一种全自动骨钻清洗机的制作方法
1.本发明涉及医疗器械清理技术领域,具体为一种全自动骨钻清洗机。
背景技术:
2.骨钻,外科手术中在骨骼上钻孔用的电动工具,适用于提供机械动力实施骨组织手术中,骨钻即骨科钻头,为在骨科手术过程中高频使用的工具,用于钻孔、攻螺纹,尤其适用于骨科创伤手术中的四肢长骨钻孔,如:骨科手术中常常需要骨钻预先钻孔后再置入螺钉固定,或者钻孔制造微骨折进行关节融合术。
3.现有的全自动骨钻清洗存在的缺陷是:当骨钻清洗时,需要医护人员手动进行清洗,进而导致清洗步骤繁琐,造成耗时费力,且清洗质量不稳定的情况发生。
4.因此需要研发一种全自动骨钻清洗机很有必要。
技术实现要素:
5.本发明的目的在于提供一种全自动骨钻清洗机,通过设有清洗机构,将储水罐和储酶洗液罐由电机水泵组接通透明水罐,并将骨钻安装在清洗机构上,可进行清洗处理,通过清洗机构中由伺服电机进行驱动,实现了骨钻清洗机进行全自动化操作,同时具有酶洗和水洗效果,则每次清洗过程中自动更换清洗液,避免交叉污染的情况,以解决上述背景技术中提出骨钻需要人工进行手动清洗处理的问题。
6.为实现上述目的,本发明提供如下技术方案:一种全自动骨钻清洗机,包括清洗机本体,所述清洗机本体的底端一侧安装有储水罐,所述清洗机本体的底端另一侧安装有储酶洗液罐,所述清洗机本体的内部顶端安装有控制电气箱,所述清洗机本体的内部后端下方安装有安装架,所述清洗机本体的内部中心位置安装有操作台,所述操作台的顶部两侧均安装有清洗机构。
7.优选的,所述储水罐的底部中心位置安装有水位监测传感器a。
8.优选的,所述储酶洗液罐的底部中心位置安装有水位监测传感器b。
9.优选的,所述控制电气箱的前端面两侧均安装有启动按钮,所述控制电气箱的前端面中心位置安装有触摸显示屏。
10.优选的,所述安装架的前端面两侧均安装有电磁截止阀,所述安装架的前端面中心位置均安装有电机水泵组,所述电机水泵组上的进水端安装有水管。
11.优选的,所述操作台的顶部两侧均安装有透明水罐,所述透明水罐的一侧外壁上方安装有进水口,所述透明水罐的一侧外壁下方安装有出水口。
12.优选的,所述清洗机构包括模组滑台,所述模组滑台的一端贯穿操作台与伺服电机的一端固定连接,所述伺服电机上的输出轴与模组滑台内的转轴转动连接。
13.优选的,所述模组滑台的前端面上方安装有夹紧装置,所述夹紧装置的前端面上方安装有骨钻夹,所述夹紧装置的前端面下方安装有串行总线舵机。
14.与现有技术相比,本发明的有益效果是:
15.通过将清洗机构上的模组滑台安装在操作台上,并将伺服电机上的输出轴与模组滑台内的转轴转动连接,启动伺服电机,带动模组滑台上的转轴进行正转或反转,通过在模组滑台上安装夹紧装置,并将夹紧装置的后端与转轴上的外螺纹螺纹连接,使转轴正转或反转,带动夹紧装置进行上下移动,通过将夹紧装置的前端安装骨钻夹,使骨钻安装在骨钻夹上,进行清洗前安装与固定,通过将骨钻夹设为塑料材质,减少对骨钻造成损伤的情况,通过在夹紧装置上设置串行总线舵机,利用串行总线舵机对骨钻夹进行角度调节处理,通过在操作台上安装两个透明水罐,将一个透明水罐与储水罐连接,另一个与储酶洗液罐连接,当骨钻需要自动化清洗时,将骨钻安装在骨钻夹上,启动伺服电机,带动骨钻夹进行上下移动,配合串行总线舵机调整角度,使骨钻浸泡在酶洗液和水中,可对骨钻进行清洗处理,实现了骨钻清洗机进行全自动化操作,同时具有酶洗和水洗效果,则每次清洗过程中自动更换清洗液,避免交叉污染的情况,解决了医护人员劳动强度,提高了效率及清洗的质量。
