力线监测系统及方法与流程
1.本发明属于医疗设备领域,具体涉及一种力线监测系统及方法。
背景技术:
2.目前的膝关节周围截骨术需要术中在病人仰卧、下肢旋转中立位体位下行x线透视,定位股骨头中心、膝关节中心及踝关节中心。以确定股骨头中心
‑
踝关节中心连线(及下肢冠状面机械力线)与膝关节中心的关系。根据患者个体情况需在术中调整该关系,恢复最佳力线。
3.单次x线透视只能观察当时的解剖结构位置,不能实时监测,需多次反复透视。术中需反复多次进行x线透视,不仅引起病人和医务人员辐射暴露,还增加术中污染风险及延长手术时间,提高并发症风险。目前尚无其他手段替代术中x线透视确定股骨头中心、膝关节中心及踝关节中心。
技术实现要素:
4.本发明要解决的技术问题是现有技术中力线监测需反复多次进行x线透视,操作不便,且易对患者和医务人员造成辐射危害。
5.为解决上述技术问题,本发明提供一种力线监测系统,所述系统包括信号发射器、信号接收器和显示器;所述信号发射器固定在关节表面皮肤处并用于发射信号,所述信号接收器设置在可仰卧位平躺的体位垫内;
6.所述信号接收器连接电源,用于采集所述信号发射器发出的信号,并定位所述信号的发射位置在所述体位垫上的正投影位置的二维坐标;
7.所述信号接收器与所述显示器通过无线或有线连接,所述显示器用于接收并可视化显示所述信号接收器的定位信息。
8.进一步地,所述关节包括股骨头、踝关节和膝关节。
9.进一步地,所述信号发射器包括磁信号发射器或红外信号发射器。磁信号发射器、红外信号发射器、磁感应器和红外感应器可直接使用市售产品,成本低且操作简单。
10.进一步地,所述信号发射器设置在载体上,所述载体设有用于固定到关节的固定部;
11.进一步地,所述载体包括贴片载体和定位针载体,所述定位针载体用电钻钻入骨质固定在关节处。贴片载体可直接通过粘力粘贴到关节表面上,可使位于贴片载体内的信号发射器与关节皮肤紧密贴合;定位针载体用于膝关节处时,能消除皮肤等软组织引起的误差,并且紧贴膝关节两侧骨面,使膝关节胫骨和股骨内、外侧点定位更精确,可使信号发射器与膝关节准确接触,使获得的定位信息更加准确。
12.更进一步地,所述定位针载体和红外信号发射器用于膝关节处。膝关节处使用红外信号发射器能够避免两个磁体在间距较小的情况下存在磁场干扰,提高定位信息的准确性。
13.所述信号接收器包括依次电连接的:
14.信息采集模块,用于过滤、采集所述信号;
15.在所述体位垫上的二维坐标已知的距离感应模块,用于感应所述信号发射位置与所述距离感应模块的距离;
16.计算模块,根据所述距离感应模块的坐标和所述距离计算所述信号发射位置在所述体位垫上的正投影位置的二维坐标;
17.以及信息传输模块,用于将所述信号发射位置在所述体位垫上的正投影位置的二维坐标传输至所述显示器;
18.进一步地,所述距离感应模块包括磁感应器或/和红外感应器。
19.所述距离感应模块在所述体位垫上的连线呈直角三角形。
20.所述体位垫设置为刚性或柔性,设置为柔性时需配合刚性底部支撑使用。柔性体位垫的设计可使该垫像瑜伽垫那样卷起,利于收纳。
21.所述显示器包括处理器模块,所述处理器模块用于将接收的所述信号发射位置在所述体位垫上的正投影位置的二维坐标转化为可视化图像信息。显示器可直接计算并显示股骨头
‑
踝关节中心连线和膝关节内、外侧连线交叉点位于膝关节内、外侧连线的具体位置。
22.为解决上述技术问题,本发明还提供一种力线监测方法,所述方法包括以下步骤:
23.1)固定在关节表面皮肤处的信号发射器发射信号;
