1.本发明涉及医疗器械技术领域,更具体地说,它涉及直接前方入路髋关节置换术中的双肢联动测量装置。
背景技术:2.目前,恢复双下肢等长是人工髋关节置换术成功的重要技术目标,然而,人工髋关节置换术后出现患肢短缩或过度延长是临床常见结果,影响手术预期效果。如附图3~4所示,髋关节3是由髋臼32和股骨头31组成,是下肢的一个重要的负重关节,手术中需要用骨锯对患肢的股骨头31和大转子41两部分进行切割,必要时还需要对髋臼32进行一定程度的打磨。全髋关节置换术包括三个部分:用金属关节窝置换髋臼32;用金属或陶瓷关节头置换股骨头31;用金属杆插入股骨4干增加人工关节的稳定性。常见的手术入路主要有三类,分别是后外侧入路、外侧入路、前侧入路;其中前侧入路的术中体位为平卧位,后外侧入路、外侧入路的术中体位为侧卧位,即内收外旋侧肢体置于下方。
3.近年来,直接前方入路(direct anterior approach,daa)全髋关节置换术越来越多地受到关节外科医生的关注和应用。daa入路是真正的神经肌肉间隙入路,通过阔筋膜张肌和股直肌间隙进入,无肌肉软组织损伤和离断,出血少,术后康复块,髋关节3脱位发生率低,步态较其他入路较快恢复至正常。
4.但是daa的术野较其他入路小,需要在术中对患肢及假体的各项实时数据进行监控和测量,从而确保在术后得到双下肢等长的效果。又由于daa术中采用平卧位,因此,可以设计一款以健肢的实时数据为参照的双肢联动测量装置,以确保髋关节置换术达到最佳效果。
技术实现要素:5.本发明的目的在于提供直接前方入路髋关节置换术中的双肢联动测量装置,以解决上述背景技术中提出的问题。
6.发明的技术方案是:直接前方入路髋关节置换术中的双肢联动测量装置,包括有骨盆标定模块、股骨长度同步测量模块、股骨偏心距同步测量模块、髋关节同步定位模块;
7.所述骨盆标定模块包括有盆骨标定座,所述盆骨标定座成“t”型结构设置,包括有竖直设置的竖杆部,所述竖杆部的两侧分别横向滑移连接有第一杆和第二杆,所述竖杆部、第一杆、第二杆上设置有标尺结构,所述竖杆部上设置有用于带动第一杆、第二杆同时反向滑移的同步滑移机构;
8.所述股骨长度同步测量模块用于同步测量术中两股骨的实时长度信息,包括分别设置在第一杆、第二杆上的靶标件,所述靶标件用于固定在股骨上标记测量位置;
9.所述股骨偏心距同步测量模块用于同步测量术中患肢与健肢的偏心距数据;
10.所述髋关节同步定位模块用于根据健肢髋关节位置信息获取患肢需安装的髋关节位置信息。
11.还包括有主控制模块,所述主控制模块与股骨长度同步测量模块、股骨偏心距同步测量模块、髋关节同步定位模块耦接,实现各模块的信息整合和指令控制。
12.作为本发明的优选方案,所述同步滑移机构包括左剪叉、右剪叉、驱动部件,所述左剪叉、右剪叉对称设置在竖杆部横向上的两侧,所述左剪叉的另一端与第一杆连接,所述右剪叉的另一端与第二杆连接,所述驱动部件用于同时驱动左剪叉、右剪叉以竖杆部为起点进行伸缩。
13.作为本发明的优选方案,所述驱动部件包括电机、螺杆,所述左剪叉、右剪叉均由两条支叉铰接形成,所述竖杆部设置有供螺杆穿过的活动腔,所述活动腔的两侧设置有供四条支叉一端伸入的限位滑槽,四条支叉伸入活动腔的一端分别设置有与螺杆螺接的螺孔,且相互铰接的两条支叉的螺孔上的内螺纹相反。
14.作为本发明的优选方案,两个靶标件的一端连接在第一杆、第二杆上,另一端上设置有用于固定在股骨上的锁紧部,所述靶标件上设置有用于向前测量长度的第一测距传感器、用于向后测量长度的第二测距传感器。
15.作为本发明的优选方案,所述髋关节同步定位模块包括第一超声定位单元、第二超声定位单元,所述第一超声定位单元用于获取健肢的髋关节的三维位置信息,所述第二超声定位单元与第一超声定位单元耦接,用于根据第一超声定位单元测算患肢的髋关节的三维位置信息。
