一种便携自助式口咽拭子采样机器人
1.本公开涉及医学检测、咽拭子采集、医疗机器人等领域,尤其涉及一种便携自助式口咽拭子采样机器人。
背景技术:
2.口咽拭子是一种从咽喉处收集鼻腔分泌物的临床测试样本的方法,对采集样本进行分析,以确定是否存在生物体或其他疾病的临床标记。相比与鼻咽拭子采样,口咽拭子采样是一项相对简单的检测方法。但面对covid
‑
19、sars等新发突发传染病疫情,口咽拭子采样存在巨大交叉感染风险,给医护人员心理和生理带来巨大压力,医护人员需全天穿戴防护服工作,采样工作负荷高,消耗了大量医疗人力资源。
技术实现要素:
3.本公开旨在解决上述问题之一。
4.为此本公开实施例提供的通过视触融合精准完成口咽部位样本采集的便携自助式口咽拭子采样机器人,包括:采样模块、消杀模块、电控模块,
5.所述采样模块,用于采集使用者的图像,识别需要采集的部位,在所述电控模块的控制下对使用者进行口咽拭子样本采集;
6.所述消杀模块,在每次样本采集后,在所述电控模块的控制下对采集后污染的区域进行消杀。
7.本公开实施例提供的便携自助式口咽拭子采样机器人,具有以下特点及有益效果:
8.本公开引入机器人技术进入口咽拭子采样流程,视触融合精准完成口咽部位样本采集,被采集者能根据简单的几步指导,完成“自助式”全流程口咽拭子采样,极大地提升了口咽拭子采样的效率,降低交叉感染风险,建立人机共融智能操作的新型咽拭子采样。
9.在一些实施方式中,所述采样机器人还包括:
10.用于固定使用者头部位置的头托,用于保证咽后壁充分暴露的咬口器;
11.所述头托的下部设置有压力传感器。
12.在一些实施例中,所述电控模块包括:
13.状态检测单元,用于保证状态指示灯、拭子指示灯、采集指示灯工作正常且拭子签安插成功;
14.咽后壁视觉信息处理单元,用于采用基于模板匹配的咽后壁视觉信息处理,完成咽后壁的空间坐标区域确定,并从摄像头坐标系映射到世界坐标系;
15.咽拭子触觉信息处理单元,用于采用基于算数平均的咽拭子触觉信息处理,分析咽拭子的接触力觉,完成咽后壁的深度坐标区域的校正,获取有效采集所需的最小力觉,同时避免对口腔内壁组织的过度损伤;
16.识别与定位单元,综合咽后壁的空间坐标区域、校正后的深度坐标区域实现咽后
壁的空间识别和定位。
17.在一些实施例中,所述咽后壁视觉信息处理单元包括:第一获取子单元,用于运用摄像头获取包含人脸的二维彩色图像,通过模板匹配检测获取人脸关键点坐标进而确定口腔嘴唇的坐标位置;第二获取子单元,用于根据口腔与咽后壁的空间拓扑关系计算出咽后壁的空间坐标区域;
18.所述咽拭子触觉信息处理单元包括:布置子单元,用于将力觉传感器布置在咽拭子后端与拭子签处于一条水平线上;处理子单元,用于基于算数平均完成连续触觉信号处理,确定信号采样频率、采样力觉平均值和力觉域带宽;校正子单元,用于校正咽后壁的深度坐标区域,划定咽拭子有效采样区域的空间坐标。
19.在一些实施例中,所述第一获取子单元包括:
20.通过二维彩色图像对嘴部外轮廓进行检测,通过像素坐标系的二维坐标对相机坐标系三维坐标的转换,完成对嘴部关键点在相机坐标系下三维坐标的解算,通过人体嘴部和咽后壁的生理拓扑关系,得到咽后壁空间位置坐标,坐标连接成的连通区域即为定位的咽部区域。
21.在一些实施例中,所述消杀模块包括:液泵和气泵通过管路将消毒液储存盒与雾化喷头连接,将液体和气体输送到雾化喷头中,雾化喷头将消毒液与空气混合,通过液泵的压力将混合物进行雾化喷射;
22.所述消杀模块还包括:设置于机体侧面的消毒液加注口及消毒液释放口,并且在消毒液加注口与释放口之间设有液位显示。
23.在一些实施例中,所述头托包括:头托支架,所述头托支架上设置有柱形槽和矩形槽,
24.在所述柱形槽中设置有弹簧,在所述矩形槽中设置有微动开关,所述微动开关通过头托支架上的第一孔位连接电源线;
25.所述电源线连接航空插头,所述微动开关上设置有下巴垫,所述下巴垫通过自带的第二孔位与弹簧连接;所述头托支架的顶部还设置有额部支撑;
26.所述额部支撑和所述下巴垫均为圆润式结构。
27.在一些实施方式中,所述咬口器包括:牙齿位置定位单元、双曲面口腔支撑单元和压舌单元,
28.在所述双曲面口腔支撑单元的上部和下部分别设置有牙齿位置定位单元,所述双曲面口腔支撑单元的下部与所述压舌单元连接。
29.在一些实施方式中,所述牙齿位置定位单元由上下两个短板构成,所述短板为凸台形状;所述双曲面口腔支撑单元为双曲抛物面状结构,所述压舌单元为人类舌头形状。
30.在一些实施例中,所述采样模块包括采样机构,所述采样机构包括:底部支架,
31.所述底部支架的顶部设置有旋转舵机,所述旋转舵机通过法兰固定力觉传感器;所述法兰与轴承架的后部连接,轴承架的前部安装有直线轴承;
32.所述直线轴承与微动开关支架的底部定位连接,用于触发力觉传感器,所述微动开关支架的前部用于固定微动开关;
33.所述微动开关支架的前部还与拭子架固定连接,所述拭子架的上部嵌入弹簧片用于固定咽拭子。
附图说明
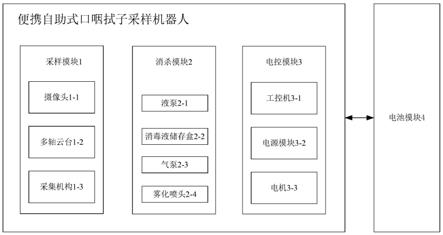
34.图1为本公开实施例提供的便携自助式口咽拭子采样机器人的结构示意图;
35.图2为本公开实施例提供的便携自助式口咽拭子采样机器人的临床应用示意图;
36.图3为本公开实施例提供的便携自助式口咽拭子采样机器人的另一结构示意图;
37.图4为本公开实施例提供的“自助式”机器人口咽拭子采集流程图;
38.图5为本公开实施例提供的便携自助式口咽拭子采样机器人的结构示意图;
