基于雷达的心率分析方法及设备与流程
1.本发明涉及计算机领域,具体涉及了一种基于雷达的心率分析方法及设备。
背景技术:
2.毫米波(mmwave)是一类使用短波长电磁波的特殊雷达技术,毫米波雷达可发射波长为毫米量级的信号。在电磁频谱中,这种波长被视为短波长,也是该技术的优势之一。诚然,处理毫米波信号所需的系统组件(如天线)的尺寸确实很小。短波长的另一项优势是高准确度。工作频率为76
–
81ghz(对应波长约为4mm)的毫米波系统将能够检测小至零点几毫米的移动。
3.人体的呼吸、心跳宏观上看是一种机械运动,呼吸运动是依靠膈肌和肋间肌的收缩和舒张而产生的周期运动,腹部会有1到12mm起伏变化背部会有0.1到0.5mm的起伏变化。心跳是依靠心肌的收缩和舒张产生的周期运动,心脏周围的胸部会有0.1到0.5mm的起伏变化,心脏周围的背部会有0.01到0.2mm的起伏变化。显然毫米波雷达是可以监测到这些微小的变化。
4.目前毫米波雷达监测呼吸心率的应用有监测睡眠中的呼吸心率、监测驾驶员的呼吸心率等。毫米波雷达监测呼吸心率存在四个难点:
5.(1)灵敏度不够,毫米波雷达能检测到零点几毫米的移动而心跳产生的移动在0.1到0.5mm(胸部)、0.01到0.2mm(背部);
6.(2)干扰多、干扰强,对于呼吸心率的检测来说人体的躯干四肢的移动都是强干扰,说话眨眼睛也是强干扰,还有肠道的蠕动,肌肉的抖动等;
7.(3)非接触测量有缺点,非接触测量本来是毫米波雷达的优势但非接触测量本身有缺点,雷达波从发射天线发出经过一段空间到达被测物体后反射再经过一段空间到达接收天线,整个传播过程引入各种干扰,还有反射率、反射面积等影响;
8.(4)软硬件技术还不成熟。
技术实现要素:
9.本发明的目的在于至少解决现有技术中存在的技术问题之一,提供了基于雷达的心率分析方法及设备,解决了现有技术的不足。
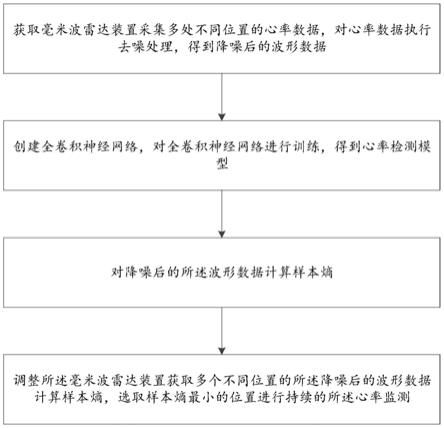
10.本发明的技术方案包括一种基于雷达的心率分析方法,其特征在于,该方法包括以下流程:获取毫米波雷达装置采集多处不同位置的心率数据,对所述心率数据执行去噪处理,得到降噪后的波形数据;创建全卷积神经网络,对所述全卷积神经网络进行训练,得到心率检测模型;对降噪后的所述波形数据计算样本熵;调整所述毫米波雷达装置获取多个不同位置的所述降噪后的波形数据计算样本熵,选取样本熵最小的位置进行持续的所述心率监测。
11.根据所述的基于雷达的心率分析方法,其中获取毫米波雷达装置采集多处不同位置的心率数据,对所述心率数据执行去噪处理,得到降噪后的波形数据包括:通过步进电机
带动所述毫米波雷达装置进行水平垂直旋转,调整所述毫米波雷达装置所发射的雷达波的位置;对采集的所述心率数据执行小波去噪,得到所述心率数据的时序波形数据。
12.根据所述的基于雷达的心率分析方法,其中对采集的所述心率数据执行小波去噪,得到所述心率数据的时序波形数据包括:调用函数库获取前方物体的速度,接着对物体的速度进行采样,采样率50hz,得到一维时序波形数据s,s的长度512;选择db5小波,分解层数为5,对一维时序波形数据s进行小波分解,获得近似系数ca5和细节系数cd1、cd2、cd3、cd4、cd5,其中cd1的带宽为12.5hz-25hz,cd2的带宽为6.25hz-12.5hz,cd3的带宽为3.12hz-6.25hz,cd4的带宽为1.56hz-3.12hz,cd5的带宽为0.78hz-1.56hz,ca5的带宽为0hz-0.78hz;将近似系数ca5和细节系数cd1、cd2置零,细节系数cd3乘以k,其中k是一个可调参数,小波重构近似系数ca5和细节系数cd1、cd2、cd3、cd4、cd5得到降噪后的所述时序波形数据。
