋状凸起与肋状槽的匹配,由此能够便于对第一外壳100与第二外壳140进行装配。
82.在一些示例中,在周部110的内壁上可以设置有大致沿着中心轴线ca的方向延伸的周部肋112(参见图6a)。在一些示例中,周部肋112的数量可以为多个,例如2个、3个、或4个。在图6a所示的实施例中,周部肋112的数量为4个,周部肋112可以包括周部肋112a、周部肋112b、周部肋112c、以及周部肋112d。在一些示例中,周部肋112可以作为加强肋以有效提高周部110的抗形变能力。在一些示例中,周部肋112还可以作为导引肋以便于第一外壳100与第二外壳140的装配(稍后描述)。
83.在一些示例中,在周部110的内壁上还可以设置有大致与中心轴线ca平行的连接柱114(参见图6a)。在一些示例中,连接柱114的数量可以为多个,例如2个、3个、或4个。在图6a所示的实施例中,连接柱114的数量为3,连接柱114可以包括连接柱114a、连接柱114b、以及连接柱114c。在一些示例中,连接柱114靠近辅助装置1000近端的一端可以为热型柱端,即经由加热可表现为熔融状态并接着可经由冷却凝固。在这种情况下,连接柱114可以与设置在第二外壳140上的孔配合而与第二外壳140装配结合(稍后描述)。
84.在一些示例中,端部120可以包括大致呈圆柱状的端部主体121(参见图6b)。
85.在一些示例中,第一外壳100可以包括第一保持部130。在一些示例中,第一保持部130可以配置为可释放地保持辅助机构20。在一些示例中,第一保持部130可以设置于端部120(参见图6b)。在一些示例中,第一保持部130可以由端部主体121以朝向辅助装置1000的近端的方式沿着中心轴线ca延伸。在这种情况下,当辅助机构20被保持于端部120时,辅助机构20可以位于周部110的中空部内,并且当辅助机构20被释放时,辅助机构20可以大致沿着周部110的轴线方向进行移动。也即,当辅助机构20被释放时,辅助机构20可以大致沿着中心轴线ca进行移动。
86.在一些示例中,第一保持部130可以通过搭扣、钩、闩、或销中的至少一种结构以可释放地与被保持件(例如,稍后将会下文中描述的运动主体200的第一锁止部236)互锁。在这种情况下,第一保持部130与第一锁止部236通过搭扣、钩、闩、或销中的至少一种结构以可释放地互锁,由此能够提供一种便于释放的互锁方式。
87.在一些示例中,第一保持部130的数量可以为一个或多个,例如1、2、3、或4。在图6b所示的实施例中,第一保持部130的数量可以为2,第一保持部130可以包括第一保持部130a和第一保持部130b。第一保持部130a和第一保持部130b可以等距设置在中心轴线ca相对的
两侧(参见图6b)。
88.在一些示例中,第一保持部130可以具有面向远端的表面,并且第一锁止部236可以具有面向近端的表面,当运动主体200被保持时,第一保持部130面向远端的表面与第一锁止部236面向近端的表面可以相互接合。在一些示例中,当运动主体200被释放时,第一保持部130面向远端的表面与第一锁止部236面向近端的表面可以相互分离。
89.在一些示例中,第一保持部130的至少一部分可以呈l字状或钩状。由此,能够便于形成搭扣等结构而与第一锁止部236互锁。
90.在一些示例中,第一保持部130可以包括大致沿着中心轴线ca的方向延伸的臂132、以及与臂132联动且沿着大致正交于中心轴线ca的方向朝向中心轴线ca突出的凸起134(参见图6b)。在一些示例中,第一保持部130的臂132可以由端部主体121向外延伸。在这种情况下,当第一保持部130的凸起134搭接于第一锁止部236时,通过致动臂132以致动凸起134,由此能够方便地使第一保持部130释放第一锁止部236。
91.另外,在一些示例中,在第一保持部130的臂132上可以设有大致沿着中心轴线ca的槽(未图示)。在一些示例中,该槽可以面向中心轴线ca。在这种情况下,第一触发机构50(稍后描述)的致动部504能够沿着该槽移动并致动第一保持部130的臂132。
92.在一些示例中,第一保持部130的臂132可以具有弹性。在一些示例中,第一保持部130的臂132在大致正交于中心轴线ca的方向上可以具有弹性。在一些示例中,第一保持部130的臂132在沿着由远端至近端的方向上可以趋向于朝向中心轴线ca收缩。也就是说,在自然状态下(即未受到外力的状态下),臂132靠近近端的一端与臂132靠近远端的一端两者相较而言,臂132靠近近端的一端与中心轴线ca的距离更近。在另一些示例中,臂132也可以与中心轴线ca大致平行。在一些示例中,当沿着大致正交于中心轴线ca的方向对臂132施加作用时,臂132可以发生枢转。例如,当沿着大致正交于中心轴线ca的方向以背离中心轴线ca的方式对臂132施加作用时,臂132可以发生枢转,以使臂132靠近近端的一端朝着远离中心轴线ca的方向移动。由此,能够操作简便地对被保持件进行释放。
93.在一些示例中,第一保持部130的臂132在沿着由远端至近端的方向上可以朝向中心轴线ca靠拢,并且第一保持部130的凸起134可以朝向中心轴线ca突出。在这种情况下,通过使第一保持部130整体向内收拢能够在内侧(靠近中心轴线ca)保持第一锁止部236,并且通过朝向外侧(远离中心轴线ca)致动第一保持部130能够释放第一锁止部236,由此能够方便对第一锁止部236进行保持和进行释放。
94.在另一些示例中,第一保持部130的臂132在沿着由远端至近端的方向上可以背向中心轴线ca远离,并且第一保持部130的凸起134可以背向中心轴线ca突出。在这种情况下,通过使第一保持部130整体向外分散能够在外侧(远离中心轴线ca)保持第一锁止部236,并且通过朝向内侧(靠近中心轴线ca)致动第一保持部130能够释放第一锁止部236,由此能够方便对第一锁止部236进行保持和进行释放。
95.但本实施方式的示例并不限于此,本公开的构思在于,第一保持部130形成一种搭扣、钩、闩、或销等结构而对被保持件进行保持,并通过使搭扣、钩、闩、或销离开原位置而对被保持件进行释放,基于这样的构思,第一保持部130的臂132和第一保持部130的凸起134在能够形成搭扣的情况下也可以朝向其他方向靠拢或突出。
96.在一些示例中,第一保持部130的凸起134可以具有面向远端的表面。在一些示例
中,凸起134面向远端的表面可以大致正交于中心轴线ca。被保持部件(例如下文中将要描述的运动主体200的第一锁止部236)可以通过搭接/抵接于凸起134面向远端的表面,从而被保持并且不会朝向近端移动。当第一保持部130的臂132被致动以使凸起134面向远端的表面离开原位置,即不再抵接于被保持件时,被保持件将被释放。
97.也就是说,第一保持部130可以为形成在第一外壳100(例如,第一外壳100的端部120)上的搭扣、钩、闩锁、或销等结构。例如,第一保持部130可以形成为指状、一字状、l字状、j字状、z字状等至少可分解为两部分的结构,其至少一部分(例如,连接在第一外壳100上的臂)可以发生枢转,另一部分(例如,由臂向外突出且抵接于被保持件的凸起)可以随着枢转而沿着离开初始位置,从而解除对被保持件的钩、挂、闩、顶、支承等。
98.图7a是示出了本实施方式示例所涉及的第一保持部130、运动主体200、与第一驱动机构30的分解示意图;图7b是示出了本实施方式示例所涉及的运动主体200被保持时的剖面示意图;图7c是示出了本实施方式示例所涉及的运动主体200被释放时的剖面示意图。需要说明的是,在图7b和图7c中主要示意出第一保持部130对运动主体200的保持和释放,并未示意出第一驱动机构30以及其他部件。
99.在一些示例中,如上所述,辅助机构20可以包括运动主体200、以及设置在运动主体200上的容纳部250。运动主体200可以被可释放地保持在第一外壳100上。在一些示例中,运动主体200可以被第一保持部130可释放地保持。运动主体200被释放后可朝向近端被驱动以将容纳在容纳部250内的医疗器械800朝向宿主推送。
100.在一些示例中,在运动主体200与第一外壳100之间可以设有第一驱动部30(参见图7a)。第一驱动部30可以朝向近端的方式向运动主体200施加作用。运动主体200被释放后可被第一驱动部30朝向近端驱动以将容纳在容纳部250内的医疗器械800朝向宿主推送。
101.在另一些示例中,如上所述,辅助装置1000也可以不包括第一驱动部30。在这种情况下,当运动主体200被释放后,运动主体200也可以借助人力而被朝向宿主推送,从而将容纳在容纳部250内的医疗器械800朝向宿主推送。
