一种手持式多自由度微创手术器械
1.本发明属于医疗器械领域,属于一种穿戴于手腕进行操作的微创手术器械,其多自由度从操作臂可映射医生手部动作。
背景技术:
2.相比于传统开放性手术,微创手术凭借其创口小、疼痛轻、回复好等优势得到广泛应用。而用于微创手术的传统手动医疗器械在患者体内的灵活性有限,手术切口处存在的“杠杆效应”使医生很难完成手眼协调的一致性操作。手术机器人系统提供了多自由度的医疗器械,灵活性高,但由于手术机器人和相关辅助设备主要依赖从国外进口,成本很高。并且国内医疗资源分布的不均衡,很多病患的经济能力往往难以够承受手术机器人系统的高额治疗费。这推动了多自由度、灵活性高和低成本微创手术器械的研发。其相比于价格昂贵的微创机器人手术系统,便于普及和广泛运用。因此手持式多自由度微创手术器械的研发具有重要意义。
技术实现要素:
3.本发明的目的是克服上述背景技术中的不足,提供一种手持式多自由度微创手术器械,以解决传统手动医疗器械手眼协调不一致和手术机器人系统治疗成本高昂等问题。
4.本发明提供的技术方案是:
5.一种手持式多自由度微创手术器械,其特征在于:包括依次连接的操作手柄组件、驱动箱组件和从操作臂组件;
6.所述操作手柄组件包括中部开设有内圈以方便穿戴在手腕上的方形框体、通过第一磁编码器组件与方形框体外壁转动连接的第一柔性链、通过第二磁编码器组件与方形框体外壁转动连接的第二柔性链以及与第一柔性链和第二柔性链铰接的操作手柄;
7.所述驱动箱组件包括依次布置的电机壳、隔离板、绕线壳和底座、固定在隔离板上并将电机壳和绕线壳可拆卸地连接为一体的至少两组快速更换接口组件、安装在电机壳内且相互平行的三个电机以及安装在绕线壳内且分别与三个电机一一对应的三组绕线组;所述电机壳外壁通过中间板与方形框体固定连接;三个电机分别为第一电机、第二电机和第三电机;
8.所述从操作臂组件包括固定连接在底座上且轴向贯通的钢丝绳导向管、用于映射操作手柄动作的末端执行器以及安装在钢丝绳导向管与末端执行器之间以映射手腕动作的活动关节;所述活动关节包括依次铰接的第一关节、第二关节、第三关节和第四关节;所述第一关节与钢丝绳导向管相铰接;所述第四关节与末端执行器固定连接;四个关节以及末端执行器分别通过钢丝绳与一组绕线组相连接。
9.所述第一磁编码器组件包括与方形框体固定连接的第一磁编码器外壳、一端与第一柔性链固定连接且另一端可转动地定位在第一磁编码器外壳内部的第一转动轴、设置在第一磁编码器外壳内部且与第一转动轴固定连接的第一磁性元件、固定在第一次编码器外
壳内壁并与第一磁性元件位置相对应的第一读数传输单元。
10.所述第二磁编码器组件包括与方形框体固定连接的第二磁编码器外壳、一端与第二柔性链固定连接且另一端可转动地定位在第二磁编码器外壳内部的第二转动轴、设置在第二磁编码器外壳内部并与第二转动轴固定连接的第二磁性元件、固定在第二次编码器外壳内壁并与第二磁性元件的位置相对应的第二读数传输单元;所述第一转动轴的轴线和第二转动轴的轴线均穿过内圈的圆心且相互垂直。
11.所述第一柔性链和第二柔性链均由若干结构相同的链体单元依次铰接而成。
12.所述操作手柄包括内部设置成空腔的壳体、一端伸入至空腔内并通过第三转动轴与壳体内壁转动连接的捏合开关、一端固定连接壳体内壁且另一端固定连接捏合开关的拉簧以及用于检测捏合开关动作的第三磁编码器组件;所述第三磁编码器组件包括固定在第三转动轴上的第三磁性元件以及固定在壳体上并与第三磁性元件的位置相对应的第三读数传输单元。