39.图6为本公开实施例提供的视触融合的咽后壁识别单元的操作示意图;
40.图7为本公开实施例提供的人脸68个特征点位置示意图;
41.图8为本公开实施例提供的基于算数平均的咽拭子触觉信息处理的流程图;
42.图9为本公开实施例提供的便携自助式口咽拭子采样机器人的内部布局图;
43.图10为本公开实施例提供的便携自助式口咽拭子采样机器人外观图;
44.图11为本公开实施例提供的含有压力传感器的头托结构的示意图;
45.图12为本公开实施例提供的咬口器的三维示意图;
46.图13为本公开实施例提供的咬口器的尺寸示意图;
47.图14为本公开实施例提供的咬口器的另一尺寸示意图;
48.图15为本公开实施例提供的便携自助式口咽拭子采样机器人的末端采集机构示意图;
49.图16为本公开实施例提供的便携自助式口咽拭子采样机器人的舵机旋转示意图;
50.图17为本公开实施例提供的机器人故障自检测与快速维护示意图;
51.图18为本公开实施例提供的机器人部署流程示意图。
52.附图中,各标号所代表的部件列表如下:
53.1:采样模块;2:消杀模块;3:电控模块;4:电池模块;
54.5:急停按钮;6:头托;7:咬口器;
55.9:头托支架;10:弹簧;11:微动开关;12:下巴垫;
56.13:电源线;14:航空插头;15:额部支撑;16:矩形槽
57.17:柱形槽18:牙齿位置定位模块;19:压舌模块;
58.20:双曲面口腔支撑单元;21:外廓宽度;22:内弧宽度;
59.23:压舌单元的长度:24:内弧长度;25:压舌单元的宽度;
60.26:咽拭子;27:弹簧片;28:拭子架;29:微动开关;
61.30:微动开关支架;31:轴承架;32:直线轴承;33:法兰;
62.34:力觉传感器;35:旋转舵机;36:底部支架;
[0063]1‑
1:摄像头;1
‑
2:多轴云台;1
‑
3:采集机构;
[0064]2‑
1:液泵;2
‑
2:消毒液储存盒;2
‑
3:气泵;2
‑
4:雾化喷头;
[0065]3‑
1:工控机;3
‑
2:电源单元;3
‑
3:电机;
[0066]8‑
1:处理器;8
‑
2:存储器;8
‑
3:总线。
具体实施方式
[0067]
为了使本技术的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本技术进行进一步详细描述。应当理解,此处所描述的具体实施例仅仅用于解释本技术,并
不用于限定本技术。
[0068]
相反,本技术涵盖任何由权利要求定义的在本技术精髓和范围上做的替代、修改、等效方法以及方案。进一步,为了使公众对本技术有更好的了解,在下文对本技术的细节描述中,详尽描述了一些特定的细节部分。对本领域技术人员来说没有这些细节部分的描述也可以完全理解本技术。
[0069]
针对以上问题,从实际出发,本公开实施例引入机器人技术进入口咽拭子采样流程,视触融合精准完成口咽部位样本采集,被采集者能根据简单的几步指导,完成“自助式”全流程口咽拭子采样,极大地提升了口咽拭子采样的效率,减少医护工作者与被检测者的接触,避免交叉感染。同时采样生物安全性极为重要,需具有自主消杀,提供采集生物安全性保障,以实现连续可靠地采样。目前大面积采样筛查需求频发,口咽拭子采样不仅仅在固定医院进行,在社区、海关、移动医院等场合均需开展任务,这些均对口咽拭子采样机器人的便携性提出了要求。
[0070]
实施例1
[0071]
一、便携自助式口咽拭子采样机器人整体设计
[0072]
参见图1,本公开实施例提供的便携自助式口咽拭子采样机器人主要包含3大模块,分别为:采样模块1、消杀模块2、电控模块3。采集模块1由摄像头1
‑
1、多轴云台1
‑
2和采集机构1
‑
3组成,根据摄像头1
‑
1采集到的图像,智能识别需要采集的部位,然后对使用者进行口咽拭子样本采集。消杀模块2由消毒液储存盒2
‑
2、液泵2
‑
1、气泵2
‑
3、雾化喷头2
‑
4组成,在每次样本采集后,自动对采集后污染的区域进行消杀。电控模块3由工控机3
‑
1、电源单元3
‑
2、电机3
‑
3等组成,由工控机3
‑
1控制各个单元按照流程进行工作。
[0073]
机器人内部配备电池模块4,可以进行长时间不间断地可靠稳定地工作,并且机器人本身体积小、结构紧凑,便于室内、户外的快速部署,快速进入工作状态。
[0074]
为应对采集过程中可能出现使用者在采集过程中需要停止采集的情况,机身正面还设置有急停按钮5,使用者可以随时停止采集。图1为便携自助式口咽拭子采样机器人的示意图。图2为便携自助式口咽拭子采样机器人临床应用示意图。
[0075]
便携自助式口咽拭子采样机器人使用配件如图3所示,便携自助式口咽拭子采样机器人设计了头托6确保被采集人头部位置,设计了咬口器7确保咽后壁的充分暴露。头托6采用弧形设计确保额头贴合,使用者下巴放置在头托6上后,面部自然微微扬起,使摄像头1
‑
1更好地采集到目标位置的视频图像。头托6的下部设置有压力传感器,正确使用时,触发压力传感器,开始进行咽拭子采集过程。在采集过程中,下巴未压紧下巴托,机器人会给出语音提示用户。咬口器7采用弧形压舌片,有效下压舌头有助于目标部位更好地曝露,方便咽拭子机器人进行快速有效的采集,咬口器7设有多种型号,适合于各种人群。
[0076]
二、“自助式”机器人口咽拭子采集流程
[0077]