24.2)设置在可仰卧位平躺的体位垫内的信号接收器采集所述信号发射器发出的信号,定位所述信号的发射位置在所述体位垫上的正投影位置的二维坐标,并将定位信息传输给显示器;
25.3)所述显示器接收并可视化显示出所述定位信息;
26.4)通过显示器上显示的定位信息监测力线关系。
27.进一步地,所述关节包括股骨头、踝关节和膝关节等。
28.信号发射器在体位垫上的正投影位置的二维坐标就是关节在体位垫上的正投影位置的二维坐标,采用上述方法可间接的计算关节位置在体位垫上的二维坐标,最后将关节正投影的二维坐标信息传输至显示器,医生可直观在显示器的屏幕上观察患者的关节力线信息,操作方便,并且避免了x射线的使用。
29.步骤1)中所述信号发射器包括磁信号发射器或红外信号发射器。
30.进一步地,所述信号发射器设置在载体上,所述载体设有用于固定到关节的固定部。
31.进一步地,所述载体包括贴片载体和定位针载体,所述定位针载体用电钻钻入骨质固定在关节处。
32.更进一步地,所述定位针载体和红外信号发射器用在膝关节处。
33.所述信号接收器包括依次电连接的:信息采集模块、距离感应模块、计算模块和信息传输模块;
34.所述步骤2)包括:
35.a.接通电源,所述信息采集模块过滤、采集所述信号;
36.b.所述距离感应模块感应所述信号发射位置与所述距离感应模块的距离;
37.c.所述计算模块根据所述距离感应模块的坐标和所述距离计算所述信号发射位置在所述体位垫上的正投影位置的二维坐标;
38.d.所述信息传输模块将所述信号发射位置在所述体位垫上的正投影位置的二维坐标通过有线或无线方式传输至显示器。
39.进一步地,所述距离感应模块包括磁感应器或/和红外感应器。
40.所述距离感应模块在所述体位垫上的连线呈直角三角形。
41.所述体位垫设置为刚性或柔性,所述体位垫为柔性时配合刚性底部支撑使用。
42.所述显示器包括处理器模块,所述步骤3)为:所述处理器模块将接收到的定位信息转化为可视化的图像信息并显示在显示屏上。显示器可直接计算并显示股骨头
‑
踝关节中心连线和膝关节内、外侧连线交叉点位于膝关节内、外侧连线的具体位置,如50%、内侧40%或外侧60%。
43.本发明取得的有益效果是:
44.本发明通过定位关节上信号发射器的信号发射位置在体位垫上的正投影位置的二维坐标间接定位关节力线关系,并且将力线关系直接在显示幕上可视化显示,能够减少甚至避免x线透视的使用;可在手术中使用,实现实时监测,操作方便,有效缩短手术时间、减少手术污染。
附图说明
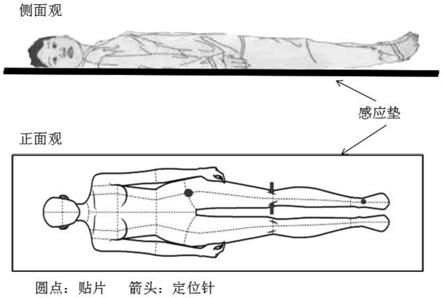
45.图1:人体进行力线监测示意图。
46.图2:力线监测装置模块示意图。
47.图3:在显示器上显示的力线关系示意图,其中,虚线圈内表示股骨头
‑
踝关节中心连线和膝关节内、外侧连线交叉点位于膝关节内、外侧连线的具体位置关系。
48.图4:信号发射位置在体位垫上的正投影位置的二维坐标计算原理图。
具体实施方式
49.以下结合说明书附图和具体实施例对本发明所要求保护的技术方案作进一步清楚的描述。
50.实施例1
51.如图1至图3所示,本发明提供的力线监测系统包括信号发射器、信号接收器和显示器;所述信号发射器固定在关节(例如,股骨头、踝关节和膝关节)表面皮肤处并用于发射信号,具体地,使信号发射器与关节中心在前后投影位置上重合;所述信号接收器设置在可仰卧位平躺的体位垫内;所述信号接收器连接电源,用于采集所述信号发射器发出的信号,并定位所述信号的发射位置在所述体位垫上的正投影位置的二维坐标;所述信号接收器与所述显示器通过无线(例如通过蓝牙或wifi)或有线连接,所述显示器用于接收并可视化显示所述信号接收器的定位信息。