102.在一些示例中,运动主体200可以包括第一底部210、第二底部220、以及连接第一底部210与第二底部220的侧壁230(参见图7a)。第一底部210可以靠近远端,第二底部220可以靠近近端,并且容纳部250可以设置于第二底部220。
103.在一些示例中,在第一底部210、第二底部220与侧壁230之间可以形成有中空部。在一些示例中,穿刺构件260可以可释放地设置在运动主体200的中空部内。在一些示例中,当穿刺构件260被释放时可沿着运动主体200的中空部移动。在这种情况下,通过第一底部210、第二底部220、以及侧壁230来形成中空部并将容纳部250设置于第二底部220、将穿刺构件260设置于中空部,由此能够便于使穿刺构件260被释放时相对于容纳部250移动。由此,当医疗器械800被施加至宿主后,穿刺构件260被释放并相对于容纳部250移动,从而能够使穿刺构件260离开宿主。
104.在另一些示例中,穿刺构件260也可以固定设置于运动主体200。在这种情况下,当医疗器械800被施加至宿主后,运动主体200可以借助于人力而整体离开宿主,由此穿刺构件260也能够离开宿主。
105.在一些示例中,第一驱动机构30可以设置于第一底部210与第一外壳100之间。在一些示例中,在第一底部210上可以设置有用于对第一驱动机构30进行定位的定位部212
(参见图7a)。在这种情况下,通过定位部212能够更稳定地限定第一驱动机构30对运动主体200施加作用的位置。
106.在一些示例中,第一底部210的定位部212可以为由第一底部210沿着中心轴线ca朝向远端突出的柱状凸起(参见图7a)。在一些示例中,定位部212可以呈圆柱状。在一些示例中,定位部212可以呈实心圆柱状,第一驱动机构30可以套设在定位部212的外周。在另一些示例中,定位部212可以中空圆柱状,第一驱动机构30既可以套设在定位部212的外周,也可以嵌设于定位部212的内周。
107.在一些示例中,第一驱动机构30可以具有储能状态和释能状态,当第一驱动机构30由储能状态切换为释能状态时,第一驱动机构30可以释放能量且以朝向近端的方式对运动主体200施加作用。当运动主体200被保持时,第一驱动机构30可以以储能状态而存在于运动主体200与第一外壳100之间,当运动主体200被释放时,第一驱动机构30可以由储能状态切换为释能状态,并以朝向近端的方式对运动主体200施加作用。
108.在一些示例中,第一驱动机构30可以具有压缩状态和伸展状态,当第一驱动机构30由压缩状态切换为伸展状态时,第一驱动机构30可以释放能量。在一些示例中,第一驱动机构30可以为可压缩的弹性部件。在一些示例中,第一驱动机构30可以为弹簧。在一些示例中,第一驱动机构30的一端可以套设于第一底部210的定位部212。
109.在一些示例中,端部120可以具有定位部122(参见图6b)。在一些示例中,定位部122可以呈圆柱状。在这种情况下,第一驱动机构30的另一端可以套设于定位部122。在一些示例中,定位部122可以呈中空的圆柱状。在这种情况下,第一驱动机构30的另一端可以套设于或嵌设于定位部122。在一些示例中,定位部122可以由至少两段弧形柱组成,例如在图6b所示的实施例中,定位部122可以包括弧形柱122a和弧形柱122b。在这种情况下,第一驱动机构30的另一端可以嵌设于弧形柱122a与弧形柱122b之间。
110.另外,本实施方式的辅助装置1000并不限于此。在一些示例中,辅助装置1000也可以不包括第一驱动机构30。在这种情况下,当运动主体200被释放时,通过人工对运动主体200施加作用也可以使运动主体200朝向近端移动。
111.在一些示例中,运动主体200可以包括配置为可与第一保持部130可释放地互锁的第一锁止部236。由此,运动主体200能够通过第一锁止部236与第一保持部130的配合而可释放地保持于第一保持部130。
112.在一些示例中,第一锁止部236可以设置于运动主体200的侧壁230上。也就是说,在运动主体200的侧壁230上可以设置有第一锁止部236(参见图7a)。第一锁止部236可以与第一保持部130配合而使运动主体200被保持于第一外壳100。
113.在一些示例中,第一锁止部236的数量可以为一个或多个,例如1、2、3、或4。在一些示例中,第一锁止部236的数量与第一保持部130的数量可以相同。在图7a所示的实施例中,第一锁止部236的数量为2,第一锁止部236可以包括第一锁止部236a和第一锁止部236b。
114.在一些示例中,第一锁止部236可以被形成为搭扣结构。具体而言,第一锁止部236可以具有面向近端的表面,第一保持部130可以通过搭接、抵接或接合于该表面而对运动主体200进行保持,并且当第一保持部130可以通过离开该表面而对运动主体200进行释放。也就是说,第一保持部130与第一锁止部236可以形成为互锁的结构,在沿着中心轴线ca的方向上,第一保持部130与第一锁止部236的投影具有重合部分,第一保持部130通过该重合部
分而对第一锁止部236进行保持,并且第一保持部130和/或第一锁止部236可以通过背向对方移动以消除该重合部分,从而使第一保持部130释放第一锁止部236。在一些示例中,第一保持部130和/或第一锁止部236可以以背向对方的方式被致动,从而使第一锁止部236被第一保持部130释放。
115.在一些示例中,第一锁止部236在沿着由近端至远端的方向上可以大致平行于中心轴线ca或背向中心轴线ca远离。在这种情况下,第一锁止部236相较于第一保持部130可以更靠近中心轴线ca,由此,能够便于与向内收拢的第一保持部130配合以进行互锁。
116.在另一些示例中,第一锁止部236在沿着由近端至远端的方向上可以大致平行于中心轴线ca或朝向中心轴线ca靠拢。在这种情况下,第一锁止部236相较于第一保持部130可以更远离中心轴线ca,由此,能够便于与向外分散的第一保持部130配合以进行互锁。
117.在一些示例中,第一锁止部236可以以这样的方式形成,例如由侧壁230的外表面朝向中心轴线ca内凹。在一些示例中,第一锁止部236可以形成为中空结构,例如沿着大致正交于中心轴线ca的方向贯穿侧壁230的通孔。在一些示例中,第一锁止部236还可以以这样的方式形成,即第一底部210的周缘沿着正交于中心轴线ca的方向突出于侧壁230,在这种情况下,第一底部210与侧壁230可以为固定连接。在另一些示例中,第一锁止部236还可以呈倒置的钩状或l状。
118.本实施方式的示例并不限于此,如上所述,本公开的构思在于使第一保持部130与第一锁止部236形成搭扣、钩、闩、或销等结构以进行互锁,在这种情况下,第一锁止部236可以具有面向辅助装置1000的近端的表面,并且通过使第一锁止部236面向近端的表面与第一保持部130面向远端的表面相互接合以使第一保持部130对第一锁止部236进行保持,并且通过使第一锁止部236面向近端的表面与第一保持部130面向远端的表面相互分离以使第一保持部130对第一锁止部236进行释放。
119.参见图7b和图7c,在图7b和图7c所示的实施例中,第一保持部130可以形成为l字状,第一锁止部236形成为设置在侧壁230上的中空结构。当运动主体200被保持时,即如图7b所示,第一保持部130的凸起134位于第一锁止部236的中空结构内,从而对运动主体200进行支承以保持运动主体200。当运动主体200被释放时,即如图9c所示,第一保持部130的臂132朝向远离中心轴线ca的方向发生枢转并使凸起134以远离中心轴线ca的方式移动,凸起134离开第一锁止部236的中空结构,从而使运动主体200被释放,在第一驱动机构30的作用下,运动主体200朝向近端移动。
120.另外,参见图7b和图7c,在图7b和图7c所示的实施例中,第一保持部130的臂132在沿着由远端至近端的方向上可以朝向中心轴线ca靠拢。在这种情况下,通过沿着中心轴线ca的方向致动第一保持部130的臂132,即可使臂132发生枢转,并使凸起134以远离中心轴线ca的方式移动,凸起134离开第一锁止部236的中空结构,从而使运动主体200被释放。
121.另外,在一些示例中,辅助装置1000还可以包括配置为可使第一保持部130与第一锁止部236分离以释放运动主体200的第一触发机构50(参见图5b)。由此,能够通过第一触发机构50来方便地释放运动主体200。
122.在一些示例中,辅助装置1000还可以包括第一触发机构50(参见图5b)。第一触发机构50配置为可以触发第一保持部130,以使运动主体200被第一保持部130释放。在一些示例中,第一触发机构50可以配置为以彼此远离的方式致动第一保持部130和/或第一锁止部