13.根据所述的基于雷达的心率分析方法,其中创建全卷积神经网络,对所述全卷积神经网络进行训练,得到心率检测模型包括:通过迁移学习方式,使用生理信号训练全卷积神经网络,使得所述全卷积神经网络达到符合要求的精度;冻结所述全卷积神经网络的所有卷积层,通过输入经过降噪后的所述波形数据训练全卷积神经网络,使得所述全卷积神经网络达到符合要求的精度;所述全卷积神经网络输入为经过降噪后的所述波形数据并且对所述波形数据做了均值为零方差为1的归一化处理;所述全卷积神经网络输出心率的27个分类类别,其中分类类别是45次/分钟至180次/分钟的心率范围分为27个类别的组成,且以5次为间隔。
14.根据所述的基于雷达的心率分析方法,其中全卷积神经网络依次包括卷积层、批量归一化层、非线性激活层、卷积层、批量归一化层、非线性激活层、卷积层、批量归一化层、非线性激活层、一个全局平均池化层、一个全连接层及一个sigmoid层。
15.根据所述的基于雷达的心率分析方法,其中降噪后的所述波形数据计算样本熵包括:连续采样降噪后的时序波形数据,采样率为50hz,采样长度1280个点,构成时间序列s1,将序列s1拆分成等长的十个子序列,每个子序列长度128个点;对每个子序列分别加窗做傅里叶变换获得幅频特性mag1、mag2、mag3、mag4、mag5、mag6、mag7、mag8、mag9、mag10,其中的窗函数为kaiser窗函数,旁瓣参数β设为k,其中k是一个可调参数;计算相邻幅频特性之间的皮尔逊相关系数获得coeff1、coeff2、coeff3、coeff4、coeff5、coeff6、coeff7、coeff8、coeff9,进一步对九个相关系数求和后做数学平均,再计算平均数的倒数得到时序波形数据的样本熵。
16.根据所述的基于雷达的心率分析方法,其中调整所述毫米波雷达装置获取多个不同位置的所述降噪后的波形数据计算样本熵,选取样本熵最小的位置进行持续的所述心率监测包括:通过样本熵搜索最佳心率测量位置,通过两个步进电机水平垂直旋转生成多个心率测量位置,每个测量位置采样降噪后的所述波形数据计算样本熵,所得的样本熵从小到大排序,当最小样本熵小于某个阈值,说明找到了最佳的位置,即样本熵最小的位置,停留在此位置持续的监测心率,当此位置的样本熵超过某个阈值开始下一次搜索。
17.本发明的技术方案还包括一种基于雷达的心率设备,包括毫米波雷达接收发射装置、处理器、供电装置及电机驱动装置;所述毫米波雷达接收发射装置包括毫米波雷达接收发射芯片及约束天线,所述约束天线用于约束所述毫米雷达接收发射芯片所发射的雷达波
的集束大小;所述供电装置用于为所述毫米波雷达接收发射芯片及所述处理器供电;所述处理器连接所述电机驱动装置;所述电机驱动装置用于驱动两个电机带动所述毫米波雷达接收发射装置进行水平垂直旋转,调整所述毫米波雷达接收发射装置所发射的雷达波的位置;所述处理器用于执行权利要求1-7任一项的所述基于雷达的心率分析方法。
18.根据所述的基于雷达的心率分析设备,其中所发射的雷达波的集束大小通过调整所述约束天线的型号实现。
19.根据所述的基于雷达的心率分析设备,其中约束天线包括喇叭天线或透镜。
20.本发明的有益效果为:硬件上使用毫米波雷达集成芯片,高度集成的好处在于简化电路设计、一致性好、抗干扰强等;外加透镜或喇叭天线,作用有两个其一增强信号其二增强毫米波雷达的方向性;增加两个步进电机用于驱动安装雷达芯片的电路板在水平垂直方向上旋转寻找最优的心率测量位置;利用小波去噪,相比与传统的去噪方法,小波去噪不仅能去除噪声,而且最大限度的保留有用信号;算时序波形数据的样本熵,通过样本熵调节步进电机驱动安装雷达芯片的电路板在水平垂直方向上旋转寻找最佳的心率测量位置;使用全卷积神经网络构建端到端的心率计算方法,针对训练数据不足的问题,本发明还提出了一种迁移学习。通过这些综合的改进使得毫米波雷达监测心率的设备实用性得到了极大的提高。
