一种超声多普勒血流速度矢量成像方法及系统与流程
1.本发明属于超声成像技术领域,涉及一种超声多普勒血流速度矢量成像方法。
背景技术:
2.心血管疾病是人类的第一杀手,进行血流矢量成像对心血管疾病诊断具有重要的临床意义,如判断冠脉或颈动脉狭窄、心脏三尖瓣/二尖瓣狭窄和返流等。目前,临床上常使用超声多普勒技术进行血流成像,但是现有的多普勒成像技术通常只能获得血流在超声波束方向的投影分量。真实的血流速度为矢量,而现有方法的方法只能得到超声波束方向的血流速度投影,进行血流矢量成像能够辅助医生进行精准、全面的心血管疾病诊断。
3.现有的超声多普勒成像方法(如彩超)只能获得血流速度在超声波束方向的速度投影分量,该方法中,通常超声发射波束和接收波束反向,沿着超声波束方向获得的多普勒频率可表示为:
[0004][0005]
其中f0为超声中心频率,为实际血流速度,θ为超声发射波束或接收波束与实际血流速度的夹角,c为超声速度,f
d
为多普勒频率。根据公式(1),可以计算获得即为沿着超声波束方向的血流速度分量。
[0006]
该方法存在以下缺点和不足:只能获得血流沿着超声波束方向的血流速度分量,即无法获得血流速度矢量。而血流情况复杂,特别是存在复杂病变的情况,单一血流速度分量测量的临床意义有限;多普勒成像精度取决于超声波束与血流速度之间夹角,夹角越接近垂直角,精度则越低;在存在病变等情况下,血流通常存在涡流等,现有成像方法精度较低、临床意义有限。
技术实现要素:
[0007]
本发明技术方案是提供一种超声多普勒血流速度矢量成像方法,包括以下步骤:
[0008]
s1、使用超声探头,对不同的超声换能器通道设置不同的发射延时,以多个不同角度将超声信号发射至成像空间区域中;
[0009]
s2、超声信号在血流和组织中传播、反射,超声探头接收到反射的超声信号;
[0010]
s3、处理发射的超声信号和接收的超声信号,计算成像空间区域内每一个体素点的不同发射、接收角度对应的多普勒频率信号;
[0011]
s4、通过以下步骤,使用多普勒频率信号和对应的超声信号的发射角、接收角构建血流速度矢量信号:
[0012]
成像空间区域中的每个体素点根据超声信号发射角和接收角,建立多普勒频率信号和血流速度的关系,并进行联立建立线性矩阵方程组;
[0013]
对所有体素点上的稀疏矩阵进行联立,建立大规模稀疏矩阵系统;
[0014]
使用最小二乘法求解大规模稀疏矩阵系统,得到所有体素点的血流速度矢量并生
成血流速度场;
[0015]
s5、将血流速度矢量场在显示装置上生成血流速度矢量场图像。
[0016]
本技术方案通过对成像空间区域的每个体素点位置,利用多个不同发射角、接收角的超声波束对血流进行扫描,获得多组多普勒频率。随后,对获得的多组多普勒频率使用最小二乘法进行后处理求解,便可以得到成像空间区域的血流速度矢量成像,从而获得血流速度的多个分量。
[0017]
在该技术方案的一个实施例中,在所述s1步骤中,通过控制不同超声换能器通道的延时,超声探头以多个不同角度发射非聚集平面波。
[0018]
在该技术方案的一个实施例中,在所述s1步骤中,超声探头以动态子孔径合成方法发射超声波,即使用多条聚焦超声波扫描成像空间区域。
[0019]
在该技术方案的一个实施例中,超声探头使用线阵探头对二维平面进行成像,在步骤s4中,多普勒频率信号和血流速度的关系为:
[0020][0021]
其中,α为血流速度方向与超声探头法向量方向夹角,v为血流速度幅值,体素点的第m个发射角记为θ
tm
,其第n个接收角记为θ
rn
,使用第m个发射角和第n个接收角的多普勒频率信号记为
[0022]
对成像空间区域内第k个体素点(k∈{1,2,...,nv})的与血流速度的关系进行联立建立线性矩阵方程组,记为:
[0023]
a
k
v
k
=u
k
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0024]
其中,矩阵a
k
∈r
m*n
×2,向量v
k
∈r2,向量u
k
∈r
m*n
×1,m为发射角的数量,n为接收角的数量;并且有:
[0025][0026][0027][0028]
在该技术方案的一个实施例中,超声探头使用二维面阵探头进行三维体成像,在步骤s4中,多普勒频率信号和血流速度的关系为:
[0029][0030]
其中为血流速度方向与超声探头方向的夹角,v为血流速度幅值,体素点的第m个发射角记为其第n个接收角记为如图2所示。使用第m个发射角和第n个接收角的多普勒频率信号记为
[0031]
对成像空间区域内第k个体素点(k∈{1,2,...,nv})的与血流速度的关系进行联立建立线性矩阵方程组,记为:
[0032]
a
k
v
k
=u
k
,
ꢀꢀꢀꢀꢀ
(8)
[0033]
其中,矩阵a
k
∈r
m*n
×3,向量v
k
∈r3向量u∈r
m*n
×1,m为发射角的数量,n为接收角的数量;并且有:
[0034][0035][0036][0037]
在该技术方案的一个实施例中,在步骤s4中,整个成像空间区域内所有体素点的线性矩阵方程组进行联立,建立大规模稀疏矩阵系统,记为:
[0038]
av=u,
ꢀꢀ
(12)
[0039]
其中,v=[v
1t
,...,v
nvt
]
t
,u=[u
1t
,...,u
nyt
]
t
,a为分块对角矩阵,nv为成像空间区域内体素点的数量,并且有
[0040][0041]
在该技术方案的一个实施例中,在步骤s4中,使用最小二乘法求解公式(12),即求解最小二乘法公式(14)得到每个体素点的血流速度矢量,
[0042]
|av
‑
u|2≤tol,
ꢀꢀ
(14)
[0043]
其中公式(14)小于等于号的左边为二范数,右边为迭代残差tol,迭代残差tol设为5%~10%,求解结果可以得到各个体素点的血流速度v在多个方向上血流速度分量。
附图说明
[0044]
通过结合附图对本技术示例性实施方式进行更详细的描述,本技术的上述以及其它目的、特征和优势将变得更加明显,其中,在本技术示例性实施方式中,相同的参考标号通常代表相同部件。
[0045]
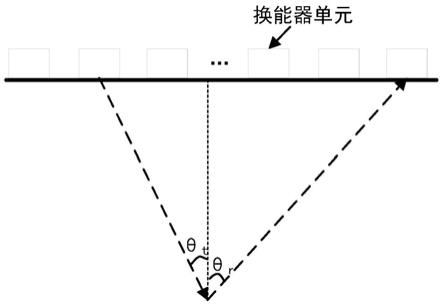
图1是实施例中使用线阵探头时的发射角和接收角的示意图。
[0046]
图2是实施例中使用二维面阵、弧面阵列或1.5d探头时的发射角和接收角的空间示意图。
具体实施方式
[0047]
下面将参照附图更详细地描述本技术的优选实施方式。虽然附图中显示了本技术的优选实施方式,然而应该理解,可以以各种形式实现本技术而不应被这里阐述的实施方式所限制。相反,提供这些实施方式是为了使本技术更加透彻和完整,并且能够将本技术的
范围完整地传达给本领域的技术人员。
[0048]
本实施例是一种超声多普勒血流速度矢量成像方法,其应用场景为体外超声(如经胸超声等)或内窥超声(如经食道超声、心腔内超声等)对心脏和血管内血流进行成像。使用探头可以为面成像或体成像探头,使用面成像探头可以得到血流速度的在成像平面的两个矢量分量,使用体成像探头可以得到成像体内血流速度的三个矢量分量。
[0049]
本实施例的超声波均可采用平面波或动态子孔径合成的方法发射超声波信号,使用平面波情况下,通常有多个发射角发射非聚焦平面波的超声信号,使用动态子孔径合成的情况下,通常使用多条聚焦超声信号依次扫描成像空间区域。
[0050]
本实施例以心腔内超声为例,使用超声多普勒进行血流速度矢量成像的方法,具体步骤如下:
[0051]
1、在进行成像前,可以使用或不使用微泡造影剂进行超声血流信号增强。
[0052]
2、进行心腔内超声成像,将心腔内超声探头经过外周静脉微创介入的方式插入心腔,并调整超声视窗位置和方位,对成像空间区域(例如心腔内)进行成像。
[0053]
此外,还可以进行经食道超声成像,将经食道超声探头插入食道,并调整超声视窗位置和方位,对成像空间区域,如心脏进行成像。
[0054]
4、使用多子孔径合成方法或平面波的方法发射超声波发射信号,随后超声探头接收到经反射的超声波回波信号;通过处理器处理超声波发射信号和接收的超声波回波信号提取信号信息,通过如下处理方式,使用提取的信号信息构建血流速度矢量信号,其中提取的信号信息包括但不限于多普勒频率信号,以及对应的发射角和接收角。
[0055]
处理方式具体是,对成像空间区域内的每个体素点,假设有m个超声波发射信号的发射角和n个超声波接收信号的接收角,在每个体素点上可以采集到m*n组多普勒频率信号,其中使用第m个发射角(m为1到m)和第n个接收角(n为1到n)的多普勒频率信号记为一般使用lag
‑