236以释放运动主体200。例如,第一触发机构50可以配置为致动第一保持部130以远离中心轴线ca的方式移动以解除对第一锁止部236的保持,从而使运动主体200被释放。也就是说,第一触发机构50可以配置为致动第一保持部130和/或第一锁止部236,以使二者彼此远离从而使第一锁止部236被释放。
123.图8a是示出了本实施方式示例所涉及的第一外壳100的端部120与第一触发机构50的分解示意图;图8b是示出了本实施方式示例所涉及的第一外壳100的端部120的第二视角的立体示意图;图8c是示出了本实施方式示例所涉及的第一外壳100的端部120的仰视示意图;
124.图8d是示出了本实施方式示例所涉及的第一外壳100的端部120的俯视示意图;图8e是示出了本实施方式示例所涉及的第一触发机构50的立体示意图;图8f是示出了本实施方式示例所涉及的第一触发机构50的仰视示意图;图8g是示出了本实施方式示例所涉及的第一触发机构50与端部120装配前的剖面示意图;图8h是示出了本实施方式示例所涉及的第一触发机构50与端部120装配后的剖面示意图;
125.在一些示例中,第一触发机构50可以包括按压部502、致动部504以及装配部506(参见图8a)。第一触发机构50可以通过装配部506而装配于端部120。通过对按压部502施加作用可以使致动部504致动第一保持部130,从而使第一保持部130解除对运动主体200的保持以使运动主体200被释放。在一些示例中,按压部502可以大致呈圆饼状。
126.在一些示例中,第一触发机构50的致动部504可以大致沿着中心轴线ca的方向延伸。在一些示例中,第一触发机构50配置为可沿着中心轴线ca的方向移动。在这种情况下,通过沿着辅助装置1000的中心轴线ca驱动第一触发机构50的致动部504,由此能够操作简便地致动第一保持部130以与第一锁止部236分离。
127.在一些示例中,在沿着中心轴线ca的方向上进行投影,第一触发部50的致动部504与第一保持部130可以至少部分重合(例如,与第一保持部130的臂132至少部分重合),当第一触发部50沿着中心轴线ca的方向移动,第一保持部130可以被致动以远离第一锁止部236。由此,能够通过简单的操作来使第一保持部130释放第一锁止部236。
128.在另一些示例中,在沿着中心轴线ca的方向上进行投影,第一触发部50的致动部504与第一锁止部236可以至少部分重合,当第一触发部50沿着中心轴线ca的方向移动,第一锁止部236可以被致动以远离第一保持部130。由此,能够操作简便地对第一锁止部236进行释放。
129.在一些示例中,装配部506的数量可以为一个或多个,例如1、2、3、或4。在图8e所示的实施例中,装配部506可以为装配部506a和装配部506b。在一些示例中,多个装配部506可以对称分布在中心轴线ca外周。在图8e所示的实施例中,装配部506a与装配部506b对称分布在中心轴线ca的两侧。在一些示例中,装配部506可以形成在按压部502的周缘。
130.在一些示例中,装配部506可以由按压部502大致沿着中心轴线ca的朝向近端延伸。在一些示例中,装配部506可以具有大致沿着中心轴线ca的方向的臂512、以及由臂512沿着大致正交于中心轴线ca的方向朝向中心轴线ca突出的凸起514(参见图8e)。在一些示例中,装配部506的臂512可以由按压部502大致沿着中心轴线ca朝向近端延伸。
131.在一些示例中,装配部506的臂512可以具有弹性。在一些示例中,装配部506的臂512在沿着由远端至近端的方向上可以趋向于朝向中心轴线ca收缩。也就是说,在自然状态
下(即未受到外力的状态下),臂512靠近近端的一端与臂512靠近远端的一端两者相较而言,臂512靠近近端的一端与中心轴线ca的距离更近。在另一些示例中,臂512也可以与中心轴线ca大致平行。在一些示例中,当沿着大致正交于中心轴线ca的方向对臂512施加作用时,臂512可以发生枢转。例如,当沿着大致正交于中心轴线ca的方向以朝向中心轴线ca的方式对臂512施加作用时,臂512可以发生枢转,以使臂512靠近近端的一端朝着远离中心轴线ca的方向移动。
132.在一些示例中,装配部506的凸起514可以具有面向远端的表面。在一些示例中,凸起514面向远端的表面可以大致正交于中心轴线ca。与装配部506配合的部件(例如接下来即将描述的端部120的偏置部124和接合部126)可以通过搭接/抵接于凸起514面向远端的表面,从而与装配部506装配结合。
133.也就是说,装配部506可以为形成在第一触发机构50上的搭扣、闩锁结构。例如,装配部506可以形成为指状、一字状、l字状、j字状、z字状等至少可分解为两部分的结构,其至少一部分(例如,连接在按压部502上的臂512)可以发生枢转,另一部分(例如,由臂512向外突出且抵接于装配配合部件的凸起514)可以随着枢转而与装配配合部件(例如,接下来将要描述的端部120的偏置部124和接合部126)装配结合,例如被钩、挂、闩、顶、支承等。
134.在一些示例中,端部120可以包括偏置部124和接合部126(参见图8b和图8c)。在一些示例中,偏置部124与接合部126之间可以具有空隙。在这种情况下,装配部506可以经由偏置部124与接合部126之间的空隙而进入装配位置。在一些示例中,端部120的偏置部124和接合部126的数量可以为多个,例如1、2、3、或4。在一些示例中,端部120的偏置部124的数量、以及接合部126的数量可以与装配部506的数量相同。在图8b和图8c所示的实施例中,偏置部124可以为偏置部124a和偏置部124b,接合部126可以为126a和126b。
135.在一些示例中,偏置部124与中心轴线ca的距离可以大于接合部126与中心轴线ca的距离。在一些示例中,在沿着中心轴线ca且朝向近端的方向上,偏置部124可以逐渐靠近中心轴线ca。在一些示例中,在沿着中心轴线ca的方向上进行投影,偏置部124靠近近端的一端与接合部126可以相接或略有重合。
136.现在,请参见图8g和图8h,进一步说明装配部506与偏置部124和接合部126的装配结合。在装配结合之前,在沿着大致正交于中心轴线ca的方向上,装配部506a的凸起与装配部506b的凸起之间的距离可以略小于或大致等于接合部126a与接合部126b之间的距离(参见图8g)。在装配结合后,即沿着中心轴线ca朝向近端移动装配部506,装配部506可以经过偏置部124与接合部126之间的空隙,装配部506的臂512被偏置部124以朝向中心轴线ca的方式挤压,从而使得装配部506a的凸起与装配部506b的凸起之间的距离逐渐缩小并小于接合部126a与接合部126b之间的距离。在这种情况下,在偏置部124的挤压作用下,装配部506的凸起514面向远端的表面可以与接合部126接合,从而使装配部506与接合部126互锁以使第一触发机构50与端部120装配结合(参见图8h)。
137.也就是说,第一触发机构50与端部120可以通过一种搭扣、闩锁等结构而装配结合。
138.另外,在一些示例中,第一触发机构50还可以具有肋槽507。端部120可以具有端部肋128。在一些示例中,肋槽507的深度可以与端部肋128的厚度大致相同,肋槽507的宽度可以与端部肋128的宽度大致相同。在这种情况下,通过肋槽507与端部肋128的配合,能够对
装配过程提供引导作用。另外,通过肋槽507与端部肋128的配合,还能够有效抑止装配在端部120上的第一触发机构50发生不期望的旋转。
139.在一些示例中,肋槽507和端部肋128可以大致沿着中心轴线ca的方向延伸。在一些示例中,肋槽507的数量可以为一个或多个,例如1、2、3、或4。例如在图8e和图8f所示的实施例中,肋槽507可以为肋槽507a、肋槽507b、肋槽507c、以及肋槽507d。相应的,端部肋128的数量也可以为一个或多个,并且可以与肋槽507的数量相同。在图8b所示的实施例中,端部肋128可以为端部肋128a、端部肋128b、端部肋128c、以及端部肋128d。
140.图8i是示出了本实施方式示例所涉及的第一保持部130被第一触发机构50触发前的剖面示意图;图8j是示出了本实施方式示例所涉及的第一保持部130被第一触发机构50触发后的剖面示意图。需要说明的是,在图8i和图8j主要示意出第一触发机构50对第一保持部130的触发。
