一种基于变形的血管抓取安全性评估方法及装置
1.本发明涉及机械手安全控制技术领域,尤其涉及一种基于变形的血管抓取安全性评估方法及装置。
背景技术:
2.手术辅助机器人是辅助手术顺利完成的一类机器人,其作用是降低医生工作量,提升手术成功率,及减轻患者痛楚,其安全性是评估该机器人是否可靠的一个非常重要的标准。手术辅助机器人的其中一个发展方向是逐渐代替医生完成一些手术操作。而夹起并挪动血管是大型手术中经常出现的一个操作,例如大动脉血管阻挡住病灶时就必须暂时挪动开大动脉以便对病灶进行切割。由于这些血管在患者以后的生活中还需要使用甚至非常重要,所以必须保证血管不受损坏。若由机器人完成这一操作,则应该在操作前对血管的安全性进行评估,也既预先计算机器人的夹持会对血管造成怎样的变形影响,若变形过大,则应重新考虑操作方案。
3.目前关于这个问题的评估技术一般为即时图像测量或即时力感应。前者是通过图像技术在线测量血管的变形,后者是通过力传感器控制夹持血管时机器手指的输出力。这两种技术都能对血管的安全起到保障作用,但显然还不足够,因为这两种方法并不能提供设定安全阈值的依据,而没有可靠的安全阈值显然不能令医生和患者觉得该机器人操作足够安全可靠。
技术实现要素:
4.本发明的目的在于克服现有技术的不足,本发明提供了一种基于变形的血管抓取安全性评估方法及装置,可以在对血管抓取操作钱进行安全性预评估,并可根据血管变形量对机器手手指的力输出设置合理的安全阈值,有效预防该手术操作对血管的破坏。
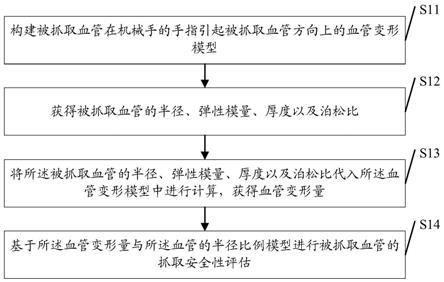
5.为了解决上述技术问题,本发明实施例还提供了一种基于变形的血管抓取安全性评估方法,所述方法包括:
6.构建被抓取血管在机械手的手指引起被抓取血管方向上的血管变形模型;
7.获得被抓取血管的半径、弹性模量、厚度以及泊松比;
8.将所述被抓取血管的半径、弹性模量、厚度以及泊松比代入所述血管变形模型中进行计算,获得血管变形量;
9.基于所述血管变形量与所述血管的半径比例模型进行被抓取血管的抓取安全性评估。
10.可选的,所述构建被抓取血管在机械手的手指引起被抓取血管方向上的血管变形模型,如下:
[0011][0012]
其中,m为大于或等于1的自然数;n为大于或等于0的偶数;π表示圆周率;表示无
量纲量,其中,s表示血管的弧度,r表示血管的半径;w
mn
表示加载方向的位移相关函数。
[0013]
可选的,所述加载方向的位移相关函数如下:
[0014][0015]
其中,r表示血管的半径;π表示圆周率;m为大于或等于1的自然数;p表示机械手手指的力;t=2r/(lπ),l表示血管的长度;k=eh/(1-μ2),e表示血管的弹性模量,h表示血管的厚度,μ表示血管的泊松比;m
**
表示当速度为0时的位移方程系数矩阵;m
*
表示完整的位移方程系数矩阵。
[0016]
可选的,所述当速度为0时的位移方程系数矩阵表示如下:
[0017][0018]
其中,λ=mπr/l,m表示大于或等于1的自然数,π表示圆周率,r表示血管的半径,l表示血管的长度;μ表示血管的泊松比;n为大于或等于0的偶数;j表示无量纲量,j=h2/(12r2),h表示血管的厚度。
[0019]
可选的,所述完整的位移方程系数矩阵如下:
[0020][0020][0022]
其中,λ=mπr/l,m表示大于或等于1的自然数,π表示圆周率,r表示血管的半径,l表示血管的长度;μ表示血管的泊松比;n为大于或等于0的偶数;j表示无量纲量,j=h2/(12r2),h表示血管的厚度。
[0023]
可选的,所述基于所述血管变形量与所述血管的半径比例模型进行被抓取血管的抓取安全性评估,包括:
[0024]
利用所述血管变形量与所述血管的半径在所述半径比例模型进行计算,获得计算比例结果;
[0025]
利用所述计算比例结果进行被抓取血管的抓取安全性评估。
[0026]
可选的,所述半径比例模型如下:
[0027][0028]
其中,a表示计算比例结果;w表示血管变形量;r表示血管的半径。
[0029]
另外,本发明实施例还提供了一种基于变形的血管抓取安全性评估装置,所述装置包括:
[0030]
构建模块:用于构建被抓取血管在机械手的手指引起被抓取血管方向上的血管变形模型;
[0031]