13.每组绕线组均包括一端可转动地定位在底座上且另一端与对应电机的电机轴固定连接的绕线轮以及可转动地定位在底座上的导向轮;所述导向轮位于绕线轮靠近底座中心的一侧。
14.所述快速更换接口组件包括固定在隔离板上且两端分别与电机壳和绕线壳卡扣连接的卡扣杆、穿过电机壳侧壁并与卡扣杆抵顶连接的第一按钮以及穿过绕线壳侧壁并与卡扣杆抵顶连接的第二按钮;所述电机壳和绕线壳侧壁均开设有便于第一按钮和第二按钮伸入的孔眼。
15.四个关节中,每个关节两端均连接有一根钢丝绳,并且两根钢丝绳反向固定绕设在同一根绕线轮上,使得绕线轮在转动时,带动相应关节作倾斜运动。
16.所述第一关节和第三关节通过钢丝绳连接在与第一电机相对应的绕线轮上,以便由第一电机带动第一关节和第三关节同时运动;所述第二关节和第四关节通过钢丝绳连接在与第二电机相对应的绕线轮上,以便由第二电机带动第二关节和第四关节同时运动。
17.所述末端执行器包括固定在第四关节上的中间轴、与中间轴固定连接的上钳以及与中间轴转动连接并与上钳相互配合的下钳;所述下钳通过钢丝绳与第三电机相对应的绕线轮连接
18.本发明的有益效果是:
19.本发明能够有效解决传统手术器械不灵活,不能完成复杂手术操作和手术机器人系统治疗成本高昂的问题,同时模块化结构设计提高了微创手术机器人的利用率,降低了微创手术机器人应用成本。
附图说明
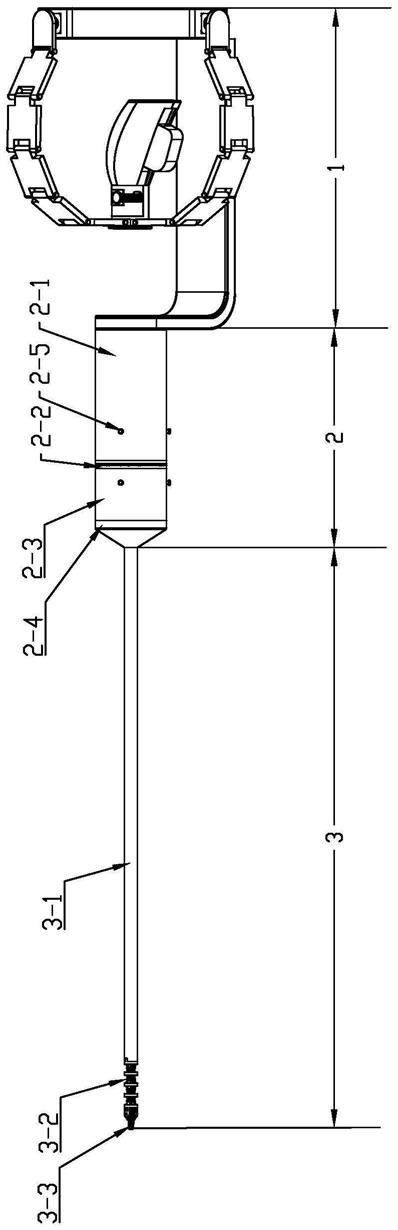
20.图1是本发明的整体结构示意图。
21.图2是本发明操作手柄组件的结构示意图。
22.图3是本发明第一磁编码器组件和操作手柄的剖视图。
23.图4是图3的a部放大图。
24.图5是图3的b部放大图。
25.图6是本发明第二磁编码器组件的剖视图。
26.图7是图6的c部放大图。
27.图8是本发明驱动箱组件的结构示意图(省略电机壳和绕线壳)。
28.图9是本发明从操作臂组件的结构示意图。
29.附图标号:
30.1、操作手柄组件;1
‑
1、方形框体;1
‑
2、内圈;1
‑
3、第一磁编码器组件;1
‑3‑
1、第一磁编码器外壳;1
‑3‑
2、第一转动轴;1
‑3‑
3、第一磁性元件;1
‑3‑
4、第一读数传输单元;1
‑3‑
5、轴承;1
‑
4、第一柔性链;1
‑4‑
1、链体单元;1
‑
5、第二磁编码器组件;1
‑5‑
1、第二磁编码器外壳;1
‑5‑
2、第二转动轴;1
‑5‑
3、第二磁性元件;1
‑5‑
4、第二读数传输单元;1
‑
6、操作手柄;1
‑6‑
1、壳体;1
‑6‑
2、第三读数传输单元;1
‑6‑
3、捏合开关;1
‑6‑
4、拉簧;1
‑6‑
5、第三磁性元件;1
‑
7、第二柔性链;
31.2、驱动箱组件;2
‑
1、电机壳;2
‑
2、隔离板;2
‑
3、绕线壳;2
‑
4、底座;2
‑
5、快速更换接口组件;2
‑5‑
1、卡扣杆;2
‑5‑
2、第一按钮;2
‑5‑
3、第二按钮;2
‑5‑
4、卡钩;2
‑
6、第一电机;2
‑
7、第二电机;2
‑
8、第三电机;2
‑
9、中间板;2
‑
10绕线轮;2
‑
11、导向轮;2