附图说明
21.下面结合附图和实施例对本发明进一步地说明;
22.图1所示为根据本发明实施方式的心率分析流程图。
23.图2所示为根据本发明实施方式的装置示意图。
24.图3所示为根据本发明实施方式的喇叭天线示意图。
25.图4所示为根据本发明实施方式的是否安装喇叭天线的对比图。
26.图5所示为根据本发明实施方式的喇叭天线的工作原理图。
27.图6所示为根据本发明实施方式的电机工作原理图。
28.图7所示为根据本发明实施方式的全卷积神经网络结构示意图。
29.图8所示为根据本发明实施方式的心跳波形示意图。
具体实施方式
30.本部分将详细描述本发明的具体实施例,本发明之较佳实施例在附图中示出,附图的作用在于用图形补充说明书文字部分的描述,使人能够直观地、形象地理解本发明的每个技术特征和整体技术方案,但其不能理解为对本发明保护范围的限制。
31.在本发明的描述中,若干的含义是一个或者多个,多个的含义是两个以上,大于、小于、超过等理解为不包括本数,以上、以下、以内等理解为包括本数。
32.在本发明的描述中,对方法步骤的连续标号是为了方便审查和理解,结合本发明的整体技术方案以及各个步骤之间的逻辑关系,调整步骤之间的实施顺序并不会影响本发明技术方案所达到的技术效果。
33.本发明的描述中,除非另有明确的限定,设置等词语应做广义理解,所属技术领域技术人员可以结合技术方案的具体内容合理确定上述词语在本发明中的具体含义。
34.图1所示为根据本发明实施方式的心率分析流程图。该流程包括:获取毫米波雷达装置采集多处不同位置的心率数据,对心率数据执行去噪处理,得到降噪后的波形数据;创建全卷积神经网络,对全卷积神经网络进行训练,得到心率检测模型;对降噪后的所述波形数据计算样本熵;调整所述毫米波雷达装置获取多个不同位置的所述降噪后的波形数据计算样本熵,选取样本熵最小的位置进行持续的所述心率监测。
35.在一个实施方式中,小波去噪包括:比与传统的去噪方法,小波去噪不仅能去除噪声,而且最大限度的保留有用信号。具体如下:调用毫米波雷达芯片库提供的服务获取前方物体的速度,接着对速度进行采样,采样率50hz,得到一维时序波形数据s,s的长度512。选择db5小波,分解层数为5,对一维时序波形数据s进行小波分解,获得近似系数ca5和细节系数cd1、cd2、cd3、cd4、cd5,cd1的带宽12.5hz-25hz,cd2的带宽6.25hz-12.5hz,cd3的带宽3.12hz-6.25hz,cd4的带宽1.56hz-3.12hz,cd5的带宽0.78hz-1.56hz,ca5的带宽0hz-0.78hz。近似系数ca5和细节系数cd1、cd2置零,细节系数cd3乘以k,其中k是一个可调参数,小波重构近似系数ca5和细节系数cd1、cd2、cd3、cd4、cd5获得降噪后的时序波形数据。
36.一种matlab代码如下:
37.[c,l]=wavedec(s,5,'db5');%小波分解
[0038]
c(1:24)=0;
[0039]
c(160:553)=0;
[0040]
k=0.5;
[0041]
c(89:159)=c(89:159)*k;
[0042]
y=waverec(c,l,'db5')。%小波重构
[0043]