附图说明
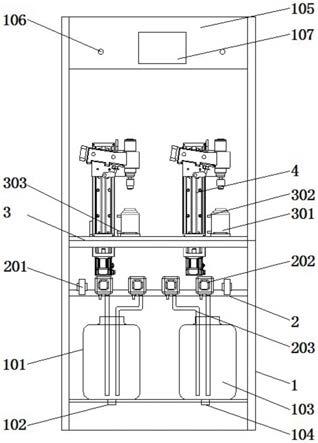
16.图1为本发明提供的正视剖面图;
17.图2为本发明提供的正视图;
18.图3为本发明提供的清洗机构正视图;
19.图4为本发明提供的整体立体图。
20.图中:1、清洗机本体;101、储水罐;102、水位监测传感器a;103、储酶洗液罐;104、水位监测传感器b;105、控制电气箱;106、启动按钮;107、触摸显示屏;2、安装架;201、电磁截止阀;202、电机水泵组;203、水管;3、操作台;301、透明水罐;302、进水口;303、出水口;4、清洗机构;401、模组滑台;402、伺服电机;403、夹紧装置;404、骨钻夹;405、串行总线舵机。
具体实施方式
21.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
22.本发明提供如下技术方案:一种全自动骨钻清洗机,在使用的过程中可以有效的对骨钻进行全自动化清洗操作,增加了清洗机构4,请参阅图1
‑
4,包括清洗机本体1,清洗机本体1的底端一侧安装有储水罐101,清洗机本体1的底端另一侧安装有储酶洗液罐103,清洗机本体1的内部顶端安装有控制电气箱105,清洗机本体1的内部后端下方安装有安装架2,清洗机本体1的内部中心位置安装有操作台3,操作台3的顶部两侧均安装有清洗机构4;
23.进一步的,储水罐101的底部中心位置安装有水位监测传感器a102,储酶洗液罐103的底部中心位置安装有水位监测传感器b104,控制电气箱105的前端面两侧均安装有启动按钮106,控制电气箱105的前端面中心位置安装有触摸显示屏107,水位监测传感器a102和水位监测传感器b104型号均设为sw
‑
wl
‑
t201,具体的,将清洗机本体1的内部底端设置储水罐101和储酶洗液罐103,并将储水罐101和储酶洗液罐103的底部安装水位监测传感器a102和水位监测传感器b104,使水位监测传感器a102和水位监测传感器b104对储水罐101
和储酶洗液罐103进行水位监测处理;
24.进一步的,安装架2的前端面两侧均安装有电磁截止阀201,安装架2的前端面中心位置均安装有电机水泵组202,电机水泵组202上的进水端安装有水管203,具体的,将电机水泵组202上的进水端安装水管203,并将水管203安置在储水罐101和储酶洗液罐103内,由电机水泵组202进行抽离操作,通过在安装架2的前端两侧安装电磁截止阀201,使电磁截止阀201对电机水泵组202进行控制操作处理,实现了储水罐101和储酶洗液罐103内的水资源及酶洗液进行抽取操作;
25.进一步的,操作台3的顶部两侧均安装有透明水罐301,透明水罐301的一侧外壁上方安装有进水口302,透明水罐301的一侧外壁下方安装有出水口303,将透明水罐301设置进水口302,使进水口302接入管道,可对透明水罐301进行注液处理,设置出水口303,可对透明水罐301进行排液处理;