‑
12、支架;2
‑
13、联轴器;
32.3、从操作臂组件;3
‑
1、钢丝绳导向管;3
‑
2、活动关节;3
‑2‑
1、第一关节;3
‑2‑
2、第二关节;3
‑2‑
3、第三关节;3
‑2‑
4、第四关节;3
‑
3、末端执行器;3
‑3‑
1、下钳;3
‑3‑
2、上钳;3
‑3‑
3、中间轴;3
‑
4、钢丝绳。
具体实施方式
33.以下结合附图所示的实施例进一步说明。
34.如图1所示的手持式多自由度微创手术器械,包括依次连接的操作手柄组件1、驱动箱组件2和从操作臂组件3。该器械的操作手柄组件可穿戴于医生手腕部,并可对手腕动作进行解耦,驱动箱组件接收解耦信号后通过钢丝绳3
‑
4控制从操作臂组件动作,从而将医生的手腕动作映射至从操作臂。
35.如图2所示,所述操作手柄组件包括方形框体1
‑
1、第一磁编码器组件1
‑
3、第一柔性链1
‑
4、第二磁编码器组件1
‑
5、第二柔性链1
‑
7和操作手柄1
‑
6。所述方形框体的中部开设有内圈1
‑
2,以方便穿戴于医生的手腕上。所述第一柔性链通过第一磁编码器组件与方形框体外壁转动连接;所述第二柔性链通过第二磁编码器组件与方形框体外壁转动连接。所述第一柔性链和第二柔性链均与操作手柄相铰接。
36.如图3、图4所示,所述第一磁编码器组件包括第一磁编码器外壳1
‑3‑
1、第一转动轴1
‑3‑
2、第一磁性元件1
‑3‑
3和第一读数传输单元1
‑3‑
4。所述第一磁编码器外壳与方形框体固定连接(方形框体的侧壁开设有凹槽,第一磁编码器外壳嵌装在凹槽内);所述第一转动轴的一端与第一柔性链固定连接,第一转动轴的另一端通过轴承1
‑3‑
5转动连接在第一磁编码器外壳的内壁。所述第一磁性元件设置在第一磁编码器外壳的内部,并且第一磁性元件的一侧与第一转动轴的端部固定连接,第一磁性元件另一侧与第一读数传输单元的位置相对应;所述第一读数传输单元固定在第一次编码器外壳的内壁,用于检测第一转动轴的转动角度。
37.如图6、图7所示,所述第二磁编码器组件和第一磁编码器组件的结构相类似。具体地,所述第二磁编码器组件包括第二磁编码器外壳1
‑5‑
1、第二转动轴1
‑5‑
2、第二磁性元件
1
‑5‑
3和第二读数传输单元1
‑5‑
4。所述第二磁编码器外壳与方形框体固定连接(方形框体的侧壁开设有凹槽,第二磁编码器外壳固定在凹槽内);所述第二转动轴的一端与第二柔性链固定连接,第二转动轴的另一端通过轴承转动连接在第二磁编码器外壳的内壁。所述第二磁性元件设置在第二磁编码器外壳的内部,并且第二磁性元件的一侧与第二转动轴的端部固定连接,第二磁性元件另一侧与第二读数传输单元的位置相对应;所述第二读数传输单元固定在第二次编码器外壳的内壁,用于检测第二转动轴的转动角度。
38.作为优选,所述第一转动轴的轴线和第二转动轴的轴线均穿过内圈的圆心且相互垂直,以方便对手腕动作进行解耦(将手腕动作在相互垂直的方向上进行分解)。
39.如图2所示,所述第一柔性链和第二柔性链均由若干结构相同的链体单元1
‑4‑