16.作为本发明的优选方案,所述髋关节同步定位模块包括有设置在第一杆上的机械臂、设置在机械臂上的射灯,所述机械臂与第二超声定位单元耦接,所述机械臂能够根据第二超声定位单元输出的位置信息控制射灯向指定位置发出指示射线。
17.作为本发明的优选方案,所述股骨偏心距同步测量模块包括用于分别获取两靶标件位置信息的靶标件坐标单元,所述靶标件坐标单元、第一超声定位单元、第二超声定位单元分别将两靶标件、两髋关节的位置信息传输至主控制模块,所述主控制模块分别计算得出两股骨的偏心距。
18.作为本发明的优选方案,所述竖杆部上设置有水平仪。
19.综上所述,本发明具有以下有益效果:通过各模块的联动配合,使得术中患肢侧的各项数值均能以健肢侧的对应数值进行实时参照与反馈,实现了术中双肢联动测量,从而大大提升了髋关节置换术术后双肢等长的成功率。
附图说明
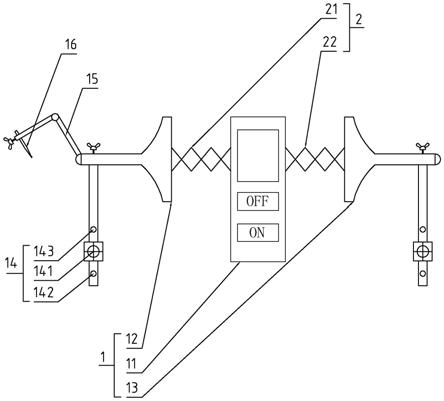
20.图1为直接前方入路髋关节置换术中的双肢联动测量装置的结构示意图;
21.图2为驱动部件剖视图;
22.图3为盆骨结构示意图;
23.图4为髋关节结构示意图。
24.附图标记:1、盆骨标定座;11、竖杆部;111、活动腔;12、第一杆;13、第二杆;14、靶标件;141、锁紧部;142、第一测距传感器;143、第二测距传感器;15、机械臂;16、射灯;2、同步滑移机构;21、左剪叉;22、右剪叉;23、驱动部件;231、电机;232、螺杆;233、支叉;3、髋关节;31、股骨头;32、髋臼;4、股骨;41、大转子;5、髋骨;6、耻骨联合。
具体实施方式
25.下面结合附图和实施例,对本发明进一步详细说明。其中相同的零部件用相同的附图标记表示。需要说明的是,下面描述中使用的词语“前”、“后”、“左”、“右”、“上”和“下”指的是附图中的方向,词语“底面”和“顶面”、“内”和“外”分别指的是朝向或远离特定部件几何中心的方向。
26.参照图1-4所示,直接前方入路髋关节置换术中的双肢联动测量装置,其特征是:包括有骨盆标定模块、股骨长度同步测量模块、股骨偏心距同步测量模块、髋关节同步定位模块;
27.骨盆标定模块包括有盆骨标定座1,盆骨标定座1成“t”型结构设置,包括有竖直设置的竖杆部11,竖杆部11的两侧分别横向滑移连接有第一杆12和第二杆13,竖杆部11、第一杆12、第二杆13上设置有标尺结构,竖杆部11上设置有用于带动第一杆12、第二杆13同时反向滑移的同步滑移机构2;
28.股骨长度同步测量模块用于同步测量术中两股骨4的实时长度信息,包括分别设置在第一杆12、第二杆13上的靶标件14,靶标件14用于固定在股骨4上标记测量位置;
29.股骨偏心距同步测量模块用于同步测量术中患肢与健肢的偏心距数据;
30.髋关节同步定位模块用于根据健肢髋关节3位置信息获取患肢需安装的髋关节3位置信息。
31.还包括有主控制模块,主控制模块与股骨长度同步测量模块、股骨偏心距同步测量模块、髋关节同步定位模块耦接,实现各模块的信息整合和指令控制。
32.本发明适用于直接前方入路的髋关节置换术,而联动一词表示,在整个髋关节置换术中,无论是标记、测量等均以健肢的各项对应数据信息作为实时参照。在手术过程中,患者采用平卧式,也就是患者的健肢与患肢均为正面向上平铺在手术台面上,此时健肢与患肢以耻骨联合6的延长线作为轴线形成轴对称结构。
33.由此可见,髋关节置换术中重要之一的髋关节3的定位可以通过本发明的装置进行对称定位,从而实现术后双肢等长的初步条件;其二,在股骨头31与大转子41切割后,股骨4与金属或陶瓷关节头安装,可以通过股骨4同步测量模块实时监测患肢、假体结合的实时动态长度与健肢股骨4同等姿态下的实时动态长度,保证双肢在术中的动态长度一致性,从而实现了术后双肢等长的充分条件;其三,通过股骨偏心距同步测量模块可以实现双肢偏心距一致,从而满足了术后双肢等长的必要条件。