141.在一些示例中,如上所述,第一触发机构50的致动部504可以对第一保持部130进行致动,以使第一保持部130解除对运动主体200的保持,从而使运动主体200被释放。
142.在一些示例中,致动部504可以形成为由按压部502大致沿着中心轴线ca的朝向近端延伸的柱状结构(参见图8e)。在一些示例中,致动部504的数量可以为一个或多个,例如1、2、3、或4。在一些示例中,致动部504的数量可以与第一保持部130的数量相同。在图8e所示的实施例中,致动部504可以包括致动部504a和致动部504b。
143.在一些示例中,在端部120上,在大致沿着中心轴线ca的方向上形成有与第一保持部130对应的贯通结构(参见图8b、图8c或图8d)。在一些示例中,在沿着中心轴线ca的方向上进行投影,该贯通结构的投影面可以覆盖致动部504的投影面。
144.以下,参见图8i和图8j,详细说明致动部504对第一保持部130的触发。如上所述,在沿着中心轴线ca朝向近端的方向上第一保持部130逐渐向中心轴线ca收拢。致动部504配置为可以对第一保持部130进行致动以使第一保持部130靠近近端的一端以远离中心轴线ca的方式移动,从而解除对运动主体200的保持。在一些示例中,在沿着大致正交于中心轴线ca的方向上,致动部504a与致动部504b之间的距离可以略大于第一保持部130a与第一保持部130b之间的距离。
145.在致动部504对第一保持部130进行致动之前,第一保持部130a与第一保持部130b靠近近端的一端相互收拢,以与第一锁止部236形成互锁从而对运动主体200进行保持(参见图8i)。当致动部504对第一保持部130进行致动时(例如通过朝向近端的方向对按压部502进行按压),在致动部504的致动作用下,第一保持部130a与第一保持部130b逐渐向外张开(即,远离中心轴线ca),以使第一保持部130的凸起134离开第一锁止部236,从而解除第一保持部130与第一锁止部236之间的互锁,从而使运动主体200被释放(参见图8j)。
146.在一些示例中,端部主体121可以为实心结构。也就是说,端部主体121可以不具有通孔。在一些示例中,端部120可以具有由端部主体121朝向近端延伸的定位部122(参见图6b)。在这种情况下,第一驱动机构30的一端可以套设于运动主体200的定位部212,第一驱动机构30的另一端可以套设于端部120的定位部122。通过这样的方式,将第一驱动机构30设置在运动主体200与端部120之间。
147.在一些示例中,第一驱动机构30可以为弹簧。由此,能够通过一种简化的结构设计来为运动主体200提供致动机制。
148.在另一些示例中,端部主体121也可以为贯通结构。在一些示例中,第一触发机构50的定位部508可以呈圆柱状。第一驱动机构30可以套设于定位部508。在一些示例中,第一触发机构50的定位部508可以呈中空的圆柱状。第一驱动机构30可以套设于或嵌设于定位部508。在一些示例中,定位部508可以包括两个或更多个弧形柱。
149.在一些示例中,在第一触发部50与端部120之间可以设有防误机构520(参见图5b)。在一些示例中,防误机构520可以呈发夹状。在这种情况下,通过呈发夹状的防误机构520,能够有效抑制第一触发机构50发生朝向近端的不期望的移动。在一些示例中,防误机构520可以设置在第一触发机构50的按压部502与第一外壳100之间。
150.在一些示例中,在端部120与第一触发机构50之间还可以设有弹性部件,例如弹簧(未图示)。在一些示例中,设置在端部120与第一触发机构50之间的弹簧可以为压缩状态。在这种情况下,通过弹簧产生的朝向远端的作用,也能够抑止第一触发机构50发生朝向近端的不期望的移动。另外,通过设置在端部120与第一触发机构50之间的弹簧,还能够有助于对第一保持部130触发后,第一触发机构50回复至初始状态。在这种情况下,第一触发机构50对第一保持部130进行触发后能够自动回复至初始状态,由此能够有助于提供一种能够重复使用的辅助装置1000。
151.图9a是示出了第二外壳140与辅助机构20的第一视角的分解示意图;图9b是示出了第二外壳140与辅助机构20的第二视角的分解示意图;图9c是示出了辅助机构20装配至第二外壳140的剖面示意图;图9d是示出了本实施方式示例所涉及的盖190的示意图。
152.在一些示例中,运动主体200的第一底部210与侧壁230可以一体成型。在另一些示例中,运动主体200的第一底部210也可以与侧壁230可分离地装配结合。
153.在一些示例中,第一底部210可以具有结合部214(参见图9a)。在一些示例中,结合部214的数量可以为一个或多个,例如1个、2个、3个、或4个。在一些示例中,侧壁230可以具有运动主体施限部238(稍后描述)。运动主体施限部238可以对设置在运动主体200内的穿刺构件260施加限制,从而抑止穿刺构件260发生不期望的旋转。
154.在一些示例中,运动主体施限部238可以形成为沟槽和/或脊。在一些示例中,运动主体施限部238可以为两个并排设置的脊部以及位于两个脊部之间的沟槽。结合部214通过与运动主体施限部238的两个脊部的端接合,从而与侧壁230结合。
155.在一些示例中,第二外壳140可以包括第一限定机构150和第二限定机构170。在一些示例中,第一限定机构150与第二限定机构170可以相互连通。在一些示例中,第一限定机构150和第二限定机构170可以呈中空的柱状结构。在一些示例中,第一限定机构150可以可释放地保持运动主体200并且可以限定运动主体200的移动路径。在一些示例中,第二限定机构170可以限定医疗器械800的敷贴位置。
156.也就是说,在本实施方式所涉及的辅助装置1000中,壳体10可以包括具有第一保持部130的第一外壳100和可装配于第一外壳100的第二外壳140,第二外壳140可以具有相互连通的第一限定机构150和第二限定机构170,第二限定机构170可以配置为限定医疗器械800的敷贴位置,辅助机构20可以装配于第一限定机构150并且当运动主体200被第一保持部130释放时可沿着第一限定机构150移动。在这种情况下,通过第二外壳140的第一限定机构150来限定运动主体200的移动、并且通过第二外壳140的第二限定机构170来限定医疗器械800的敷贴位置,由此能够有利于更准确地将医疗器械800施加至宿主。
157.在一些示例中,第一限定机构150可以具有施限部151。施限部151可以对运动主体200施加限制,从而抑止运动主体200发生不期望的旋转。在一些示例中,施限部151可以为沟槽和/或脊。在一些示例中,施限部151可以包括设置在第一限定机构150的内壁上且大致沿着中心轴线ca延伸的脊部154。在一些示例中,施限部151还可以包括设置在第一限定机构150的内壁上且大致沿着中心轴线ca延伸的槽152。在一些示例中,脊部154与槽152的长度可以小于第一限定机构150的高度,并且脊部154与槽152可以在中心轴线ca的方向上大致共线。在一些示例中,施限部151还可以包括设置在第一限定机构150上的槽口156,槽口156、脊部154、与槽152可以沿着同一直线由近端至远端依次形成。在一些示例中,施限部151的数量可以为一个或多个,例如1、2、3、或4。在一些示例中,多个施限部151可以均匀分布在第一限定机构150的侧壁上。
158.在一些示例中,施限部151的脊部154可以与运动主体200的包括槽结构的受限部232(稍后描述)相配合,从而抑止运动主体200发生不期望的旋转。在一些示例中,运动主体200可以沿着槽152而被装配至第一限定机构150,由此槽152能够提供一种装配时的引导作用。另外,在一些示例中,槽口156可以用于为运动主体200的凸起234(稍后描述)提供接合空间。
159.另外,在一些示例中,第一限定机构150还可以包括设置在内壁上的加固肋158(参见图9b)。在一些示例中,加固肋158可以大致沿着中心轴线ca的方向延伸。在一些示例中,加固肋158的数量可以为多个,例如2、3、4、6等。在一些示例中,加固肋158可以均匀分布在第一限定机构150的内壁上。
160.另外,在一些示例中,第一限定机构150还可以包括设置在内壁上凸起160(稍后具体描述)。
161.另外,在一些示例中,第一限定机构150可以限制运动主体200在沿着中心轴线ca的方向上的行程。在这种情况下,通过第一限定机构150来限制运动主体200在沿着中心轴线ca的方向上的行程,由此能够更加准确地将容纳在容纳部250内的医疗器械800推送预定距离,从而能够更加准确地将医疗器械800施加至宿主。