1依次铰接而成。第一柔性链的一端与第一转动轴固定连接,另一端与操作手柄铰接;第一柔性链的一端与第一转动轴固定连接,另一端与操作手柄铰接;第二柔性链的一端与第二转动轴固定连接,另一端与操作手柄铰接。工作时,医生通过内圈将方形框体穿戴在手腕部,对操作手柄的位置进行操控,操作手柄的位置变化带动第一柔性链和第二柔性链动作,进而将腕部动作传输至第一转动轴和第二转动轴上,由第一磁编码器组件和第二磁编码器组件分别读取第一转动轴和第二转动轴的转动信号,进而通过驱动箱组件将医生腕部动作映射至从动臂组件。
40.如图3、图5所示,所述操作手柄包括壳体1
‑6‑
1、捏合开关1
‑6‑
3、拉簧1
‑6‑
4和第三磁编码器组件。所述壳体内部设置成空腔;壳体由左壳体和右壳体通过螺钉固定连接而成。所述捏合开关的一端伸入至空腔内并转动连接在左壳体和右壳体的内壁上,另一端露出壳体,以便医生按压捏合开关。所述拉簧的一端固定连接壳体内壁,另一端固定连接捏合开关;当医生按压捏合开关后,捏合开关可在拉簧的弹力作用下进行自动复位。所述第三磁编码器组件用于检测捏合开关的动作;第三磁编码器组件包括第三磁性元件1
‑6‑
5和第三读数传输单元1
‑6‑
2;其中,第三磁性元件固定在第三转动轴上,第三读数传输单元固定在壳体上并与第三磁性元件的位置相对应。
41.如图8所示,所述驱动箱组件包括电机壳2
‑
1、隔离板2
‑
2、绕线壳2
‑
3、底座2
‑
4、至少两组(本实施例为三组)快速更换接口组件2
‑
5、三个电机(分别为第一电机2
‑
6、第二电机2
‑
7和第三电机2
‑
8)和三组绕线组。所述电机壳、隔离板、绕线壳和底座依次布置;其中,电机壳外壁通过中间板2
‑
9与方形框体固定连接,底座与从操作臂组件固定连接。
42.所述快速更换接口组件固定在隔离板上,用于将电机壳和绕线壳可拆卸地连接为一体。所述快速更换接口组件包括卡扣杆2
‑5‑
1、第一按钮2
‑5‑
2和第二按钮2
‑5‑
3;所述卡扣杆固定在隔离板上且两端分别与电机壳和绕线壳卡扣连接(卡扣杆两端设置有卡钩2
‑5‑
4)。所述第一按钮穿过电机壳侧壁并与卡扣杆抵顶连接;所述第二按钮穿过绕线壳并与卡扣杆抵顶连接;作为优选,第一按钮和第二按钮分别抵顶在卡扣杆的两个卡钩处。对应地,所述电机壳和绕线壳侧壁均开设有便于第一按钮和第二按钮伸入的孔眼。当电机壳和绕线壳在连接状态时,卡扣杆的两端分别通过卡钩与电机壳和绕线壳卡扣连接;当需要拆卸时,先按下第一按钮,使卡扣杆与电机壳脱离,即可取下电机壳,然后按下第二按钮,使卡扣杆与绕线壳脱离,即可取下绕线壳,方便医生对驱动箱组件内的部件进行消毒和更换。作为优选,第一按钮和第二按钮关于驱动箱组件的中心轴对称设置,以方便医生单手拆卸。
43.三个电机相互平行且均安装在电机壳内,其中电机的壳体通过螺钉与电机壳固定
连接。三组绕线组均安装在绕线壳内且分别与三个电机一一对应;每组绕线组均包括绕线轮2
‑
10和导向轮2
‑
11。所述绕线轮一端通过轴承可转动地定位在底座上,另一端穿过隔离板后通过联轴器2
‑
13与对应电机的电机轴固定连接;所述导向轮通过支架2
‑
12可转动地定位在底座上。作为优选,所述导向轮位于绕线轮靠近底座中心的一侧,以方便钢丝绳的走线。
44.如图9所示,所述从操作臂组件包括依次连接的钢丝绳导向管3
‑
1、活动关节3
‑
2和末端执行器3
‑
3。所述钢丝绳导向管固定连接在底座上且轴向贯通(底座中心开设有便于钢丝绳穿过的穿孔,钢丝绳导向管连接在穿孔处)。所述活动关节安装在钢丝绳导向管与末端执行器之间,用于映射医生腕部动作。所述末端执行器用于映射操作手柄动作。