便携自助式口咽拭子采样机器人的采集全流程为“自助式”采集,无需医生操作干预,每一步操作均有语音提示与示范视频,被采集者在语音指导或者通过示范视频,只需简单几步即可完成咽拭子采样。不同于人工采样、人员遥控操作采样、机器人全自主采样,本公开实施例采用“自助式”采样方式,将医护人员咽拭子采集过程中的“咽拭子采集过程”实现自主化,包括:采用咽后壁视触识别对采集部位进行定位,识别到咽后壁后电控模块3里的程序控制采集机构1
‑
3进行采集,通过采集机构1
‑
3中的传感器实现力反馈。
[0078]
其中,咽拭子装卸、递交试管等辅助过程仍然由人工完成。机器人完成核心采样任务,避免医护人员穿戴防护服长时间高压工作,辅助过程由被采集者在视频、语音提示人工完成。全过程仅需医生或志愿者在一旁监督指导,实用性高,可靠性强。“自助式”机器人口咽拭子采集流程如图4所示。流程图中左侧部分为使用者的使用流程,右侧虚线框部分为机器人内部流程。
[0079]
步骤1:使用者在取完拭子签、试管、咬口器7、垫纸后准备采样时,先查看机器人的状态指示灯是否为绿灯常亮状态,确保绿灯常亮状态后再进行下面的步骤;
[0080]
步骤2:完成步骤1后,使用者将拭子签插入机器人的拭子夹中,如果此时机器人上的拭子指示灯为绿色常亮状态,则表示拭子签安装成功;如果拭子指示灯熄灭或有语音提示
‘
重新插入’时则表示拭子签没有安装成功,需要取下拭子签重新插入;
[0081]
步骤3:完成步骤2后,使用者口含咬口器7,将一次性垫纸粘贴在头托6上,然后将下颚垫在头托6上,此时如果采集指示灯为绿灯常亮状态,点击开始按钮,准备进行咽拭子采集;如果将下颚垫在头托6上后采集指示灯处于熄灭状态,则需要重新调整;
[0082]
步骤4:机器人完成状态检测,确保拭子签已经安插成功,下颚压在头托6上,确保采集对象处于准确位置,通过摄像头1
‑
1采集到的使用者的视频图像判定人脸,通过基于模板匹配的咽后壁视觉信息处理找到口咽采集部位,然后采集机构1
‑
3根据识别到的口咽采集部位运动到指定位置,通过基于算数平均的咽拭子触觉信息处理完成力感控制的信息处理,然后采集机构1
‑
3旋转拭子签擦拭咽后壁组织进行咽拭子采集。采集过程中采集指示灯为闪烁状态,采集完成后指示灯恢复为长亮状态;
[0083]
步骤5:采样结束使用者将拭子签取下后,消杀指示灯自动亮起,此时消杀指示灯处于长亮状态,5秒后进行消杀;消杀过程中,消杀指示灯闪烁,消杀完成后机器人状态指示灯长亮,其余指示灯全部熄灭;
[0084]
步骤6:采集完成后,使用者将取下的拭子签放入试管中,折断多余的拭子签,将试管盖拧紧后放入试管托盘中。最后将咬口器7、垫纸放入垃圾桶,手部消毒,离开采集区。
[0085]
其中,该电控模块3中的工控机3
‑
1包括:
[0086]
状态检测单元,用于保证状态指示灯、拭子指示灯、采集指示灯工作正常且拭子签安插成功;
[0087]
咽后壁视觉信息处理单元,用于采用基于模板匹配的咽后壁视觉信息处理,完成咽后壁的空间坐标区域确定,并从摄像头坐标系映射到世界坐标系;
[0088]
咽拭子触觉信息处理单元,用于采用基于算数平均的咽拭子触觉信息处理,分析咽拭子的接触力觉,完成咽后壁的深度坐标区域的校正,获取有效采集所需的最小力觉,同时避免对口腔内壁组织的过度损伤;
[0089]
识别与定位单元,综合咽后壁的空间坐标区域、校正后的深度坐标区域实现咽后壁的空间识别和定位。
[0090]
其中,咽后壁视觉信息处理单元包括:
[0091]
第一获取子单元,用于运用摄像头获取包含人脸的二维彩色图像,通过模板匹配检测获取人脸关键点坐标进而确定口腔嘴唇的坐标位置;
[0092]
第二获取子单元,用于根据口腔与咽后壁的空间拓扑关系计算出咽后壁的空间坐标区域;
[0093]
在一种实施方式中,咽拭子触觉信息处理单元包括:
[0094]
布置子单元,用于将力觉传感器布置在咽拭子后端与拭子处于一条水平线上;
[0095]
处理子单元,用于基于算数平均完成连续触觉信号处理,确定信号采样频率、采样力觉平均值和力觉域带宽;
[0096]
校正子单元,用于校正咽后壁的深度坐标区域,划定咽拭子有效采样区域的空间坐标。
[0097]
在一种实施方式中,第一获取子单元包括:
[0098]
通过二维彩色图像对嘴部外轮廓进行检测,通过像素坐标系的二维坐标对相机坐标系三维坐标的转换,完成对嘴部关键点在相机坐标系下三维坐标的解算,通过人体嘴部和咽后壁的生理拓扑关系,得到咽后壁空间位置坐标,坐标连接成的连通区域即为定位的咽部区域。
[0099]
综上所述,本公开实施例引入机器人技术进入口咽拭子采样流程,视触融合精准完成口咽部位样本采集,被采集者能根据简单的几步指导,完成“自助式”全流程口咽拭子采样,极大地提升了口咽拭子采样的效率,降低交叉感染风险,建立人机共融智能操作的新型咽拭子采样。具体表现为:
[0100]
1、本公开实施例提供的便携自助式口咽拭子采样机器人为桌面级设备体积,集精确识别、自动采集、智能消杀、安全追溯、快速布署功能于一体,工业标准品元件,配备电池模块,可长时间不间断可靠稳定工作,便于室内、户外的快速部署;
[0101]
2、不同于人工采样、人员遥控操作采样、机器人全自主采样,本公开实施例采用“自助式”机器人咽拭子采样流程设计,全流程无需医生操作干预,被采集者在视频/语音指导下,仅需简单几步即可完成咽拭子采样;
[0102]
3、本公开实施例提供的便携自助式口咽拭子采样机器人采用视
‑
触一体智能识别,充分利用视觉和力觉信息,可靠识别口咽后壁采样区域,高效可靠完成采样任务;
[0103]