52.具体地,所述信号发射器可使用市售的磁信号发射器(例如可采用市售的钕铁硼磁铁),该磁信号发射器设置在载体上。载体可采用贴片形式(类似心电监护电极片),可将磁信号发射器设置在贴片内,使用时将贴片内磁信号发射器与关节中心在前后位置上重合。当然,也可以用绑带或魔术贴替代贴片,只要能实现将感应器牢靠固定于体表且不容易
松动即可。
53.所述信号接收器包括依次电连接的:
54.信息采集模块,用于过滤、采集所述信号;
55.在所述体位垫上的二维坐标已知的距离感应模块,用于感应所述信号发射位置与所述距离感应模块的距离;
56.计算模块,根据所述距离感应模块的坐标和所述距离计算所述信号发射位置在所述体位垫上的正投影位置的二维坐标;
57.以及信息传输模块,用于将所述信号发射位置在所述体位垫上的正投影位置的二维坐标传输至所述显示器;
58.其中,所述距离感应模块设置为与磁信号发射器相对应的磁感应器(例如霍尼韦尔公司的磁感应器),所述距离感应模块在所述体位垫上的连线呈直角三角形。
59.该过程中,磁信号的发射位置在体位垫上的正投影位置的二维坐标就是关节在体位垫上的正投影位置的二维坐标,采用上述方法可间接的将关节位置通过正投影方式定位到体位垫上,最后利用信息传输模块可将关节正投影的定位信息传输至显示器,医生可直观在显示器的屏幕上观察患者的关节力线信息,操作方便,并且避免了x射线的使用。
60.所述体位垫设置为刚性或柔性(类似于瑜伽垫),设置为柔性时需配合刚性底部支撑使用,须保证该感应垫不会因体重压力而弯曲。所述显示器包括处理器模块,所述处理器模块用于将接收的定位信息转化为可视化图像信息。
61.以手术过程为例,使用该力线监测系统进行力线监测的方法为:
62.(1)在手术床上铺设有信号接收器的体位垫,然后患者仰卧位平躺于体位垫上。保持下肢旋转中立位,经x线前后位透视确定踝关节和股骨头中心,于相应皮肤位置粘贴贴片,使贴片内磁信号发射器与踝关节或股骨头中心在前后位上重合;经x线前后位透视确定胫骨平台内、外侧或股骨髁内、外侧位置,于相应位置皮肤表面粘贴贴片,使内、外侧贴片内磁信号发射器分别与胫骨平台内、外侧或股骨髁内、外侧在前后位上重合;
63.(2)固定在关节处的磁信号发射器发射磁信号;
64.(3)接通电源,所述信息采集模块过滤、采集所述信号;
65.(4)所述距离感应模块感应所述信号发射位置与所述距离感应模块的距离;其中,距离感应模块使用与磁信号发射器相对应的磁感应器;
66.(5)所述计算模块根据所述距离感应模块的坐标和所述距离计算所述信号发射位置在所述体位垫上的正投影位置的二维坐标;
67.(6)所述信息传输模块将所述信号发射位置在所述体位垫上的正投影位置的二维坐标通过有线或无线方式传输至显示器。显示器可直接显示股骨头
‑
踝关节中心连线和膝关节内、外侧连线交叉点位于膝关节内、外侧连线的具体位置。
68.(7)显示器中的处理器模块将接收到的定位信息转化为可视化的图像信息并显示在显示屏上。医生通过显示器上显示定位信息观察、监测并计算力线关系。其中,显示器可直接并显示股骨头
‑
踝关节中心连线和膝关节内、外侧连线交叉点位于膝关节内、外侧连线的具体位置,如50%、内侧40%或外侧60%。