获得模块:用于获得被抓取血管的半径、弹性模量、厚度以及泊松比;
[0032]
计算模块:用于将所述被抓取血管的半径、弹性模量、厚度以及泊松比代入所述血
管变形模型中进行计算,获得血管变形量;
[0033]
评估模块:用于基于所述血管变形量与所述血管的半径比例模型进行被抓取血管的抓取安全性评估。
[0034]
在本发明实施例中,可以在对血管抓取操作钱进行安全性预评估,并可根据血管变形量对机器手手指的力输出设置合理的安全阈值,有效预防该手术操作对血管的破坏。
附图说明
[0035]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见的,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它的附图。
[0036]
图1是本发明实施例中的基于变形的血管抓取安全性评估方法的流程示意图;
[0037]
图2是本发明实施例中的基于变形的血管抓取安全性评估装置的结构组成示意图。
具体实施方式
[0038]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
[0039]
实施例一
[0040]
请参阅图1,图1是本发明实施例中的基于变形的血管抓取安全性评估方法的流程示意图。
[0041]
如图1所示,一种基于变形的血管抓取安全性评估方法,所述方法包括:
[0042]
s11:构建被抓取血管在机械手的手指引起被抓取血管方向上的血管变形模型;
[0043]
在本发明具体实施过程中,所述构建被抓取血管在机械手的手指引起被抓取血管方向上的血管变形模型,如下:
[0044][0045]
其中,m为大于或等于1的自然数;n为大于或等于0的偶数;π表示圆周率;表示无量纲量,其中,s表示血管的弧度,r表示血管的半径;w
mn
表示加载方向的位移相关函数。
[0046]
进一步的,所述加载方向的位移相关函数如下:
[0047][0048]
其中,r表示血管的半径;π表示圆周率;m为大于或等于1的自然数;p表示机械手手指的力;t=2r/(lπ),l表示血管的长度;k=eh/(1-μ2),e表示血管的弹性模量,h表示血管的厚度,μ表示血管的泊松比;m
**
表示当速度为0时的位移方程系数矩阵;m
*
表示完整的位移方程系数矩阵。
[0049]
进一步的,所述当速度为0时的位移方程系数矩阵表示如下:
[0050][0051]
其中,λ=mπr/l,m表示大于或等于1的自然数,π表示圆周率,r表示血管的半径,l表示血管的长度;μ表示血管的泊松比;n为大于或等于0的偶数;j表示无量纲量,j=h2/(12r2),h表示血管的厚度。
[0052]
进一步的,所述完整的位移方程系数矩阵如下:
[0053][0054]
其中,λ=mπr/l,m表示大于或等于1的自然数,π表示圆周率,r表示血管的半径,l表示血管的长度;μ表示血管的泊松比;n为大于或等于0的偶数;j表示无量纲量,j=h2/(12r2),h表示血管的厚度。
[0055]
具体的,根据弹性力学中的薄壳理论构建被抓取血管在机械手的手指引起被抓取血管方向上的血管变形模型。
[0056]
在建立血管变形模型时,可以将血管可看成是圆柱形薄壳。对于圆柱形薄管,根据弹性理论中的知识可以知道微分平衡方程为:
[0057][0058]
在式(1)中a和b分别是α方向和β方向的拉梅系数,具有关系如下:
[0059][0060]
对于圆柱薄壳,有:
[0061][0062]
在式(3)中r为圆柱壳的半径。在式(1)中k1和k2分别是α方向和β方向的主曲率,对于圆柱薄壳有:
[0063][0064]
将式(3)和式(4)代入式(1),且引入无量纲量其中s表示弧度,则式(1)变为:
[0065][0066]
根据弹性理论中知识可知,薄圆柱壳的六条几何方程为:
[0067][0068]
在式(6)中∈1和∈2分别为α方向和β方向的正应变,∈
12
是切应变;χ1和χ2分别是k1和k2的变化量;χ
12
是扭率的变化量;u、v和ω分别是3个方向的位移。
[0069]
根据弹性理论中的知识,以及圆柱壳的几何特殊性(式(3)和式(4)),可以推导出圆柱薄壳的物理方程如式(7)-式(14):
[0070][0071][0072][0073][0074][0075][0076][0077][0078]