45.所述活动关节采用模块化结构实现手腕动作,包括依次铰接的第一关节3
‑2‑
1、第二关节3
‑2‑
2、第三关节3
‑2‑
3和第四关节3
‑2‑
4;其中,第一关节与钢丝绳导向管相铰接,第四关节与末端执行器固定连接。四个关节分别通过钢丝绳与其中一组绕线组相连接。具体地,每个关节两端均连接有一根钢丝绳,两端的两根钢丝绳穿过钢丝绳导向管后,经过导向轮,最后反向固定绕设在同一根绕线轮上,使得绕线轮在转动时,其中一根钢丝绳伸长,而另一根钢丝绳缩短,从而带动相应的关节倾斜运动。
46.本实施例中,所述第一关节和第三关节通过钢丝绳连接在与第一电机相对应的绕线轮上,以便由第一电机带动第一关节和第三关节同时运动;所述第二关节和第四关节通过钢丝绳连接在与第二电机相对应的绕线轮上,以便由第二电机带动第二关节和第四关节同时运动。其中,钢丝绳导向管与第一关节的铰接轴以及第二关节与第三关节的铰接轴相互平行;第一关节与第二关节的铰接轴以及第三关节与第四关节的铰接轴相互平行;第一关节与第二关节的铰接轴以及第二关节与第三关节的铰接轴相互垂直。工作时,可通过第一电机来控制第一关节和第三关节的俯仰角度,通过第二电机来控制第二关节和第四关节的偏航角度,从而保证四个关节准确复现医生腕部动作。
47.所述末端执行器包括下钳3
‑3‑
1、上钳3
‑3‑
2和中间轴3
‑3‑
3。所述中间轴固定在第四关节上;所述上钳与中间轴固定连接;所述下钳与中间轴转动连接并与上钳相互配合;所述下钳通过钢丝绳与第三电机相对应的绕线轮连接。本实施例中,下钳连接有两根钢丝绳,并且两根钢丝绳依次穿过四个关节的铰接轴中心后反向绕设在绕线轮上,当第三电机转动时,其中一根钢丝绳伸长而另一根钢丝绳缩短,从而实现上钳与下钳的开合动作。
48.本发明中还设置有控制器(采用单片机或plc控制器,图中未显示),控制器分别与各读数传输单元以及各电机连接,以实现整体的工作配合。
49.本发明的工作原理如下:
50.本发明应用于腹腔微创手术治疗,手术开始时,医生通过将内圈将该器械穿戴于手腕部,将从操作臂通过人体表面的一个小孔(即该器械运动过程中的不动点)插入充满气体的腹腔内。然后医生的腕部运动经过第一柔性链和第二柔性链解耦后,传输到第一转动轴和第二转动轴上,进而由第一磁编码器组件和第二磁编码器组件读取相应转动轴的运动信息,控制第一电机和第二电机转动特定角度,通过联轴器传输到对应的绕线轮,使对应的绕线轮转动特定角度,进而带动与绕线轮固连的钢丝绳运动,钢丝绳收缩或伸长,带动与其连接的四个关节运动,实现末端执行器的俯仰、偏航。
51.从操作臂绕轴向的转动通过医生转动手柄带动手术器械转动实现。
52.末端执行器的开合通过操作手柄的捏合开关实现,捏合开关的复位和捏合对应上钳与下钳的开合。当医生捏合开关时,带动第三转动轴转动,对应的第三磁编码器组件读取第三转动轴的运动信息后,传输到第三电机,第三电机便会转动特定角度,第三电机的运动通过联轴器传输到对应的绕线轮,绕线轮转动特定角度,带动连接下钳的钢丝绳运动,通过钢丝绳收缩或伸长,带动下钳绕中间轴转动,从而实现上钳与下钳的开合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1