4、本公开提供的便携自助式口咽拭子采样机器人配备自主消杀系统,气泵+液泵+雾化器的设计方案能够使消毒液充分雾化,智能控制灭菌,防止用户交叉感染,每当完成一次采集,机器人会对污染区域完成一次消杀,保障机器人连续可靠采样;
[0104]
5、本公开提供的便携自助式口咽拭子采样机器人具有信息溯源的功能,配合射频信息采集器,可对待采集者的信息进行采集,通过人脸识别技术确认身份,保障采集的安全性与完备性,通过信息溯源可采集待采集者的面部信息、力度信息、位置信息等;
[0105]
6、针对机器人的快速维护原则,咽拭子采集机器人采用了模块化设计并配有模块自检,可及时发现机器人的故障位置,并且由于机器人各零部件均为通用标准件,可快速对其故障部件完成更换;
[0106]
7、本公开提供的便携自助式口咽拭子采样机器人体积小,便携,运输与储存都极为便利,整机便于运输至目的地,单人短时间内即可进行快速部署,开机完成自检即可进行口咽拭子采样,采样任务结束后,单人即可完成装箱。
[0107]
实施例2
[0108]
本公开实施例提供了一种便携自助式口咽拭子采样机器人,参见图5,该机器人包括:处理器8
‑
1和存储器8
‑
2,存储器8
‑
2中存储有程序指令,处理器8
‑
1调用存储器8
‑
2中存储的程序指令以使装置执行以下步骤:
[0109]
步骤1:检测状态指示灯、拭子指示灯、采集指示灯工作正常且拭子签安插成功;
[0110]
步骤2:采用基于模板匹配的咽后壁视觉信息处理,完成咽后壁的空间坐标区域确定,并从摄像头坐标系映射到世界坐标系;
[0111]
步骤3:采用基于算数平均的咽拭子触觉信息处理,分析咽拭子的接触力觉,完成咽后壁的深度坐标区域的校正,获取有效采集所需的最小力觉,同时避免对口腔内壁组织的过度损伤;
[0112]
步骤4:综合咽后壁的空间坐标区域、校正后的深度坐标区域实现咽后壁的空间识别和定位。
[0113]
上述的处理器8
‑
1和存储器8
‑
2的执行主体可以是计算机、单片机、微控制器等具有计算功能的器件,具体实现时,本公开实施例对执行主体不做限制,根据实际应用中的需要进行选择。
[0114]
存储器8
‑
2和处理器8
‑
1之间通过总线8
‑
3传输数据信号,本公开实施例对此不做赘述。
[0115]
综上所述,本公开实施例通过上述的操作极大地提升了口咽拭子采样的效率,降低交叉感染风险,建立人机共融智能操作的新型咽拭子采样。
[0116]
实施例3
[0117]
基于同一发明构思,本公开实施例还提供了一种计算机可读存储介质,存储介质包括存储的程序,在程序运行时控制存储介质所在的设备执行上述实施例3中装置步骤。
[0118]
该计算机可读存储介质包括但不限于快闪存储器、硬盘、固态硬盘等。
[0119]
这里需要指出的是,以上实施例中的可读存储介质描述是与实施例中的装置描述相对应的,本公开实施例在此不做赘述。
[0120]
在上述实施例中,可以全部或部分地通过软件、硬件、固件或者其任意组合来实现。当使用软件实现时,可以全部或部分地以计算机程序产品的形式实现。计算机程序产品包括一个或多个计算机指令。在计算机上加载和执行所述计算机程序指令时,全部或部分地产生按照本公开实施例的流程或功能。
[0121]
计算机可以是通用计算机、专用计算机、计算机网络、或者其他可编程装置。计算机指令可以存储在计算机可读存储介质中,或者通过计算机可读存储介质进行传输。计算机可读存储介质可以是计算机能够存取的任何可用介质或者是包含一个或多个可用介质集成的服务器、数据中心等数据存储设备。可用介质可以是磁性介质或者半导体介质等。
[0122]
实施例4
[0123]
本公开实施例对实施例1中的工控机3
‑
1中的基于模板匹配与算数平均的咽后壁视触识别模块进行进一步地介绍,对其他器件不做限制,详见下文描述:
[0124]
该算法根据摄像头采集到的视频图像划定咽后壁的空间坐标,驱动采集机构将咽拭子运送到指定位置,然后根据力觉传感器反馈的数据,采用基于算数平均的咽拭子触觉信息处理,确保有效采集所需的最小力觉。
[0125]
该咽后壁视触识别模块包括:基于模板匹配的咽后壁视觉信息处理单元、基于算数平均的咽拭子触觉信息处理单元、及识别与定位单元;
[0126]
咽后壁视觉信息处理单元,用于采用基于模板匹配的咽后壁视觉信息处理,完成咽后壁的空间坐标区域确定,并从摄像头坐标系映射到世界坐标系;
[0127]
咽拭子触觉信息处理单元,用于采用基于算数平均的咽拭子触觉信息处理,分析咽拭子的接触力觉,完成咽后壁的深度坐标区域的校正,获取有效采集所需的最小力觉,同时避免对口腔内壁组织的过度损伤;
[0128]
识别与定位单元,综合咽后壁的空间坐标区域、校正后的深度坐标区域实现咽后壁的空间识别和定位。
[0129]
通过上述三个单元之间的相互配合使得机器人能自主完成咽后壁的准确识别与定位,为机器替代人完成咽拭子自动采样提供重要的信息参考。
[0130]
应用机器人技术完成咽拭子采样,必须准确定位采样区域。不同于传统遥操作采样机器人的后端人工确认方式,本公开实施例综合运用摄像头和力觉传感器,构建智能识别与定位咽拭子采样的空间有效区域,通过基于模板匹配的咽后壁视觉信息处理利用视觉信息划定咽后壁的空间坐标区域,基于算数平均的咽拭子触觉信息处理对咽后壁的深度坐标区域进行精细校正,综合划定咽拭子有效采样区域(咽后壁)的空间坐标。通过基于模板匹配的咽后壁视觉信息处理应用视觉技术划定咽后壁的空间坐标区域,将摄像头布置在人脸的对面位置,确保采集对象的人脸区域准确获取,获取包含人脸的二维彩色图像,然后通过模板匹配检测,获取68个人脸关键点坐标确定口腔嘴唇的坐标位置,当人张嘴待采集时,其咽后壁和口腔嘴唇具有生理结构的拓扑关系,根据口腔与咽后壁的空间拓扑关系计算出咽后壁的空间坐标区域。