其中,h表示血管的厚度,μ表示血管的泊松比,e表示血管的弹性模量;d表示血管弯曲刚度,可更加弹性模量和泊松比求得,d=eh3/[12(1-μ2)]。
[0079]
下面,联合各微分平衡方程、几何方程和物理方程进行求解。首先,将式(10)和式(12)代入式(13),将式(11)和式(12)代入式(14),可得:
[0080][0081][0082]
注:
[0083]
然后,联合平衡微分方程,式(7)-式(9)以及式(16)-式(17),有:
[0084]
[0085][0086][0087]
式(17)-式(19)中:
[0088][0089][0090][0091][0092][0093]
将式(17)-式(19)写成矩阵形式有:
[0094][0095]
下面开始求解式(20)。式(20)的求解必须先对u、v、ω、q1、q2和q3的形式做出合理假设。根据经验,认为它们具有以下形式:
[0096]
[0097][0098]
其中,m、n表示自然数,且有(l是血管长度):
[0099][0100][0101][0102][0103]
将式(21)-式(26)代入式(20),且令则式(20)变为:
[0104][0105]
由式(21)可知,当n=0时,v=0,此时式(27)简化为:
[0106][0107]
令则式(28)转化为:
[0108][0109]
下面使用边界条件确定函数的最终表达形式。根据血管被机器手指夹起时的实际情况,可以判断q1和q2一直为0,而q3等于外力,也既机器手指施加在血管上的力。对于集中力,可利用狄拉克函数来描述,也既有:
[0110][0111]
其中,δ(x)是狄拉克函数:
[0112][0113]
联合式(22)和(30)-(31),可求解得:
[0114][0115]
其中,
[0116]
由q1=0,q2=0和式(24)、式(25)可知q
1mn
=0,q
2mn
=0。将q
1mn
=0和式(32)代入式(29)有:
[0117][0118]
当n为非0偶数时(既n=2k+2),将q
1mn
=0和式(32)代入式(29)有:
[0119][0120]
其中,
[0121]
[0122][0123]
将式(34)代入式(21)有:
[0124][0125]
对于式(35),容易知当m=2k时有所以,式(35)可简化为:
[0126][0127]
s12:获得被抓取血管的半径、弹性模量、厚度以及泊松比;
[0128]
在本发明具体实施过程中,根据医护人员及相关的技术人员输入的方式得到被抓取血管的半径、弹性模量、厚度以及泊松比。
[0129]
s13:将所述被抓取血管的半径、弹性模量、厚度以及泊松比代入所述血管变形模型中进行计算,获得血管变形量;
[0130]
在本发明具体实施过程中,通过将上述得到的被抓取血管的半径、弹性模量、厚度以及泊松比代入构建的血管变形模型中进行计算,即可计算得到血管变形量。
[0131]
s14:基于所述血管变形量与所述血管的半径比例模型进行被抓取血管的抓取安全性评估。
[0132]
在本发明具体实施过程中,所述基于所述血管变形量与所述血管的半径比例模型进行被抓取血管的抓取安全性评估,包括:利用所述血管变形量与所述血管的半径在所述半径比例模型进行计算,获得计算比例结果;利用所述计算比例结果进行被抓取血管的抓取安全性评估。
[0133]
进一步的,所述半径比例模型如下:
[0134][0135]
其中,a表示计算比例结果;w表示血管变形量;r表示血管的半径。
[0136]
具体的,利用该血管变形量与该血管的半径在该半径比例模型进行计算,获得计算比例结果;利用该计算比例结果即可进行被抓取血管的抓取安全性评估。
[0137]
其中,半径比例模型如下:
[0138][0139]
其中,a表示计算比例结果;w表示血管变形量;r表示血管的半径。
[0140]
比如,假设血管半径为15cm,厚度为1.2cm,弹性模量为2.6mpa,泊松比为0.48(由于仅是计算示例,非实际操作案例,因此数值与实际血管不相符,此数据为硅胶水管数据),
将上述数据代入血管变形模型中进行相关的计算,即可机器手指的输出力与血管的变形关系;当机器手指输出力大约为2n时,血管的相对变形量大约为37%,因此建议将2n作为安全阈值;在此以变形量为37%为安全阈值。