162.另外,在一些示例中,在沿着中心轴线ca的方向上进行投影,容纳部250与第一限定机构150的壁可以至少部分重合、并且运动主体200靠近远端的一端与第一限定机构150的壁可以至少部分重合(参见图9c)。在这种情况下,通过使容纳部250和运动主体200与第一限定机构150的壁至少部分重合,由此能够在结构简化的情况下有效限制运动主体200沿着第一限定机构150移动的行程。
163.另外,在一些示例中,在运动主体200靠近远端的一端上设置有沿着大致正交于中心轴线ca的方向背向该中心轴线ca突出的凸起。在这种情况下,通过该凸起与第一限定机构150的壁形成搭扣,由此能够有效限制运动主体200朝向近端过度行进。
164.另外,在一些示例中,第一限定机构150可以抑止运动主体200的旋转。在这种情况下,通过抑止运动主体200的旋转,由此能够在施加过程中抑止穿刺构件260发生不期望的旋转。
165.另外,在一些示例中,第一限定机构150可以包括大致沿着中心轴线ca的方向连续或非连续地设置在内壁上的槽和/或脊。在这种情况下,通过将运动主体200与第一限定机构150的槽和/或脊卡合,由此能够有效抑止运动主体200在第一限定机构150内发生不期望
的旋转。
166.另外,在一些示例中,运动主体200可以包括大致沿着中心轴线ca的方向设置在侧壁230外壁上的槽和/或脊。在这种情况下,通过将运动主体200的槽和/或脊与第一限定机构150的槽和/或脊卡合,由此能够有效抑止运动主体200在第一限定机构150内发生不期望的旋转。
167.另外,在一些示例中,第一限定机构150和第二限定机构170可以呈中空筒状且第一限定机构150的内径可以不大于第二限定机构170的内径。在这种情况下,通过将第一限定机构150和第二限定机构170设置为中空筒状,由此能够便于辅助机构20沿着第一限定机构150和第二限定机构170移动。
168.另外,在一些示例中,当运动主体200被释放时,运动主体200可沿着第一限定机构150移动并且容纳部250可沿着第二限定机构170移动。在这种情况下,通过令运动主体200沿着第一限定机构150移动并且容纳部250沿着第二限定机构170移动,由此能够更准确地将容纳在容纳部250内的医疗器械800施加至宿主的体表的期望位置。
169.在一些示例中,在运动主体200的侧壁230上可以设有受限部232(参见图9a和图9b)。受限部232可以与第一限定机构150的施限部151进行配合,以抑止运动主体200发生不期望的旋转。在一些示例中,受限部232可以包括形成在侧壁230外壁上的槽235。在一些示例中,槽235可以形成在两个并排脊之间。在一些示例中,受限部232还可以包括由侧壁230沿着槽235的方向朝向远端延伸而形成的臂233。在一些示例中,受限部232还可以包括由臂233沿着大致正交于中心轴线ca的方向远离中心轴线而突出的凸起234。在一些示例中,受限部232的数量可以一个或多个,例如1、2、3、或4个。在一些示例中,受限部232的数量与施限部151的数量可以相同。在一些示例中,多个受限部232可以均匀分布在侧壁230上。在一些示例中,臂233可以具有弹性。
170.在一些示例中,在沿着大致正交于中心轴线ca的方向上进行投影,受限部232的凸起234的投影面相较于施限部151的槽口156的投影可以更远离中心轴线ca。另外,脊154的投影与槽235的投影可以大致接合。另外,凸起234的投影与槽152的投影可以大致接合。在一些示例中,容纳部250的长度和/或宽度可以大于第一限定机构150的直径。
171.以下,参考图9c,沿着中心轴线ca的方向朝向运动主体200施加作用,使运动主体200经由第二限定机构170而装配至第一限定机构150。凸起234可以滑行进入槽152,由此能够提供一种引导装配的机制。当凸起234抵接至脊154时,脊154对凸起234进行挤压并使臂233发生弹性形变,以使凸起234被朝向中心轴线ca移动而能够继续滑行经过脊154。当凸起234在中心轴线ca的方向上朝向远端突出于第一限定机构150,臂233回复至初始状态,以使凸起234在沿着大致正交于中心轴线ca的方向上突出于第一限定机构150。
172.与第一限定机构150装配结合的运动主体200,运动主体200的槽235可以与第一限定机构150的脊部154卡合。由此,当运动主体200沿着第一限定机构150移动时,能够被限定在脊部154延伸的方向上。另外,通过槽235与脊部154的卡合,还能够提供一种抑止旋转的机制,以抑止运动主体200在第一限定机构150内发生不期望的旋转。在这种情况下,当穿刺机构260随着运动主体200而刺入宿主的皮下时,由于不期望的旋转被有效抑止,从而能够减少在施加过程中给宿主带来的不适感。
173.另外,如上所述,在沿着中心轴线ca的方向上进行投影,凸起234的投影相较于槽
口156的投影更加远离中心轴线ca。在这种情况下,当运动主体200与第一限定机构150装配结合时,通过凸起234与槽口156形成搭扣连接,由此能够限定运动主体200朝向近端行进的位移量。
174.另外,如上所述,在沿着大致正交于中心轴线ca的方向上,与运动主体200的第二底部220连接的容纳部250的长度和/或宽度大于第一限定机构150的直径。在这种情况下,当运动主体200与第一限定机构150装配结合时,通过容纳部250能够限定运动主体200朝向远端行进的位移量。
175.在一些示例中,第二限定机构170可以包括上底部172、下底部176、以及连接上底部172和下底部176的侧部174(参见图9b)。在一些示例中,上底部172可以以这样的方式形成,即由第一限定机构150靠近近端的一端沿着大致正交于中心轴线ca的方向向外延伸。侧部174可以呈中空的筒状结构,并且侧部174的延伸方向可以大致平行于中心轴线ca。下底部176可以以这样的方式形成,即由侧部174靠近近端的一端沿着大致正交于中心轴线ca的方向向外延伸。
176.在一些示例中,下底部176沿着大致正交于中心轴线ca方向突出于侧部174的宽度与第一外壳100的周部110的厚度可以大致相等。
177.在一些示例中,第二限定机构170可以包括设置在侧部174上的肋槽178(参见图9b)。在一些示例中,肋槽178的数量可以为一个或多个,例如1个、2个、3个、或4个。在一些示例中,肋槽178可以以这样的方式形成,即在侧部174上并排设置两个大致沿着中心轴线ca的方向延伸的脊,肋槽178可以形成上这两个并排的脊之间。
178.在一些示例中,肋槽178可以与周部110的周部肋112配合以使第一外壳100与第二外壳140装配结合。在一些示例中,肋槽178的数量与周部肋112的数量可以相同。在一些示例中,周部肋112可以大致沿着中心轴线ca的方向以插接的方式装配进入肋槽178。在一些示例中,周部110的内轮廓与第二限定机构170的外轮廓大致相同。当大致沿着中心轴线ca的方向相向移动第一外壳100与第二外壳140时,周部肋112可以进入肋槽178,从而使第一外壳100与第二外壳140装配结合。
179.在一些示例中,第二限定机构170还可以包括设置在上底部172上的装配孔180(参见图9b)。在一些示例中,装配孔180的数量可以为一个或多个,例如1个、2个、3个、或4个。在一些示例中,装配孔180的数量可以与第一外壳100的连接柱114的数量相同。装配孔180可以与连接柱114配合以使第一外壳100与第二外壳140装配结合。连接柱114可以对接于装配孔180。
180.在一些示例中,第二限定机构170还可以包括凸缘183(参见图9b)。
181.在一些示例中,容纳部250可以沿着第二限定机构170进行移动。在一些示例中,当操作辅助装置1000时,通过将第二限定机构170敷贴在宿主的体表,由此能够限定医疗器械800的敷贴位置。
182.另外,在一些示例中,在第二限定机构170的侧部174的内壁上设有侧部卡槽182(参见图9a)。在一些示例中,侧部卡槽182的数量可以为多个,例如1个、2个、3个、或4个。在一些示例中,多个侧部卡槽182可以均匀地分布在侧部174的内壁上。在一些示例中,侧部卡槽182可以大致沿着中心轴线ca的方向延伸。侧部卡槽182可以与盖190的盖卡合部194(稍后描述)配合,以使第二外壳140与盖190装配结合。
183.在一些示例中,壳体10还可以包括可分离地盖设在第二外壳140上的盖190(参见图5b)。