[0131]
即,该咽后壁视觉信息处理单元包括:
[0132]
第一获取子单元,用于运用摄像头获取包含人脸的二维彩色图像,通过模板匹配检测获取人脸关键点坐标进而确定口腔嘴唇的坐标位置;
[0133]
第二获取子单元,用于根据口腔与咽后壁的空间拓扑关系计算出咽后壁的空间坐标区域。
[0134]
进一步地,第一获取子单元包括:
[0135]
检测通过二维彩色图像对嘴部外轮廓进行检测,通过像素坐标系的二维坐标对相机坐标系三维坐标的转换,完成对嘴部关键点在相机坐标系下三维坐标的解算,通过人体嘴部和咽后壁的生理拓扑关系,得到咽后壁空间位置坐标,坐标连接成的连通区域即为定位的咽部区域。
[0136]
基于算数平均的咽拭子触觉信息处理应用力觉域识别技术划定咽后壁的深度坐标区域,将力觉传感器布置在咽拭子后端,与拭子处于一条水平线上。力觉传感器可获取拭子端的受力情况,基于算数平均完成连续触觉信号处理,平衡准确度和灵敏性,确定信号采样频率(n)、采样力觉平均值(m)和力觉域带宽(u),精确校正咽后壁的深度坐标区域。从而获取咽后壁的完整空间坐标,为咽拭子机器采样提供重要信息支撑。
[0137]
即,该咽拭子触觉信息处理单元包括:
[0138]
布置子单元,用于将力觉传感器布置在咽拭子后端与拭子处于一条水平线上;
[0139]
处理子单元,用于基于算数平均完成连续触觉信号处理,确定信号采样频率、采样力觉平均值和力觉域带宽;
[0140]
校正子单元,用于校正咽后壁的深度坐标区域,划定咽拭子有效采样区域的空间坐标。
[0141]
进一步地,该处理子单元包括:
[0142]
力觉传感器根据时序定期的回传检测到的咽拭子末端力度数据,采用基于算数平均的咽拭子触觉信息处理,连续取n个采样值进行算数平均运算;
[0143]
平均值稳定m
±
u时,很好的完成采集流程,在触碰到咽后壁时及时停止。
[0144]
其中,算数平均值≤m
‑
u时,增加进给;相反减少进给,深度方向进给量≤1mm/采样周期。
[0145]
参见图6,该咽后壁视触识别单元的内部工作流程如下所示:
[0146]
1、摄像头实时获取采集对象的人脸信息;
[0147]
2、采用基于模板匹配的咽后壁视觉信息处理,完成咽后壁的空间坐标区域确定,并从摄像头坐标系,映射到世界坐标系;
[0148]
3、采用驱动机构(机械臂、多轴云台等)将咽拭子运送到指定位置;
[0149]
4、采用基于算数平均的咽拭子触觉信息处理,分析咽拭子的接触力觉,完成咽后壁的深度坐标区域的精确校正,确保有效采集所需的最小力觉,同时避免对口腔内壁组织的过度损伤;
[0150]
5、综合咽后壁的空间坐标和深度校正数据,完成咽后壁的空间识别和定位后,可以传输信号告知机器人开始采集。
[0151]
基于模板匹配的咽后壁视觉信息处理通过二维彩色图像对嘴部外轮廓进行检测,通过像素坐标系的二维坐标对相机坐标系三维坐标的转换,完成对嘴部关键点在相机坐标系下三维坐标的解算,通过人体嘴部和咽后壁的生理拓扑关系,得到咽后壁空间位置坐标,坐标连接成的连通区域即为定位的咽部区域。咽部定位算法总共分为以下四个步骤:
[0152]
(1)通过咽拭子采集机器人上部署的相机获取包含人脸的二维彩色图像;
[0153]
(2)通过人脸检测与人脸关键点检测算法,提取二维图像中的68个人脸关键点坐标;
[0154]
(3)参见图7,将像素坐标系中人脸68个关键点坐标中的左右眉顶点坐标(标号18/22/23/27,共四个)、左右眼顶点坐标(标号37/40/43/46,共四个)、鼻子顶点坐标(标号32/36,共两个)、嘴部外轮廓坐标(标号49/51/25/53/55/57/58/59,共8个)、下颚坐标(标号9,共一个)与对应的世界坐标系关键点三维坐标进行匹配,通过pnp(perspective
‑
n
‑
point,n点空间配备)算法与摄像机给定的内参数(图7中方框内,图像坐标系到像素坐标系的变换矩阵与相机镜头畸变参数)解算出相机的外部参数(世界坐标系相对相机坐标系的旋转与平移矩阵[r|t]);
[0155]
(4)通过解算出的旋转与平移矩阵[r|t],及像素坐标系的二维坐标(x,y),获得嘴部外轮廓在相机坐标系下的三维坐标值(x
c
,y
c
,z
c
),形成针对嘴部的包络,完成对嘴部的定位,同时根据解算出的头部位姿信息及时给出调整建议。
[0156]
例如:如果嘴部位置距离采样中心位置偏上大于2cm,就提示采集者其向下调整头部,如偏下大于2cm,提示采集者其向上调整头部,同理适用于左右位置,本公开实施例对此不做赘述。
[0157][0158]
其中,d
x
与d
y
的意义分别为每个像素所占的实际宽度和高度值(像素的物理尺寸,量纲为毫米)。公式(1)表示理想图像坐标系到真实像素坐标系的映射关系。
[0159][0160][0161]
其中,f为相机焦距相机坐标系、世界坐标系(x
w
,y
w
,z
w
)为模板固有指标。由以上公式(1)、公式(2)、公式(3)可推导出下述公式(4),通过公式(4)计算得出参数zc,参数xc,yc的取值与x
w
,y
w
相同。
[0162][0163]
(5)嘴部三维坐标(x
c
,y
c
,z
c
)与咽后壁空间位置(x
m
,y
m
,z
m
)具有生理结构的拓扑关系,参数由临床实验结果完成微调整定。例如:人体正常开口度在4cm
‑
6.5cm之间,咽后壁深度距离嘴部6cm