在一个实施方式中,计算样本熵包括:连续采样降噪后的时序波形数据,采样率为50hz,采样长度1280个点,构成时间序列s1,将序列s1拆分成等长的十个子序列,每个子序列长度128个点,每个子序列分别加窗做傅里叶变换获得幅频特性mag1、mag2、mag3、mag4、mag5、mag6、mag7、mag8、mag9、mag10,其中的窗函数为kaiser窗函数,旁瓣参数β设为k,k是一个可调参数,计算相邻幅频特性之间的皮尔逊相关系数获得coeff1、coeff2、coeff3、coeff4、coeff5、coeff6、coeff7、coeff8、coeff9,进一步对九个相关系数求和后做数学平均,再计算平均数的倒数得到时序波形数据的样本熵。
[0044]
图2所示为根据本发明实施方式的装置示意图。如图2,硬件上使用毫米波雷达集成芯片(也集成了收发天线),使得整个电路的设计简化,毫米波雷达芯片是60ghz脉冲相干雷达传感器,这是一颗集成了毫米波雷达所用到的所有电路包括收发天线,除了毫米波雷达芯片本身还提供了运行在运算处理器上的库,这个库以服务的形式提供,开发者直接调用服务就可以获取雷达前方物体的距离,速度等信息。电机驱动电路是两个步进电机的驱动电路。运算处理器是雷达芯片库运行的平台也是后面所有算法运行的平台。
[0045]
图3所示为根据本发明实施方式的喇叭天线示意图。如图3,毫米波雷达芯片接收到的回波能量有发射功率、反射率、反射面积等多种因素影响,喇叭天线是一种优化这些因素的方法,图3描述了毫米波雷达芯片与喇叭天线在电路板上的位置关系,喇叭天线有两方面的作用:
[0046]
1、增强信号,图4是毫米波雷达监测2.1米处的物体的距离,显然加上喇叭天线提高了接收到的能量信噪比也提高了20倍。
[0047]
2、增强了毫米波的方向性,毫米波雷达本身有比较强的方向性,通过喇叭天线进一步增强这种方向性,图5加上喇叭天线之后毫米波能探测到的范围变窄说明更有指向性,对于心率检测来说,最好的位置在心脏周围的胸部,是一个比较小的区域,如果毫米波雷达能精准指向这个区域可以很好的提高信噪比。
[0048]
图6所示为根据本发明实施方式的电机工作原理图。如图6,本实施例通过整2个电机的位置,通过样本熵搜索最佳心率测量位置,两个步进电机水平垂直旋转生成n个心率测量位置,每个测量位置采样1280个点计算该位置的样本熵,所得的这些样本熵从小到大排序,当最小样本熵小于某个阈值,说明找到了最佳的位置,即样本熵最小的位置,停留在此位置持续的监测心率,当此位置的样本熵超过某个阈值开始下一次搜索。
[0049]
图7所示为根据本发明实施方式的全卷积神经网络的结构示意图。设计全卷积神经网络如图7所示,这是1d的卷积神经网络,输入是降噪后的波形数据采样率为50hz长度为10秒钟,输入数据也做了均值为零方差为1的归一化处理。输出为27个类别,心率的计算本来是回归的问题,这里看成分类问题优点在于数据便于标注,因为人的心率每时每刻都有变化,10秒钟包含的心率值不可能是个固定的值。27个类别分别是45次到50次每分钟为一类,50次到55次每分钟为第二类,以此类推,最后一类为175次到180次每分钟,心率的输出范围是45次到180次每分钟。这个网络架构依次是卷积层、批量归一化层、非线性激活层、卷积层、批量归一化层、非线性激活层、卷积层、批量归一化层、非线性激活层、、一个全局平均池化层、一个全连接层、一个sigmoid层。本发明提供的迁移学习方法具体如下:首先在生理信号(ecg、ppg、abp等)上训练全卷积神经网络达到一个好的精度;冻结全部卷积层,在本发明设计的毫米波雷达采集到的数据上训练全连接层达到一个好的精度。
[0050]
本发明提供了如下的实施方式,包括:
[0051]
全卷积神经网络的设计,使用深度学习框架tensorflow,代码如下:
[0052]
input_layer=keras.layers.input(input_shape)