34.盆骨标定座1的结构贴合人体盆骨结构,其中竖杆部11对应人体的耻骨联合6处,第一杆12、第二杆13与竖杆部11滑移连接,是指第一杆12、第二杆13分别能够沿耻骨联合6向两侧髋骨5移动,也就是第一杆12、第二杆13是用于联动标记出两侧髋骨5的位置信息,为后续髋关节3、股骨头31的定位做准备,也就是进一步提高髋关节置换术中,金属关节窝、金属或陶瓷关节头安装位置确定的精确性。
35.同步滑移机构2的设置,使得在手术过程中,只要一旦确定了健肢处的髋骨5位置,就能够使得患肢处的髋骨5位置得以同步确定,直观便捷,能够在术中高效完成手术定位。
36.主控制模块用于与其余模块耦接,其目的是实现各模块的信息整合和指令传输,其中:
37.骨盆标定模块中的第一杆12、第二杆13能够获取横向上的髋骨5各项数据,包括:
髋骨5外侧与耻骨联合6之间的距离尺寸、髋关节3与耻骨联合6之间的距离尺寸,也就是第一杆12、第二杆13作为x轴,能够获取髋关节3的x坐标;
38.骨盆标定模块中的竖杆部11能够获取竖向上的髋骨5的各项数据,其中最重要的是竖杆部11作为y轴,能够获取髋关节3的y坐标;
39.由于竖杆部11、第一杆12、第二杆13上设置有标尺结构,因此确定了髋关节3的(x,y)坐标,进而通过髋关节同步定位模块获取髋关节3的z坐标,从而获取了髋关节3的三维结构中的位置信息,通过健肢上髋关节3的位置信息与患肢上髋关节3的位置信息进行比对,当二者的坐标信息成x轴对称时,则表示此时确定的患肢髋关节3的位置信息为准确信息;
40.股骨长度同步测量模块能够获取健肢的股骨4长度数据、患肢的股骨4长度数据,通过靶标件14固定在健肢股骨4、患肢股骨4的对应位置上,通过一靶标件14为起始测量位置测量得患肢股骨4截骨后与健肢股骨4之间的差距,从而计算出所要安装的假体的露出留存长度,从而确保安装假体后的患肢的股骨4长度与健肢的股骨4长度保持一致;
41.股骨4偏心距测量模块,股骨4偏心距为股骨头31旋转中心到股骨4干长轴的垂直距离,也就是髋关节3到股骨4干长轴的垂直距离,从髋关节同步定位模块中可以获取髋关节3的位置信息,而又由于靶标件14固定在股骨4上,从靶标件14的位置信息中可以获取股骨4的位置信息,故而再通过计算即可得出股骨4的偏心距信息。
42.以上为各个模块获取的数据信息,主控制模块可以将上述数据信息进行相互传输、运算并可以通过外部显示屏或播放器进行输出,外部显示器或播放器优选地可以设置在骨盆标定座上,这样不会影响患肢处的手术范围,同时便于术中医师随时观测给定的手术位置数据。
43.综上,本发明具有以下有益效果:通过各模块的联动配合,使得术中患肢侧的各项数值均能以健肢侧的对应数值进行实时参照与反馈,实现了术中双肢联动测量,从而大大提升了髋关节置换术术后双肢等长的成功率。
44.同步滑移机构2包括左剪叉21、右剪叉22、驱动部件23,左剪叉21、右剪叉22对称设置在竖杆部11横向上的两侧,左剪叉21的另一端与第一杆12连接,右剪叉22的另一端与第二杆13连接,驱动部件23用于同时驱动左剪叉21、右剪叉22以竖杆部11为起点进行伸缩。
45.驱动部件23包括电机231、螺杆232,左剪叉21、右剪叉22均由两条支叉233铰接形成,竖杆部11设置有供螺杆232穿过的活动腔111,活动腔111的两侧设置有供四条支叉233一端伸入的限位滑槽,四条支叉233伸入活动腔111的一端分别设置有与螺杆232螺接的螺孔,且相互铰接的两条支叉233的螺孔上的内螺纹相反。
46.驱动部件23与主控制模块耦接,健肢的髋骨5位置可以在术前进行测量,再将术前测量的髋骨5数据输入主控制模块后,主控制模块可以控制驱动部件23带动电机231运转,而电机231上的螺杆232在转动时能够带动螺接在螺杆232上的四条支叉233移动。当四条支叉233向远离方向移动时,左剪叉21、右剪叉22收缩,带动第一杆12、第二杆13相互靠近;当电机231带动螺杆232反向转动时,四条支叉233向靠近方向移动,左剪叉21、右剪叉22伸展,带动第一杆12、第二杆13相互远离。在上述过程中第一杆12、第二杆13位移的距离尺寸相等,从而达到了同步的效果。