‑
7cm,咽后壁的平面位置位于嘴部中心点二侧,如图7中可以看出。当由嘴部三维坐标(x
c
,y
c
,z
c
)连接得到嘴部包络线后,其包络线中心点二侧0.6cm
‑
1cm处可划定位咽后壁二个中心点。距离中心点边长r(可设定为0.86mm)的矩形区域为咽后壁平面位置(x
m
,y
m
)。咽后壁深度坐标z
m
为z
c
减去k(可设定为65mm),深度坐标z
m
随后会通过力觉方法进行进一步校正。
[0164]
考虑到咽拭子采样属于半侵入式检备,确保有效性的同时,避免由于一些不可知的原因对人体特别是口腔内壁组织造成潜在危害,咽后壁深度数据必须相当准确。本公开实施例设计了基于算数平均的咽拭子触觉信息处理,使得咽后壁的识别和定位可以通过力觉处理获得更精细的调整,防止采集过程中由于咽拭子抵进咽部的力度过大而对被测人员
造成损伤,减小采集时的不适感,在保证采集有效性的同时实现安全自主化的采集。
[0165]
力觉传感器根据时序定期的回传检测到的咽拭子末端力度数据,采用基于算数平均的咽拭子触觉信息处理,连续取n个采样值进行算数平均运算,n值较大时:信号平滑度较高,但灵敏度较低。n值较小时:信号平滑度较低,但灵敏度较高。平均值稳定m
±
u时,既可以很好的完成采集流程,在触碰到咽后壁时及时停止,而且可以保证采集的安全性,不会使被测人员产生明显的不适感。
[0166]
其中,m、n和u的数值选取,通过大量的临床实验获得,本公开实施例对此不做限制。基于算数平均的咽拭子触觉信息处理流程图如图8所示:
[0167]
(1)咽拭子后端装载力觉传感器;
[0168]
(2)力觉传感器根据时序定期的回传数据;
[0169]
(3)连续取n个采样值进行算数平均运算;
[0170]
(4)算数平均值≤m
‑
u时,需增加力度确保采集有效性,可增加进给;
[0171]
(5)算数平均值>m+u,需减少力度以避免过度损伤,可减少进给;
[0172]
(6)n和u的数值选取,通过大量的临床实验获得;
[0173]
(7)算数平均值调节,需增加进给或减少进给,建议深度方向进给量≤1mm/采样周期。
[0174]
本公开实施例实现了对咽拭子采集过程中的低通滤波,同时具有计算量低、抗随机干扰信号的优势,避免可采集平台振动引起的力反馈数据摄动,减少传感器内部测量误差,排除外部噪声对力反馈数据测量的干扰,能对咽后壁深度坐标z
m
进行可靠修正。
[0175]
综上所述,本公开实施例通过机器视觉、力感触觉,完成口咽拭子区域的准确智能识别,为机器替代人完成咽拭子自动采样提供重要信息参考,推进人机共融智能操作的新型咽拭子采样模式。
[0176]
实施例5
[0177]
本公开实施例对实施例1中的自主消杀系统进行进一步地介绍,对其他器件不做限制,详见下文描述:
[0178]
为避免采集人员之间因接触同一机器而产生交叉感染,本机器人配备自主小型消杀系统,内置于咽拭子采样机器人中,如图9所示的消杀模块2,其由液泵2
‑
1,消毒液储存盒2
‑
2,气泵2
‑
3,雾化喷头2
‑
4组成。其中消毒液储存盒2
‑
2具有液位显示、液体加注和液体释放位置。液泵2
‑
1和气泵2
‑
3通过快接管路将消毒液储存盒2
‑
2与雾化喷头2
‑
4连接起来,两泵同时工作,分别将液体和气体输送到雾化喷头2
‑
4中,雾化喷头2
‑
4将消毒液与空气混合,通过液泵2
‑
1的压力将混合物进行雾化喷射。在每次咽拭子采集过程结束后,立刻对机器人前部进行消毒液喷雾消杀,保证使用者安全的连续性采集。消毒液存储装置(消毒液储存盒2
‑
2)位于机器人内部,消毒液加注口2
‑
5位于箱体外部,旋开盖子,即可方便的进行消毒液加注。消毒液释放口2
‑
6位于箱体下部,在每次使用咽拭子采集机器人后,需要释放消毒液存储装置中的剩余消毒液。消毒液加注口2
‑
5与消毒液释放口2
‑
6之间设有液位显示,方便观察剩余消毒液量,便于及时添加消毒液,如图10所示。
[0179]
本机器人采用的是气泵+液泵+雾化器的设计方案,消毒液能够快速雾化,在每次采集过程结束后,对机器人污染的区域进行彻底消杀,消杀结束后,不会造成消毒液残留,避免二次污染。
[0180]
实施例6
[0181]
本公开实施例对实施例1中的头托进行进一步地介绍,对其他器件不做限制,详见下文描述:本公开实施例设计了一种含有压力传感器的头托,如图11所示。本公开实施例针对人体头部以及下巴的特点,结合人体工学设计了更加贴合额头以及下巴的半包围式头托结构。额头部分和下巴垫均采用倾斜式结构,使得使用者在使用时头部可以保持一个倾斜的角度,更加方便使用者能够保持口腔以及咽部的裸露,从而方便采样机构的有效采样。
[0182]
该头托装置由头托支架9、下巴垫12、微动开关11、弹簧10、额部支撑15、电源线13和航空插头14组成,其中,微动开关11采用12*12*6点触微动开关。
[0183]
该装置可以通过限制以及固定人体头部,配合微动开关11确保头部贴合,辅助咽拭子机器采集,避免待采集者由于心理恐惧偏离正确采集位置。
[0184]
在图11中,头托支架9可通过螺钉与其它设备进行连接,弹簧10设置在头托支架9的柱形槽17之中,微动开关11设置在头托支架9的矩形槽16之中,并且通过头托支架9上的孔位与电源线13连接,电源线13与航空插头14连接,下巴垫12上的孔位与弹簧10连接,从而与头托支架9连接成为一个整体。
[0185]