[0141]
在本发明实施例中,可以在对血管抓取操作钱进行安全性预评估,并可根据血管变形量对机器手手指的力输出设置合理的安全阈值,有效预防该手术操作对血管的破坏。
[0142]
实施例二
[0143]
请参阅图2,图2是本发明实施例中的基于变形的血管抓取安全性评估装置的结构组成示意图。
[0144]
如图2所示,一种基于变形的血管抓取安全性评估装置,所述装置包括:
[0145]
构建模块21:用于构建被抓取血管在机械手的手指引起被抓取血管方向上的血管变形模型;
[0146]
在本发明具体实施过程中,所述构建被抓取血管在机械手的手指引起被抓取血管方向上的血管变形模型,如下:
[0147][0148]
其中,m为大于或等于1的自然数;n为大于或等于0的偶数;π表示圆周率;表示无量纲量,其中,s表示血管的弧度,r表示血管的半径;w
mn
表示加载方向的位移相关函数。
[0149]
进一步的,所述加载方向的位移相关函数如下:
[0150][0151]
其中,r表示血管的半径;π表示圆周率;m为大于或等于1的自然数;p表示机械手手指的力;t=2r/(lπ),l表示血管的长度;k=eh/(1-μ2),e表示血管的弹性模量,h表示血管的厚度,μ表示血管的泊松比;m
**
表示当速度为0时的位移方程系数矩阵;m
*
表示完整的位移方程系数矩阵。
[0152]
进一步的,所述当速度为0时的位移方程系数矩阵表示如下:
[0153][0154]
其中,λ=mπr/l,m表示大于或等于1的自然数,π表示圆周率,r表示血管的半径,l表示血管的长度;μ表示血管的泊松比;n为大于或等于0的偶数;j表示无量纲量,j=h2/(12r2),h表示血管的厚度。
[0155]
进一步的,所述完整的位移方程系数矩阵如下:
[0156]
[0157]
其中,λ=mπr/l,m表示大于或等于1的自然数,π表示圆周率,r表示血管的半径,l表示血管的长度;μ表示血管的泊松比;n为大于或等于0的偶数;j表示无量纲量,j=h2/(12r2),h表示血管的厚度。
[0158]
具体的,根据弹性力学中的薄壳理论构建被抓取血管在机械手的手指引起被抓取血管方向上的血管变形模型。
[0159]
在建立血管变形模型时,可以将血管可看成是圆柱形薄壳。对于圆柱形薄管,根据弹性理论中的知识可以知道微分平衡方程为:
[0160][0161]
在式(1)中a和b分别是α方向和β方向的拉梅系数,具有关系如下:
[0162][0163]
对于圆柱薄壳,有:
[0164][0165]
在式(3)中r为圆柱壳的半径。在式(1)中k1和k2分别是α方向和β方向的主曲率,对于圆柱薄壳有:
[0166][0167]
将式(3)和式(4)代入式(1),且引入无量纲量其中s表示弧度,则式(1)变为:
[0168][0169]
根据弹性理论中知识可知,薄圆柱壳的六条几何方程为:
[0170][0171]
在式(6)中∈1和∈2分别为α方向和β方向的正应变,∈
12
是切应变;χ1和χ2分别是k1和k2的变化量;χ
12
是扭率的变化量;u、v和ω分别是3个方向的位移。
[0172]
根据弹性理论中的知识,以及圆柱壳的几何特殊性(式(3)和式(4)),可以推导出圆柱薄壳的物理方程如式(7)-式(14):
[0173][0174][0175][0176][0177]
[0178][0179][0180][0181]
其中,h表示血管的厚度,μ表示血管的泊松比,e表示血管的弹性模量;d表示血管弯曲刚度,可更加弹性模量和泊松比求得,d=eh3/[12(1-μ2)]。
[0182]
下面,联合各微分平衡方程、几何方程和物理方程进行求解。首先,将式(10)和式(12)代入式(13),将式(11)和式(12)代入式(14),可得:
[0183][0184][0185]
注:
[0186]
然后,联合平衡微分方程,式(7)-式(9)以及式(16)-式(17),有:
[0187][0188][0189][0190]
式(17)-式(19)中:
[0191][0192][0193]
[0194][0195][0196]
将式(17)-式(19)写成矩阵形式有:
[0197][0198]