26.进一步的,清洗机构4包括模组滑台401,模组滑台401的一端贯穿操作台3与伺服电机402的一端固定连接,伺服电机402上的输出轴与模组滑台401内的转轴转动连接,模组滑台401的前端面上方安装有夹紧装置403,夹紧装置403的前端面上方安装有骨钻夹404,夹紧装置403的前端面下方安装有串行总线舵机405,具体的,将伺服电机402上的输出轴与模组滑台401内的转轴转动连接,启动伺服电机402,带动模组滑台401上的转轴进行正转或反转,通过在模组滑台401上安装夹紧装置403,并将夹紧装置403的后端与转轴上的外螺纹螺纹连接,使转轴正转或反转,带动夹紧装置403进行上下移动,通过将夹紧装置403的前端安装骨钻夹404,使骨钻安装在骨钻夹404上,进行清洗前安装与固定,通过将骨钻夹404设为塑料材质,减少对骨钻造成损伤的情况,通过在夹紧装置403上设置串行总线舵机405,利用串行总线舵机405对骨钻夹404进行角度调节处理,通过在操作台3上安装两个透明水罐301,将一个透明水罐301与储水罐101连接,另一个与储酶洗液罐103连接,当骨钻需要自动化清洗时,将骨钻安装在骨钻夹404上,启动伺服电机402,带动骨钻夹404进行上下移动,配合串行总线舵机405调整角度,使骨钻浸泡在酶洗液和水中,可对骨钻进行清洗处理,实现了骨钻清洗机进行全自动化操作。
27.工作原理:在使用本发明时,将清洗机本体1的内部底端设置储水罐101和储酶洗液罐103,并将储水罐101和储酶洗液罐103的底部安装水位监测传感器a102和水位监测传感器b104,使水位监测传感器a102和水位监测传感器b104对储水罐101和储酶洗液罐103进行水位监测处理,通过在清洗机本体1上的安装架2安装电机水泵组202,将电机水泵组202上的进水端安装水管203,并将水管203安置在储水罐101和储酶洗液罐103内,由电机水泵组202进行抽离操作,通过在安装架2的前端两侧安装电磁截止阀201,使电磁截止阀201对电机水泵组202进行控制操作处理,实现了储水罐101和储酶洗液罐103内的水资源及酶洗液进行抽取操作,将清洗机构4上的模组滑台401安装在操作台3上,并将伺服电机402上的输出轴与模组滑台401内的转轴转动连接,启动伺服电机402,带动模组滑台401上的转轴进行正转或反转,通过在模组滑台401上安装夹紧装置403,并将夹紧装置403的后端与转轴上的外螺纹螺纹连接,使转轴正转或反转,带动夹紧装置403进行上下移动,通过将夹紧装置403的前端安装骨钻夹404,使骨钻安装在骨钻夹404上,进行清洗前安装与固定,通过将骨钻夹404设为塑料材质,减少对骨钻造成损伤的情况,通过在夹紧装置403上设置串行总线舵机405,利用串行总线舵机405对骨钻夹404进行角度调节处理,通过在操作台3上安装两
个透明水罐301,将一个透明水罐301与储水罐101连接,另一个与储酶洗液罐103连接,当骨钻需要自动化清洗时,将骨钻安装在骨钻夹404上,启动伺服电机402,带动骨钻夹404进行上下移动,配合串行总线舵机405调整角度,使骨钻浸泡在酶洗液和水中,可对骨钻进行清洗处理,实现了骨钻清洗机进行全自动化操作,同时具有酶洗和水洗效果,则每次清洗过程中自动更换清洗液,避免交叉污染的情况,解决了医护人员劳动强度,提高了效率及清洗的质量。
28.虽然在上文中已经参考实施例对本发明进行了描述,然而在不脱离本发明的范围的情况下,可以对其进行各种改进并且可以用等效物替换其中的部件。尤其是,只要不存在结构冲突,本发明所披露的实施例中的各项特征均可通过任意方式相互结合起来使用,在本说明书中未对这些组合的情况进行穷举性的描述仅仅是出于省略篇幅和节约资源的考虑。因此,本发明并不局限于文中公开的特定实施例,而是包括落入权利要求的范围内的所有技术方案。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1