该装置从实际出发,针对人体头部以及下巴的特点,设计了一款更加贴合额头以及下巴的半包围式头托结构,额部支撑15和下巴垫12均采用倾斜式结构,使得使用者在使用时头部可以保持向上倾斜的角度,更加方便保持口腔以及咽部的裸露。两侧的柱状结构也方便使用者把持。
[0186]
本公开实施例在下巴垫12处加入了微动开关11,信号通过航空插头14与其他设备进行连接,以便确认使用者的头部是否紧固放置在下巴垫12处,保证全采样流程中的头部位置固定。当待采集者因为心理恐惧和生理不适,向后、左、右进行运动,会触发微动开关11。下巴垫12的下方通过弹簧10的阻尼结构,无人使用时弹簧10回弹保证了头托装置工作的连续性以及可靠性,并且增加了使用者在使用时的舒适度。头托装置的额部支撑15和下巴垫12都使用了圆润式设计(即无尖点),保证了使用者在采集时的安全性。
[0187]
在实际使用过程中,如图11所示,使用者需要将下巴托在下巴垫12上,带动下巴垫12挤压弹簧10,从而使下巴垫12接触并按压微动开关11,使电路接通,同时使用者的额头紧贴额部支撑15,使用者的双手握住头托支架9的两侧柱状结构,使头部固定稳定,从上、下、左、右、前、后等多方位固定了使用者的头部位置,从而为咽拭子机器采样的快速、便捷、准确的开展提供硬件支撑。
[0188]
本公开实施例设计的头托的整体结构采用圆润式设计,在使用者使用过程中,能够在固定使用者头部的同时保证使用者的安全性及舒适性。头托装置的额部支撑15及下巴垫12均采用倾斜式结构,额部支撑15相对下巴垫12更接近使用者70mm,因此使用者在使用时能够保持头部微微上扬姿势,能更好地暴露使用者的咽喉部位,方便后续检查。
[0189]
下巴垫12的下部采用弹簧阻尼结构,在无人使用时候,支撑机构能够及时回弹,保证了头托工作的连续性以及可靠性,并且提高了使用者在使用时的舒适度。下巴垫12的下部加入了微动开关11,可通过航空插头14与其他设备进行连接,通过获取微动开关11的数据判断使用者是否压紧下巴垫12,及时进行提示,使得整个头托装置对咽拭子采样起到更好的辅助作用。
[0190]
综上所述,本公开实施例通过含有压力传感器的头托,内置传感器可实时检测采
样过程中头部是否一直放置在头托上,头托的上下部分具有小角度错位,使得采样人员的头部略微后倾,确保采样人员处于正确位置。
[0191]
实施例7
[0192]
本公开实施例对实施例1中的抛物双曲面设计的咬口器进行进一步地介绍,对其他器件不做限制,详见下文描述:
[0193]
本公开实施例设计了一种抛物双曲面设计的咬口器,如图12所示。
[0194]
该咬口器由牙齿位置定位模块18、双曲面口腔支撑模块20和压舌模块19组成。
[0195]
在双曲面口腔支撑模块20的上部和下部分别设置有牙齿位置定位模块18,双曲面口腔支撑模块20的下部又与压舌模块19连接。上述牙齿位置定位模块18、双曲面口腔支撑模块20和压舌模块19通过注塑方法一体成型。
[0196]
牙齿位置定位模块18由上下两个短板(凸台)构成,其主要作用是,在被采集者佩戴口腔支撑装置时进行定位,确定牙齿咬住的位置,使牙齿紧贴上下两个短板里面。
[0197]
双曲面口腔支撑模块20呈双曲抛物面状,主要起支撑的作用。同时,其形状更加符合口腔的构造,使之与口腔更贴合,且尺寸大小合适,增加舒适度。
[0198]
压舌模块19仿照人类舌头形状,佩戴时与舌头更贴合,能完美压住舌根在内的整个舌头,保证咽拭子采集顺利完成。
[0199]
在图12中,该咬口器在使用过程中通过牙齿位置定位模块18固定在使用者口腔中的位置,通过双曲面口腔支撑模块20撑起使用者口腔,便于咽拭子的采集,通过压舌模块19下压使用者的舌根,避免采集过程中舌头对采集机构造成干扰。
[0200]
实际应用时,参见图12,该咬口器通过牙齿位置定位模块18、双曲面口腔支撑模块20固定牙齿位置,扩张口腔,能够减缓使用者在咽拭子采样过程中长时间张口产生的不舒适感。通过弧形舌头状的压舌模块19压低舌根,对舌头起到固定作用,使口腔与咽喉部位充分暴露,便于咽拭子顺利采样到样本。
[0201]
充分考虑使用者的舒适度,对于压舌模块19容易造成口腔异物引发恶心呕吐等不舒适感的问题,合理控制压舌模块19的长度,使其头部不会深入咽喉顶到扁桃体。
[0202]
考虑使用人群的差异化和性别,本公开实施例设计的咬口器通过调整压舌模块19的宽度和双曲面口腔支撑模块20的长度及宽度,得到大号、中号和小号三种型号。
[0203]
其中,参见图13和图14,咬口器的外廓宽度21的大号、中号、小号尺寸分别为49mm、47mm、44mm;内弧宽度22的大号、中号、小号分别为36mm、31mm、25mm;压舌模块的长度23的大号、中号、小号均为58mm;双曲面口腔支撑模块的内弧长度24的大号、中号、小号分别为55mm、50mm、45mm;压舌模块的宽度25的大号、中号为34mm,小号为30mm。
[0204]
使用者可根据自身口腔大小以及对口腔支撑物的舒适程度对上述尺寸进行选择。其制作材料为abs m30i医用材料,保证卫生安全。
[0205]
通过咬口器的使用与正确佩戴能够避免待采集者因为心理畏惧的口腔闭合和舌部干扰,保证待采样者咽后壁的充分暴露,提高后续采样机构采样的准确性与有效性。
[0206]
综上所述,本公开实施例通过设计了抛物双曲面咬口器,在正确佩戴后,可充分暴露采样者的咽后壁,通过压舌板可有效避免采样过程中舌部运动的干扰。
[0207]
实施例8
[0208]
本公开实施例对实施例1中的含有力觉传感器的采样机构进行进一步地介绍,对