[0053]
//卷积层
[0054]
conv1=keras.layers.conv1d(filters=128,kernel_size=8,padding='same')(input_layer)
[0055]
//批量归一化层
[0056]
conv1=keras.layers.batchnormalization()(conv1)
[0057]
//非线性激活层
[0058]
conv1=keras.layers.activation(activation='relu')(conv1)
[0059]
conv2=keras.layers.conv1d(filters=256,kernel_size=5,padding='same')(conv1)
[0060]
conv2=keras.layers.batchnormalization()(conv2)
[0061]
conv2=keras.layers.activation('relu')(conv2)
[0062]
conv3=keras.layers.conv1d(128,kernel_size=3,padding='same')(conv2)
[0063]
conv3=keras.layers.batchnormalization()(conv3)
[0064]
conv3=keras.layers.activation('relu')(conv3)
[0065]
//全局平均池化层
[0066]
gap_layer=keras.layers.globalaveragepooling1d()(conv3)
[0067]
//全连接层
[0068]
output_layer=keras.layers.dense(nb_classes,activation='softmax')(gap_layer)model=keras.models.model(inputs=input_layer,outputs=output_layer)
[0069]
//损失函数优化器设置
[0070]
model.compile(loss='categorical_crossentropy',optimizer=keras.optimizers.adam(),
[0071]
metrics=['accuracy'])
[0072]
全卷积神经网络的训练,本发明设计的卷积神经网络是将原始波形数据作为输入心率作为输出的端到端的学习算法,收集的训练数据为(train_x,train_y),其中train_x是采样率为50hz,长度为10秒的原始波形数据,train_y波形对应心率值,心率的计算本来是回归的问题,这里看成分类问题优点在于数据便于标注,因为人的心率每时每刻都有变化,10秒钟包含的心率值不可能是个固定的值。27个类别分别是45次到50次每分钟为一类,50次到55次每分钟为第二类,以此类推,最后一类为175次到180次每分钟,心率的输出范围是45次到180次每分钟。收集数据时需要一台血氧仪以及本发明设计的硬件同步记录,本发明的硬件记录原始波形数据,血氧仪记录心率值。收集的数据要覆盖45次到180次每分钟的心率范围最好包含不同的年龄性别不同的体质增加数据的多样性。训练深度神经网络需要大量的标注数据,收集标注数据费时费力,迁移学习(transfer learning)是一种机器学习方法,是把一个领域(即源领域)的知识,迁移到另外一个领域(即目标领域),使得目标领域能够取得更好的学习效果。通常源领域数据量充足,而目标领域数据量较小,这种场景就很适合做迁移学习,本发明提出的迁移学习的源领域为生理信号(ecg、ppg、abp等),目标领域为毫米波雷达监测到的人体心动周期波,生理信号(ecg、ppg、abp等)有大量的公开数据集可以免费获取,具体的迁移过程是首先在生理信号(ecg、ppg、abp等)上训练全卷积神经网络,冻结全部卷积层,在本发明设计的毫米波雷达采集到的数据上训练全连接层。