184.在一些示例中,盖190可以包括盖底部192、以及设置在盖底部192上的盖卡合部194(参见图9d)。盖卡合部194可以与第二外壳140的侧部卡槽182配合以使盖190与第二外壳140装配结合。盖卡合部194的数量可以为多个,例如1个、2个、3个、或4个。盖卡合部194的数量可以与侧部卡槽182的数量相等。在图9d所示的实施例中,盖卡合部194可以包括盖卡合部194a和盖卡合部194b。盖卡合部194a和盖卡合部194b可以沿着盖190的对称轴线分布在盖底部192相对的两侧。
185.在一些示例中,盖卡合部194可以包括由盖底部192大致沿着中心轴线ca朝向远端延伸的臂、以及由臂的端部朝向远离中心轴线ca的方向突出的凸起。盖卡合部194的臂可以具有弹性。当盖190与第二外壳140装配结合时,盖卡合部194的凸起可以卡入第二外壳140的侧部卡槽182中。
186.在一些示例中,盖190还可以包括盖支柱196(参见图9d)。盖支柱196的轴可以大致平行于中心轴线ca。在一些示例中,盖支柱196可以通过由盖底部192沿着中心轴线ca朝向远端延伸而形成。在一些示例中,当运动主体200被保持时,容纳在容纳部250内的医疗器械800面向近端的表面与第二外壳140的下底部176之间的垂直距离可以大致等于盖支柱196的高度。在这种情况下,当盖190与第二外壳140装配结合时,通过盖支柱196对容纳在容纳部250内的医疗器械800进行支承,由此能够进一步抑制因例如误操作而导致运动主体200被不期望地释放。
187.在一些示例中,盖190还可以包括凸缘198(参见图9d)。盖190的凸缘198的位置可以与第二外壳140的凸缘183对应。具体而言,当盖190与第二外壳140装配结合时,在沿着中心轴线ca的方向上进行投影,凸缘198的投影面与凸缘183的投影面可以大致重合、或者凸缘198的投影面可以大致覆盖凸缘183的投影面。
188.图10a是示出了本实施方式示例所涉及的运动主体200与穿刺构件260的第一视角的分解示意图;图10b是示出了本实施方式示例所涉及的运动主体200与穿刺构件260的第二视角的分解示意图;图10c是示出了本实施方式示例所涉及的穿刺构件260被保持时的剖面示意图;图10d是示出了本实施方式示例所涉及的穿刺构件260被释放时的剖面示意图;图10e是示出了本实施方式示例所涉及的运动主体200与穿刺构件260预装配时的剖面示意图。
189.在一些示例中,运动主体200与穿刺构件260可以为一体式固定连接。在另一些示例中,运动主体200与穿刺构件260可以可分离地装配结合。在一些示例中,穿刺构件260可以可释放地被运动主体200保持。
190.在一些示例中,运动主体200可以具有靠近远端的第一底部210、靠近近端的第二底部220、以及连接第一底部210与第二底部220的侧壁230。在一些示例中,在第一底部210、第二底部220与侧壁230之间可以形成有中空部。在一些示例中,容纳部250可以设置在第二底部220并面向近端。在一些示例中,穿刺构件260可以设置在中空部内。在一些示例中,第二底部220可以具有贯通孔226。另外,在一些示例中,穿刺构件260可以经过贯通孔226。
191.在一些示例中,穿刺构件260可以可释放地设置在中空部内。另外,穿刺构件260可以配置为当被释放时可以相对于运动主体200在中空部内移动。在一些示例中,在运动主体
200的第二底部220与穿刺构件260之间可以设有第二驱动机构40。第二驱动机构40配置为可以朝向远端对穿刺构件260施加作用。当穿刺构件260被释放,第二驱动机构40可以朝向远端对穿刺构件260施加作用以使穿刺构件260离开宿主。在一些示例中,第二驱动机构40可以设置在穿刺构件260的支承座280与运动主体200的第二底部220之间。由此,能够有利于第二驱动机构40对穿刺构件260施加作用以远离容纳部250。
192.在一些示例中,如上所述,运动主体200可以包括侧壁230(参见图10a和图10b)。在一些示例中,运动主体200可以包括设置在侧壁230上的施限部238。穿刺构件260可以具有受限部285(稍后描述)。当穿刺构件260与运动主体200装配结合时,运动主体200可以通过施限部238对受限部285施加限定,以限定穿刺构件260的移动。在一些示例中,施限部238的数量可以为一个或多个,例如1个、2个、3个、或4个。在一些示例中,多个施限部238可以均匀地分布在侧壁230的内壁上。
193.在一些示例中,运动主体200还可以包括第二保持部242(参见图10a和图10b)。穿刺构件260可以具有第二锁止部286。当穿刺构件260与运动主体200装配结合时,运动主体200可以通过第二保持部242与穿刺构件260的互锁,以对穿刺构件260进行保持。在一些示例中,第二保持部242对穿刺构件260的保持可以是可释放的保持。在一些示例中,第二保持部242的数量可以为一个或多个,例如1个、2个、3个、或4个。在一个示例中,多个第二保持部242可以均匀地分布在侧壁230上。
194.另外,在一些示例中,运动主体200可以配置为可抑止穿刺构件260的旋转。在这种情况下,通过抑止穿刺构件260在施加过程中发生不期望的旋转,由此能够提高在医疗器械800施加过程中的用户体验。在一些示例中,运动主体200可以通过施限部238来抑止穿刺构件260在施加过程中发生不期望的旋转。
195.另外,在一些示例中,运动主体200可以包括大致沿着中心轴线ca的方向设置在侧壁230内壁上的槽和/或脊。在这种情况下,通过设置在运动主体200的侧壁内壁上的槽和/或脊与穿刺构件260的槽和/或脊配合,由此能够有效抑止穿刺构件260在施加过程中发生不期望的旋转。也就是说,在一些示例中,运动主体200的施限部238可以为大致沿着中心轴线ca的方向设置在侧壁230内壁上的槽和/或脊。
196.在一些示例中,运动主体200的施限部238可以形成为槽结构(参见图10a和图10b)。在一些示例中,施限部238可以包括大致沿着中心轴线ca的方向并排设置在侧壁230内壁上的两个脊、以及形成在该两个脊之间的沟槽。
197.另外,在一些示例中,运动主体200可以具有大致沿着中心轴线ca的方向的切口242。在这种情况下,通过在运动主体200上设置沿着中心轴线ca的方向的切口242,由此能够便于对设置在运动主体200的中空部内的穿刺构件260施加作用。
198.另外,在一些示例中,在第一限定机构150的内壁上可以设置有可经由切口242而朝向中心轴线ca突出的凸起160。在这种情况下,当运动主体200沿着第一限定机构150移动时,设置在第一限定机构150的内壁上的凸起160能够经由运动主体200的切口242而对穿刺构件260施加作用,由此能够在结构简化的情况下提供一种对穿刺构件260的触发机制。
199.在一些示例中,运动主体200的第二保持部242可以为形成在侧壁230上的切口(参见图10a和图10b)。在一些示例中,第二保持部242可以大致沿着中心轴线ca延伸且相互连通的第一切口244和第二切口246。第一切口244可以靠近近端,第二切口246可以靠近远端。
在一些示例中,第一切口244与第二切口246的宽度可以不同。在一些示例中,第一切口244的宽度可以大于第二切口246的宽度。
200.在一些示例中,容纳部250可以具有用于对敷贴部860进行约束的约束部252。在这种情况下,通过约束部252对容纳在容纳部250内的医疗器械800的敷贴部860进行约束,由此能够更稳固地对医疗器械800进行容纳。
201.在一些示例中,容纳部250的约束部252可以包括臂254、以及突出部256。其中,臂254可以由容纳部250的底部沿着与侧部大致相同的方向向外延伸。在一些示例中,臂254与容纳部250的侧部可以大致位于同一周向上。在一些示例中,臂254可以具有弹性。在一些示例中,臂254可以朝向中心轴线ca靠拢。在一些示例中,突出部256可以为设置在臂254的端部上的凸起。在一些示例中,突出部256可以朝向中心轴线ca突出。在这种情况下,约束部252能够对容纳在容纳部250内的医疗器械800进行卡持,由此能够更稳固地对医疗器械800进行容纳。
202.在一些示例中,约束部252的数量可以为一个或多个,例如1个、2个、3个、或4个。在一些示例中,约束部252可以沿着容纳部250的侧部均匀分布。
203.在一些示例中,穿刺构件260可以包括尖锐物270、以及对尖锐物270进行支承的支承座280(参见图10a和图10b)。在一些示例中,穿刺构件260的支承座280可以设置在运动主体200的中空部内,容纳部250可以设置于第二底部220,第二底部220可以具有贯通孔226,并且尖锐物270可以经过第二底部220的贯通孔226。在这种情况下,通过将尖锐物270设置为经过第二底部220的贯通孔226能够使尖锐物270与容纳在容纳部250内的医疗器械800相接合,由此能够便于通过穿刺构件260而将医疗器械800至少部分地置于宿主的皮下。