其他器件不做限制,详见下文描述:本公开实施例设计了一种含有力觉传感器的采样机构,如图15和16所示。该采样机构包括:咽拭子26、拭子架28、弹簧片27、微动开关29、微动开关支架30、直线轴承32、轴承架31、力觉传感器34、法兰33、旋转舵机35、底部支架36。力觉传感器34的型号为sbt760b
‑
5n,其最大量程为5n。旋转舵机35型号为ds3218,最大负载20kg。
[0209]
底部支架36的顶部设置有旋转舵机35,底部支架36的底部设置有便捷接口;旋转舵机35通过法兰33固定力觉传感器34;法兰33与轴承架31的后部连接,轴承架31的前部安装有直线轴承32;直线轴承32与微动开关支架30的底部定位连接,用于触发力觉传感器34,微动开关支架30的前部用于固定微动开关29;微动开关支架30的前部还与拭子架28固定连接,拭子架28的上部嵌入弹簧片27用于固定咽拭子26。
[0210]
咽拭子26可由人工或机器完成咽拭子装载,到达限位后,才能触发采样机构前部的微动开关29,以确保装载成功。采样机构前部的弹簧片27确保压紧咽拭子26,避免采集过程中的脱落。采样机构的中部装有旋转舵机35,在咽拭子26到达咽后壁时,可驱动咽拭子26进行旋转运动,增大采样面积。采样机构的后部装有力觉传感器34,可实时反馈采集机构的末端受力,避免采集力度过大或过小,保证采集过程的安全性及有效性。
[0211]
并且,底部支架36后置有便捷接口,机构后置集成的电源、信号、报警接口,安装方便,维修替换便捷,方便与多种运动机构(机械臂、三轴云台等)集成,极大地提升了咽拭子机器采样的效率和可靠性,为咽拭子机器的采样提供硬件支撑。
[0212]
参见图15和16,旋转舵机35及后置的便捷接口均通过螺钉与其他设备进行连接,力觉传感器34通过法兰33安装在旋转舵机35的前部,微动开关29与力觉传感器34的使用,不仅能确定咽拭子26是否安装到位,也便于力觉传感数据的采集。
[0213]
咽拭子26可由人工或机器完成咽拭子装载,到达限位后,才能触发装置前部的微动开关29,以确保装载成功。采样机构前部的弹簧片27确保压紧咽拭子26,避免采集过程中的脱落。
[0214]
采样机构中部装有旋转舵机35,在采样机构到达咽后壁时,可驱动咽拭子26进行旋转运动,为运动机构提供额外自由度,提供可靠的弧线采样曲线,增大采样面积。
[0215]
采样机构后部装有力觉传感器34,可实时反馈采集机构末端受力,避免采集力度过大损伤咽后壁组织,或采集力过小导致采集样本细胞数量不足,保证采集过程的安全性及有效性。
[0216]
综上所述,通过本公开实施例设计的含有力觉传感器的采样机构,可自动检测咽拭子26的装载情况,驱动咽拭子26完成旋转运动,检测咽拭子26的受力情况,从咽拭子26的装载,末端运动、力觉控制等多方面提升了咽拭子机器采样的效率和可靠性。
[0217]
实施例9
[0218]
咽拭子采样机器人采用了模块化设计,各个模块之间协调配合工作,使得咽拭子采集效率得到极大地提高,并且每个模块都配有模块自检功能,可及时发现机器人的故障位置,节约维修成本与时间。
[0219]
参见图17,故障检测分为运行前检测和运行中检测,运行前检测可检测出舵机是否连接正常、电池电量获取是否正常、头托传感器是否正确连接,运行中故障检测可检测出检测过程中轴体是否超限位、电池电量是否充足、消毒液是否充足等。本机器人零件选型均采用工业标准品元件,能够快速对问题元件进行更换,重新进入到工作状态,保障咽拭子机
器人工作的连续性。
[0220]
便携自助式口咽拭子采样机器人还具有信息溯源的功能,配合外置的射频信息采集器,可对待采集者的信息进行采集,即:通过摄像头对采集者进行拍照采集,力度信息通过采集机构的力觉传感器获得,位置信息通过咽后壁识别部分获得,信息溯源模块将获得的信息存储在数据库中,即可采集待采集者的面部信息、力度信息、位置信息等。
[0221]
相对于传统的医疗机械,本便携自助式口咽拭子采样机器人体积小,便携,运输与储存都极为便利,单人就能够进行快速部署,耗时不超过5分钟。机器人可整体进行运输至目的地可整机进行快速部署,开机后进行简单调试,即可进行检测。本便携自助式口咽拭子采样机器人的收纳存储也非常便利,将外置的头托6及传感器拔下即可装箱运输或者存储。图18为便携自助式口咽拭子采样机器人部署流程。
[0222]
综上所述,本公开针对新冠疫情期间的核酸检测咽拭子采样需求,具备快捷部署能力,通过机器人的辅助智能采样,有效减轻医护人员工作量,减少医护工作者与被检测者接触,降低交叉感染风险。机器人具有自主消杀功能,提供采集生物安全性保障,可实现连续可靠采样,采样全流程有效、安全、可追溯。通过引入机器人技术进入口咽拭子采样流程,视触融合精准完成口咽部位样本采集,被采集者能根据简单的几步指导,完成“自助式”全流程口咽拭子采样,极大地提升了口咽拭子采样的效率,建立人机共融智能操作的新型口咽拭子采样方法。
[0223]
本公开实施例对各器件的型号除做特殊说明的以外,其他器件的型号不做限制,只要能完成上述功能的器件均可。
[0224]
本领域技术人员可以理解附图只是一个优选实施例的示意图,上述本公开实施例序号仅仅为了描述,不代表实施例的优劣。
[0225]
以上所述仅为本公开的较佳实施例,并不用以限制本公开,凡在本公开的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本公开的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1