[0073]
图8所示为根据本发明实施方式的心跳波形示意图。本实施例通过样本熵计算,根据毫米波指向的位置靠近心脏的不同程度,获得的心跳波形大体分为三类图8所示,波形1离心脏最近,特点是心跳周期波形清晰信噪比高,波形2离心脏稍远,特点是心跳周期波形比较明显信噪比稍大,波形3远离心脏,特点是心跳周期波形被噪声淹没信噪比低。样本熵是表达时序数据的混乱程度,样本熵的值越低,序列自我相似性就越高,样本熵的值越大,新模式产生的概率越大,序列的复杂性就越大。毫米波指向的位置离心脏越近样本熵越小,越远样本熵越大。在毫米波雷达检测心率的系统中样本熵与信噪比成反比关系。搜索最佳的心率测量位置就是寻找信噪比最高的位置也是样本熵最低的位置。样本熵的计算是通过比较相邻波形之间的相似度,在时域里面比较的话存在相位对齐的问题,将时域中的数据变换到频域里面就可以直接比较简化了运算。
[0074]
应当认识到,本发明实施例中的方法步骤可以由计算机硬件、硬件和软件的组合、或者通过存储在非暂时性计算机可读存储器中的计算机指令来实现或实施。所述方法可以使用标准编程技术。每个程序可以以高级过程或面向对象的编程语言来实现以与计算机系统通信。然而,若需要,该程序可以以汇编或机器语言实现。在任何情况下,该语言可以是编译或解释的语言。此外,为此目的该程序能够在编程的专用集成电路上运行。
[0075]
此外,可按任何合适的顺序来执行本文描述的过程的操作,除非本文另外指示或以其他方式明显地与上下文矛盾。本文描述的过程(或变型和/或其组合)可在配置有可执行指令的一个或多个计算机系统的控制下执行,并且可作为共同地在一个或多个处理器上执行的代码(例如,可执行指令、一个或多个计算机程序或一个或多个应用)、由硬件或其组合来实现。所述计算机程序包括可由一个或多个处理器执行的多个指令。
[0076]
进一步,所述方法可以在可操作地连接至合适的任何类型的计算平台中实现,包括但不限于个人电脑、迷你计算机、主框架、工作站、网络或分布式计算环境、单独的或集成的计算机平台、或者与带电粒子工具或其它成像装置通信等等。本发明的各方面可以以存储在非暂时性存储介质或设备上的机器可读代码来实现,无论是可移动的还是集成至计算平台,如硬盘、光学读取和/或写入存储介质、ram、rom等,使得其可由可编程计算机读取,当存储介质或设备由计算机读取时可用于配置和操作计算机以执行在此所描述的过程。此外,机器可读代码,或其部分可以通过有线或无线网络传输。当此类媒体包括结合微处理器或其他数据处理器实现上文所述步骤的指令或程序时,本文所述的发明包括这些和其他不同类型的非暂时性计算机可读存储介质。当根据本发明所述的方法和技术编程时,本发明还包括计算机本身。
[0077]
计算机程序能够应用于输入数据以执行本文所述的功能,从而转换输入数据以生成存储至非易失性存储器的输出数据。输出信息还可以应用于一个或多个输出设备如消费者。在本发明优选的实施例中,转换的数据表示物理和有形的对象,包括消费者上产生的物理和有形对象的特定视觉描绘。
[0078]
上面结合附图对本发明实施例作了详细说明,但是本发明不限于上述实施例,在技术领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下做出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1