204.另外,在一些示例中,运动主体200还可以包括设置在第二底部220上的用于对第二驱动机构40进行定位的结构224(参见图10c)。在一些示例中,224可以呈柱状。在一些示例中224可以呈中空的圆柱状。在这种情况下,第二驱动机构40可以通过套设在224上而被定位,由此能够限定第二驱动机构40的驱动位置。
205.另外,在一些示例中,当穿刺构件260被保持时,支承座280与第一底部210的间距可以不小于尖锐物270突出于容纳部250的长度。在这种情况下,通过将支承座280与第一底部210的间距设置为不小于尖锐物270突出于容纳部250的长度能够为穿刺构件260离开宿主提供移动空间,由此能够减少穿刺构件260对宿主产生不期望的伤害。
206.在一些示例中,尖锐物270与支承座280可以一体成型。在另一些示例中,尖锐物270与支承座280可以配置为可可拆卸地装配结合。由此,能够便于对尖锐物270另行灭菌。
207.在一些示例中,穿刺构件260的受限部285可以形成为脊结构(参见图10b)。在一些示例中,受限部285可以包括大致沿着中心轴线ca的方向并排设置在支承座280侧壁上的两个沟槽、以及形成在该两个沟槽之间的脊。在一些示例中,受限部285的数量可以一个或多个,例如1个、2个、3个、或4个。在一些示例中,受限部285的数量与施限部238的数量可以相等。
208.另外,在一些示例中,支承座280可以包括大致沿着中心轴线ca的方向设置在外壁上的槽和/或脊。在这种情况下,通过支承座280的槽和/或脊与运动主体200的侧壁内壁上的槽和/或脊进行配合,由此能够有效抑止穿刺构件260发生不期望的旋转。也就是说,穿刺构件260的受限部285可以形成为大致沿着中心轴线ca的方向设置在外壁上的槽和/或脊。
穿刺构件260的受限部285可以与运动主体200的施限部238进行配合以抑止穿刺构件260发生不期望的旋转。
209.另外,在一些示例中,穿刺构件260可以包括配置为可与第二保持部242可释放地互锁的第二锁止部286。由此,穿刺构件260能够通过第二锁止部286与第二保持部242的配合而可释放地保持于第二保持部242。在一些示例中,第二锁止部286可以设置在穿刺构件260的支承座280上。
210.在一些示例中,第二锁止部286可以包括大致沿着中心轴线ca的方向延伸的臂287、以及与该臂287联动且大致沿着正交于中心轴线ca的方向背向中心轴线ca突出的凸起288。在这种情况下,当穿刺构件260被置于运动主体200的中空部内时,通过第二锁止部286与运动主体200的切口242进行搭接,由此能够在结构简化的情况下对穿刺构件260进行保持。在一些示例中,第二锁止部286的臂287在沿着大致正交于辅助装置1000的中心轴线ca的方向上可以具有弹性。
211.也就是说,在一些例中,运动主体200可以具有大致沿着中心轴线ca的方向的切口242。在一些示例中,当穿刺构件260被保持时,第二锁止部286的凸起288可以经过切口242。在这种情况下,通过将第二锁止部286的凸起288与搭接于运动主体200的切口242,由此能够在结构简化的情况下对第二锁止部286进行保持。
212.另外,在一些示例中,当穿刺构件260被释放时,第二锁止部286的臂288可以被朝向中心轴线ca挤压。由此,能够操作简便地对第二锁止部286进行释放。
213.另外,在一些示例中,第二保持部242与第二锁止部286可以通过搭扣、钩、闩、或销中的至少一种结构以可释放地互锁。在这种情况下,第二保持部242与第二锁止部286通过搭扣、钩、闩、或销中的至少一种结构以可释放地互锁,由此能够提供一种便于释放的互锁方式。
214.在一些示例中,穿刺构件260的第二锁止部286可以形成为肩结构(参见图10a和图10b)。在一些示例中,第二锁止部286可以包括大致沿着中心轴线ca的方向朝向远端延伸的臂287、以及由臂287的端部沿着大致正交于中心轴线ca且远离中心轴线ca的方向而突出的凸起288。在一些示例中,臂287可以具有弹性。在一些示例中,沿着中心轴线ca且朝向远端的方向,臂287可以逐渐地远离中心轴线ca。在一些示例中,沿着中心轴线ca的方向进行投影,凸起288的投影面与第一切口244的投影面可以全部或部分地重合。在一些示例中,第二锁止部286的数量可以为一个或多个,例如1个、2个、3个、或4个。在一些示例中,第二锁止部286的数量与第二保持部242的数量可以相等。
215.另外,在一些示例中,凸起288面向远端的表面的宽度可以小于第一切口244的宽度、并且可以大于第二切口246的宽度。
216.在一些示例中,当对第一限定机构150和运动主体200进行装配时,设置在第一限定机构150的内壁上的凸起160可以依次经过第二切口246和第一切口244。在这种情况下,通过设置第一切口244,能够提供一种对穿刺构件260的保持机制,另外,通过设置第二切口246,能够提供一种利于装配的结构。凸起160经过第二切口246而进入第一切口244,并且第二锁止部286的凸起288经由第一切口244而突出,由此能够提供一种对穿刺构件260的保持机制,另外凸起160能够经过第一切口244而抵接于第二锁止部286的凸起288,由此通过凸起160和第一切口244,还能够提供一种触发第二锁止部286被释放的触发机制。
217.参见图10e,通过朝向近端对穿刺构件260施加作用,使穿刺构件260进入运动主体200的中空部,并且穿刺构件260的受限部285与运动主体200的施限部238一一对准,受限部285可以卡嵌在施限部238内(参见图10e)。由此,一方面能够对穿刺构件260与运动主体200的装配提供引导;另一方面,装配在运动主体200内的穿刺构件260受到施限部238的限定,不期望的旋转能够受到有效地抑止。
218.另外,参见图10c和图10d,当穿刺构件260的第二锁止部286的凸起288被移动至第一切口244处时,由于不再受到侧壁230的内壁的挤压,臂287回复至初始状态,即沿着中心轴线ca凸起288的投影面与第一切口244的投影面全部或部分地重合,并且由于凸起288面向远端的表面的宽度大于第二切口246的宽度,凸起288被置于第一切口244中并且凸起288面向远端的表面抵接于第一切口244与第二切口246的交接处(参见图10c),从而被保持在运动主体200的中空部内。当对臂287施加作用以使其朝向中心轴线ca的方向进行枢转时,凸起288朝向中心轴线ca的方向移动,即向内收拢。在这种情况下,凸起288面向远端的表面不再抵接于第一切口244与第二切口246的交接处,从而使穿刺构件260被运动主体200释放(参见图10d)。
219.在一些示例中,当穿刺构件260被运动主体200释放后,第二驱动机构40朝向远端驱动穿刺构件260,以使穿刺构件260离开宿主。
220.在一些示例中,第二驱动机构40与第一驱动机构30可以具有相同或相似的配置,关于第二驱动机构40的特征请参见对第一驱动机构30的特征描述。在一些示例中,第二驱动机构40可以为弹簧。由此,能够通过一种简化的结构设计来为穿刺构件260提供致动机制。
221.在一些示例中,第二驱动机构40可以设置在支承座280与第二底部220之间,并且当穿刺构件260被保持时,支承座280与第一底部210的间距不小于传感器820被植入到皮下的深度。在这种情况下,通过为穿刺构件260提供足量的移动空间,由此能够有利于使穿刺构件260离开宿主。
222.在一些示例中,穿刺构件260可以具有设置在支承座280上的定位部289(参见图10c或图10d)。在一些示例中,定位部289可以为柱状结构。第二驱动机构40的一端可以套设于穿刺构件260的定位部289,第二驱动机构40的另一端可以套设于运动主体200的定位部212。通过这样的方式,将第二驱动机构40设置在运动主体200与穿刺构件260之间。
223.在一些示例中,辅助装置1000还提供一种触发机制,以使第二保持部242解除对第二锁止部286的互锁,从而使穿刺构件260从运动主体200被释放。也就是说,在一些示例中,辅助装置1000还包括配置为可使第二保持部242与第二锁止部286分离以释放穿刺构件260的第二触发机构。由此,能够通过第二触发机构来方便地释放穿刺构件260。