47.两个靶标件14的一端连接在第一杆12、第二杆13上,另一端上设置有用于固定在股骨4上的锁紧部141,靶标件14上设置有用于向前测量长度的第一测距传感器142、用于向
后测量长度的第二测距传感器143。
48.靶标件14固定在股骨4上指定位置时,向前为脚趾方向,向后为盆骨方向,通过第一测距传感器142测得的靶标件14至脚趾方向的距离尺寸,能够确定两个靶标件14所处位置是否对应,通过第二测距传感器143测得的靶标件14至股骨头31的距离尺寸,能够确定患肢上假体与截骨后股骨4的合体长度是否与健肢的股骨4长度匹配,从而确保术后双肢等长。
49.髋关节同步定位模块包括第一超声定位单元、第二超声定位单元,第一超声定位单元用于获取健肢的髋关节3的三维位置信息,第二超声定位单元与第一超声定位单元耦接,用于根据第一超声定位单元测算患肢的髋关节3的三维位置信息。
50.髋关节3定位模块主要测量两侧髋关节3的深度尺寸,即z轴坐标。其中,严重患者的原髋关节3处会出现局部恶化,需要将原髋关节3处的骨头向深度方向进行一定程度的打磨,再安装金属关节窝,而由于原髋关节3处的深度发生变化,因此会导致安装后的金属关节窝与健肢侧的髋关节3在空间位置上不匹配,这样会导致术后患者双肢行走不正常。
51.因此设置第一超声单元、第二超声单元对双侧的髋关节3的位置信息进行监测,第一超声单元捕捉健肢的髋关节3z1坐标,结合骨盆标定座获取健肢髋关节3坐标(x1,y1,z1),通过主控制模块计算对称的患肢髋关节3坐标理论上为(-x1,y1,z1),然后主控制模块将计算得出的该理论坐标与第二超声单元测得的实时髋关节3坐标进行对比,从而确定安装后金属关节窝的患肢髋关节3处的坐标符合理论坐标,从而保证了术后两侧髋关节3的对称。
52.髋关节同步定位模块包括有设置在第一杆12上的机械臂15、设置在机械臂15上的射灯16,机械臂15与第二超声定位单元耦接,机械臂15能够根据第二超声定位单元输出的位置信息控制射灯16向指定位置发出指示射线。
53.射灯16的设置能够在手术过程中明确标识处髋关节3的位置信息,从而便于在术中进行金属关节窝的安装。
54.股骨偏心距同步测量模块包括用于分别获取两靶标件14位置信息的靶标件坐标单元,靶标件坐标单元、第一超声定位单元、第二超声定位单元分别将两靶标件14、两髋关节3的位置信息传输至主控制模块,主控制模块分别计算得出两股骨4的偏心距。
55.股骨4偏心距为股骨头31旋转中心到股骨4干长轴的垂直距离,也就是髋关节3到股骨4干长轴的垂直距离,从髋关节同步定位模块中可以获取髋关节3的位置信息,而又由于靶标件14固定在股骨4上,从靶标件14的位置信息中可以获取股骨4的位置信息,故而再通过计算即可得出股骨4的偏心距信息。
56.也就是通过将同一侧的靶标件14的y轴坐标减去髋关节3的y轴坐标即可以获取该侧的股骨4偏心距。
57.竖杆部11上设置有水平仪。水平仪的设置是用于测量骨盆标定座在测量过程中的水平状态,从而能够进一步保证各模块在监测过程中所得出数据的对称对应关系。
58.进一步地,骨盆标定座上还可以设置用于快速安装在患者身上或者手术台上的安装结构;若安装在手术台上方,则可以在骨盆标定座上设置红外标识装置,从而确定骨盆标定座与患者骨盆位置的对应,而后各模块所捕捉到的数值信息传输至主控制模块时,主控制模块则可以依据骨盆标定座与患者骨盆实际位置的高度差值进行相应的处理,从而得出
在患者实际骨盆位置上的对应数据信息。
59.以上仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。