下面开始求解式(20)。式(20)的求解必须先对u、v、ω、q1、q2和q3的形式做出合理假设。根据经验,认为它们具有以下形式:
[0199][0200][0201]
其中,m、n表示自然数,且有(l是血管长度):
[0202][0203]
[0204][0205][0206]
将式(21)-式(26)代入式(20),且令则式(20)变为:
[0207][0208]
由式(21)可知,当n=0时,v=0,此时式(27)简化为:
[0209][0210]
令则式(28)转化为:
[0211][0212]
下面使用边界条件确定函数的最终表达形式。根据血管被机器手指夹起时的实际情况,可以判断q1和q2一直为0,而q3等于外力,也既机器手指施加在血管上的力。对于集中力,可利用狄拉克函数来描述,也既有:
[0213][0214]
其中,δ(x)是狄拉克函数:
[0215]
[0216]
联合式(22)和(30)-(31),可求解得:
[0217][0218]
其中,
[0219]
由q1=0,q2=0和式(24)、式(25)可知q
1mn
=0,q
2mn
=0。将q
1mn
=0和式(32)代入式(29)有:
[0220][0221]
当n为非0偶数时(既n=2k+2),将q
1mn
=0和式(32)代入式(29)有:
[0222][0223]
其中,
[0224][0225][0226]
将式(34)代入式(21)有:
[0227][0228]
对于式(35),容易知当m=2k时有所以,式(35)可简化为:
[0229][0230]
获得模块22:用于获得被抓取血管的半径、弹性模量、厚度以及泊松比;
[0231]
在本发明具体实施过程中,根据医护人员及相关的技术人员输入的方式得到被抓取血管的半径、弹性模量、厚度以及泊松比。
[0232]
计算模块23:用于将所述被抓取血管的半径、弹性模量、厚度以及泊松比代入所述血管变形模型中进行计算,获得血管变形量;
[0233]
在本发明具体实施过程中,通过将上述得到的被抓取血管的半径、弹性模量、厚度以及泊松比代入构建的血管变形模型中进行计算,即可计算得到血管变形量。
[0234]
评估模块24:用于基于所述血管变形量与所述血管的半径比例模型进行被抓取血管的抓取安全性评估。
[0235]
在本发明具体实施过程中,所述基于所述血管变形量与所述血管的半径比例模型进行被抓取血管的抓取安全性评估,包括:利用所述血管变形量与所述血管的半径在所述半径比例模型进行计算,获得计算比例结果;利用所述计算比例结果进行被抓取血管的抓取安全性评估。
[0236]
进一步的,所述半径比例模型如下:
[0237][0238]
其中,a表示计算比例结果;w表示血管变形量;r表示血管的半径。
[0239]
具体的,利用该血管变形量与该血管的半径在该半径比例模型进行计算,获得计算比例结果;利用该计算比例结果即可进行被抓取血管的抓取安全性评估。
[0240]
其中,半径比例模型如下:
[0241][0242]
其中,a表示计算比例结果;w表示血管变形量;r表示血管的半径。
[0243]
比如,假设血管半径为15cm,厚度为1.2cm,弹性模量为2.6mpa,泊松比为0.48(由于仅是计算示例,非实际操作案例,因此数值与实际血管不相符,此数据为硅胶水管数据),将上述数据代入血管变形模型中进行相关的计算,即可机器手指的输出力与血管的变形关系;当机器手指输出力大约为2n时,血管的相对变形量大约为37%,因此建议将2n作为安全阈值;在此以变形量为37%为安全阈值。
[0244]
在本发明实施例中,可以在对血管抓取操作钱进行安全性预评估,并可根据血管变形量对机器手手指的力输出设置合理的安全阈值,有效预防该手术操作对血管的破坏。
[0245]
本领域普通技术人员可以理解上述实施例的各种方法中的全部或部分步骤是可以通过程序来指令相关的硬件来完成,该程序可以存储于一计算机可读存储介质中,存储介质可以包括:只读存储器(rom,read only memory)、随机存取存储器(ram,random access memory)、磁盘或光盘等。
[0246]
另外,以上对本发明实施例所提供的基于变形的血管抓取安全性评估方法及装置进行了详细介绍,本文中应采用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1