224.如上所述,第二锁止部286形成为一种能够与第二保持部242抵接的肩结构,从而通过搭扣的形式被第二保持部242保持。在一些示例中,这样一种触发机制被提供,即能够致动第二保持部242或第二锁止部286,以使第二保持部242与第二锁止部286分离。
225.在一些示例中,作用在第二保持部242和第二锁止部286上的触发机制可以设置在第二锁止部286的行进路径上。当运动主体200朝向近端移动时,该触发机制可以被引用。在一些示例中,该触发机制可以为设置在第二锁止部286的行进路径上的突出部。在这种情况下,当第二锁止部286经过该突出部时,第二锁止部286的臂287可以朝向中心轴线ca挤压并
发生弹性形变,以使第二锁止部286的凸起288与第一切口244和第二切口246分离。
226.在一些示例中,如前所述,在第一限定机构150的内壁上设置有凸起160(参见图9b)。当运动主体200沿着第一限定机构150移动时,运动主体200的第一切口244和第二切口246可以经过该凸起。另外,当穿刺构件260被保持在运动主体200的中空部内时,穿刺构件260的第二锁止部286受到该凸起160的挤压而发生形变,并且离开第一切口244与第二切口246的交接处,从而使穿刺构件260被释放。
227.另外,当对运动主体200和第一限定机构150进行装配时,凸起160可以依次经过第二切口246和第一切口244,直到运动主体200与第一限定机构150装配结合。通过设置在第一限定机构150的内壁上的凸起160、以及设置在运动主体200的侧壁230上的第一切口244和第二切口246,既能够提供一种行进间的触发机构,也不会对运动主体200与第一限定机构150的装配产生利影响。
228.在一些示例中,当运动主体200被保持且穿刺构件260也被保持时,在沿着辅助装置1000的中心轴线ca的方向上,容纳部250靠近近端的一面与第二限定机构170靠近近端的一面之间的距离大致等于第一限定机构150的凸起160与第二锁止部286的凸起288之间的距离(即,第一限定机构150的凸起160与第二切口246之间的距离)。在这种情况下,当容纳部250沿着第二限定机构170移动至宿主的体表时,穿刺构件260能够被释放,从而能够在适宜的时机使穿刺构件260退回以离开宿主。
229.以下,对辅助装置1000的施加过程再次进行描述:通过辅助装置1000将医疗器械800施加至宿主可以包括施加阶段、以及回退阶段。在施加阶段,医疗器械800可以被施加至宿主;在回退阶段,穿刺构件260可以离开宿主。
230.在施加阶段,通过按压第一触发机构50的按压部502,以使第一触发机构50的致动部504朝向近端移动;接着,当致动部504移动至第一保持机构130时,致动部504致动第一保持机构130朝向远离中心轴线ca的方向发生枢转(参见图8i和图8j),以使第一保持部130与第一锁止部236分离(参见图7b和图7c),从而使运动主体200被释放;接着,第一驱动机构30以朝向近端的方式对运动主体200施加作用,以使运动主体200朝向近端移动;接着,在穿刺构件260的作用下,容纳在容纳部250内的医疗器械800被至少部分地置于宿主的皮下。
231.在一些示例中,辅助装置1000也可以不包括第一驱动机构30。在这种情况下,当运动主体200被释放后,运动主体200也可以借助于人力而被朝向宿主驱动,从而通过穿刺构件260将容纳在容纳部250内的医疗器械800施加至宿主。
232.在回退阶段,随着运动主体200沿着第一限定机构150朝向近端移动,设置在第一限定机构150的内壁上的凸起160经过设置在运动主体200上的第一切口244与穿刺构件260的第二锁止部286相互靠近,并且凸起160对第二锁止部286进行挤压以使第二锁止部286以靠近中心轴线ca的方向发生枢转,以使第二锁止部286与第二保持部242分离(参见图10c和图10d);接着,第二驱动机构40以朝向远端的方式对穿刺构件260施加作用,以使穿刺构件260朝向远端移动并离开宿主。
233.在一些示例中,穿刺构件260与运动主体200也可以固定连接。另外,在一些示例中,辅助装置1000也可以不包括第二驱动机构40。在这种情况下,当医疗器械800被施加至宿主后,运动主体200可以借助于人力而整体以被朝向远离宿主的方向被驱动,由此与运动主体200固定连接的穿刺构件260可以跟随运动主体200而离开宿主。
234.另外,需要说明的是,在回退阶段,第一驱动机构30(或借助于人力)仍可朝向宿主对运动主体200施加作用。换言之,对于配置为弹性部件(例如,弹簧)的第一驱动机构30而言,当运动主体200被朝向宿主驱动并且容纳在容纳部250内的医疗器械800敷贴于宿主的体表时,第一驱动机构30仍可以处于储能状态。在这种情况下,在回退阶段,医疗器械800在第一驱动机构30的作用下紧贴于宿主的体表,由此能够有效降低医疗器械800在回退阶段脱离宿主的可能性。
235.图11a是示出了本实施方式示例所涉及的穿刺构件260的分解示意图;图11b是示出本实施方式示例所涉及的穿刺构件260的装配示意图;图11c是示出了本实施方式示例所涉及的针状部272的放大示意图。
236.如上所述,在本实施方式中,穿刺构件260可以包括尖锐物270、以及对尖锐物270进行支承的支承座280(参见图11a)。在一些示例中,尖锐物270与支承座280可以一体成型。在另一些示例中,尖锐物270可以可分离地与支承座280装配结合。在一些示例中,尖锐物270可以具有沟槽,并且医疗器械800可以全部或部分地置于该沟槽中。在一些示例中,第二驱动机构40可以向支承座280施加作用。在这种情况下,通过将医疗器械800全部或部分地置于尖锐物270的沟槽中,由此能够便于通过穿刺构件260而将医疗器械800至少部分地置于宿主的皮下。在一些示例中,传感器820的植入部分可以被置于尖锐物270的槽274内。
237.在一些示例中,尖锐物270可以包括针状部272(参见图11a)。在一些示例中,在针状部272上可以设有沿着针状部272的长度方向延伸的槽274。医疗器械800可以至少部分地设置于尖锐物270的凹槽274内。在这种情况下,传感器820可以被接收在槽274内,以便于使传感器820跟随尖锐物270而被置于宿主的皮下。
238.在一些示例中,尖锐物270可以包括与针状部272连接的帽部276(参见图11a)。在一些示例中,针状部272可以通过帽部276而装配于支承座280。在一些示例中,帽部276可以包括依次连接的第一部分277、第二部分278、以及第三部分279。在一些示例中,第一部分277、第二部分278、以及第三部分279可以为直径不同的三个柱状结构。另外,在一些示例中,第二部分278的直径可以小于第一部分277的直径并且小于第三部分279的直径,由此能够形成环状的凹部。
239.在一些示例中,支承座280可以包括尖锐物固定部282(参见图11a)。在一些示例中,尖锐物固定部282的数量可以为多个,例如2、3、或4。另外,多个尖锐物固定部282可以绕着中心轴线ca周向设置,以此对帽部276进行夹持。在一些示例中,支承座280可以具有相互聚拢的多个指状部,帽部276可以被该多个指状部可释放地夹持。也就是说,支承座280的尖锐物固定部282可以形成为相互聚拢的多个指状部。在这种情况下,通过尖锐物270的帽部276与支承座280的多个指状部配合,由此能够便于尖锐物270与支承座280之间的装配和拆卸。
240.在一些示例中,在沿着中心轴线ca且朝向近端的方向上,尖锐物固定部282可以逐渐朝向中心轴线ca聚拢。由此,能够形成对帽部276进行夹持的机制。在一些示例中,尖锐物固定部282可以包括大致沿着中心轴线ca的方向延伸的臂283、以及由臂283的端部朝向中心轴线ca向外突出的凸起284(参见图11a)。在一些示例中,臂283可以具有弹性。当尖锐物270与支承座280装配结合,尖锐物固定部282的凸起284可以嵌入帽部276的环状凹部内。第一部分277、第三部分279、以及环状凹部相互配合,从而对尖锐物270进行固定。第一部分
277和第三部分279分别从两个方向上抵接于凸起284。由此能够抑止尖锐物270沿着中心轴线ca相对于支承座280发生不期望的移动。
241.虽然以上结合附图和实施方式对本公开进行了具体说明,但是可以理解,上述说明不以任何形式限制本公开。本领域技术人员在不偏离本公开的实质精神和范围的情况下可以根据需要对本公开进行变形和变化,这些变形和变化均落入本公开的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1