one autocorrelation相位方法获得,属于本领域公知常识,此处不做介绍。
[0056]
体外超声、经食道超声和心腔内超声通常有使用线阵探头和二维面阵探头两种,以下将分别介绍对线阵探头和二维面阵探头的处理过程:
[0057]
a.如图1中所示,使用换能器单元呈线性阵列的线阵探头进行面成像,则可以得到成像平面内的两个血流速度矢量分量,将第m个发射角记为θ
tm
,第n个接收角记为θ
rn
,多普勒频率信号与血流速度v的关系为:
[0058][0059]
其中α为血流速度方向与超声探头法向量方向的夹角,v为速度幅值,对成像空间区域内第k个体素点(k∈{1,2,...,nv})的与血流速度的关系进行联立建立线性矩阵方程组,记为:
[0060]
a
k
v
k
=u
k
,
ꢀꢀꢀꢀ
(3)
[0061]
其中矩阵a
k
∈r
m*n
×2,向量v
k
∈r2,向量u
k
∈r
m*n
×1。有如下:
[0062][0063][0064][0065]
b.如图2所示,使用换能器单元呈平面阵列的面阵探头进行体成像,可以得到成像空间区域内的三个血流速度矢量分量。以球坐标表示,且将换能器单元的所在平面记为xy平面,则将第m个发射角记为将第n个接收角记为可以获得整个成像空间区域内每个体素点k(k∈{1,2,...,nv}的三个速度分量。其中,与血流速度的关系为:
[0066][0067]
其中为血流速度方向与超声探头方向的夹角,v为速度幅值。相应的,对成像空间内每个体素点的与血流速度的关系进行联立建立线性矩阵方程组,也可以得到
[0068]
a
k
v
k
=u
k
,
ꢀꢀꢀꢀ
(8)
[0069]
其中矩阵a
k
∈r
m*n
×3,向量v
k
∈r3,向量u∈r
m*n
×1,有如下:
[0070][0071][0072][0073]
4、在第三步中的血流速度分量为单个体素点上的血流速度矢量计算。为对整个成像空间区域内的所有体素点的血流速度矢量进行测量,需要对所有体素点上的线性矩阵方程组进行联立,建立大规模稀疏矩阵系统,记为:
[0074]
av=u
ꢀꢀꢀꢀ
(12)
[0075]
其中,v=[v
1t
,...,v
nvt
]
t
,u=[u
1n
,...,u
vtt
]
a
,a为分块对角矩阵,nv为成像空间区域内体素点的数量,并且有:
[0076][0077]
5、使用最小二乘法求解大规模稀疏矩阵系统。由于a为非对称大规模稀疏病态矩阵(通常为超定线性系统),基于消元的方法计算较慢且常常不稳定,为提高求解公式(12)
速度和鲁棒性,本实施例提出使用稀疏矩阵gmres(generalized minimal residual method)方法,求解最小二乘法公式(14):
[0078]
|av
‑
u|2≤tol (14)
[0079]
其中公式(14)小于等于号的左边为二范数,右边为迭代残差,迭代残差一般设定为5%~10%,以防止病态系统求解中的过拟合现象,求解结果v即为向量化的各个体素点上的血流速度分量。也可以采用奇异值分解svd方法求解公式(14),然而,svd法计算效率远低于gmres,本专利不多做介绍。
[0080]
5、将计算得到的成像区域内体素的血流速度矢量信号生成血流速度矢量场,在显示装置上显示,就可以血流速度矢量场。
[0081]
作为本实施例的替代方式,平面换能器单元阵列可以更换成其他形式的换能器阵列,如弧面阵列、环形阵列、1.5d探头等。阵列的各项参数不限定,可以根据各种不同的应用环境选定不同的频率、阵元数、阵元间距、阵元分布方案等的阵列。
[0082]
本实施例使用gmres方法计算多个速度分量,作为本实施例的替代方式,也可使用其他基于最小二乘法消元的方法求解系统,比如奇异值分解等方法。
[0083]
以上已经描述了本技术的各实施例,上述说明是示例性的,并非穷尽性的,并且也不限于所披露的各实施例。在不偏离所说明的各实施例的范围和精神的情况下,对于本技术领域的普通技术人员来说许多修改和变更都是显而易见的。本文中所用术语的选择,旨在最好地解释各实施例的原理、实际应用或对市场中的技术的改进,或者使本技术领域的其它普通技术人员能理解本文披露的各实施例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1