69.其中距离感应模块如图4所示,于体位垫上放置3个距离传感器,连线呈直角三角形放置,设立以该直角三角形直角顶点为原点,两条边分别为x轴和y轴的二维坐标系。位于
直角顶点位置的传感器与另外两个传感器的距离已知,分别为e和d。患者体表固定的信号发射器与该3个传感器的距离可由传感器测量得出,分别为a,b,c。该信号发射器与在体位垫上的正投影位置的二维坐标可结合海仑公式和勾股定理计算得出:
70.设
71.由海伦公式可得:
[0072][0073]
因此,
[0074]
利用上述原理可得出固定于股骨头中心、踝关节中心及膝关节内、外侧皮肤体表的信号发射器在体位垫二维坐标系上的正投影坐标及相对位置。
[0075]
实施例2
[0076]
如图1至图3所示,本发明提供的力线监测系统包括信号发射器、信号接收器和显示器;所述信号发射器固定在关节(例如,股骨头、踝关节和膝关节)表面皮肤处并用于发射信号,具体地,使信号发射器与关节中心在前后投影位置上重合;所述信号接收器设置在可仰卧位平躺的体位垫内;所述信号接收器连接电源,用于采集所述信号发射器发出的信号,并定位所述信号的发射位置在所述体位垫上的正投影位置的二维坐标;所述信号接收器与所述显示器通过无线(例如通过蓝牙或wifi)或有线连接,所述显示器用于接收并可视化显示所述信号接收器的定位信息。
[0077]
具体地,在股骨头、踝关节处,所述信号发射器可使用市售的磁信号发射器(例如可采用市售的钕铁硼磁铁),该磁信号发射器设置在载体上。载体可采用贴片形式(类似心电监护电极片),可将磁信号发射器设置在贴片内,使用时将贴片内磁信号发射器与关节中心在前后位置上重合。当然,也可以用绑带或魔术贴替代贴片,只要能实现将感应器牢靠固定于体表且不容易松动即可。而在膝关节处使用红外信号发射器,将市售的红外信号发射器固定在定位针上,定位针为金属材质,类似克氏针,用电钻钻入胫骨平台内、外侧或股骨髁内、外侧骨质固定。
[0078]
所述信号接收器包括依次电连接的:
[0079]
信息采集模块,用于过滤、采集所述信号;
[0080]
在所述体位垫上的二维坐标已知的距离感应模块,用于感应所述信号发射位置与所述距离感应模块的距离;
[0081]
计算模块,根据所述距离感应模块的坐标和所述距离计算所述信号发射位置在所述体位垫上的正投影位置的二维坐标;
[0082]
以及信息传输模块,用于将所述信号发射位置在所述体位垫上的正投影位置的二维坐标传输至所述显示器;
[0083]
其中,所述距离感应模块设置为分别与磁信号发射器和红外信号发射器相对应的磁感应器(例如霍尼韦尔公司的磁感应器)和红外信号感应器,所述距离感应模块在所述体位垫上的连线呈直角三角形。
[0084]
该过程中,磁信号或红外信号的发射位置在体位垫上的正投影位置的二维坐标就
是关节在体位垫上的正投影位置的二维坐标,采用上述方法可间接的将关节位置通过正投影方式定位到体位垫上,最后利用信息传输模块可将关节正投影的定位信息传输至显示器,医生可直观在显示器的屏幕上观察患者的关节力线信息,操作方便,并且避免了x射线的使用。
[0085]
所述体位垫设置为刚性或柔性(类似于瑜伽垫),设置为柔性时需配合刚性底部支撑使用,须保证该感应垫不会因体重压力而弯曲。所述显示器包括处理器模块,所述处理器模块用于将接收的定位信息转化为可视化图像信息。
[0086]
以手术过程为例,使用该力线监测系统进行力线监测的方法为:
[0087]
(1)在手术床上铺设有信号接收器的体位垫,然后患者仰卧位平躺于体位垫上。保持下肢旋转中立位,经x线前后位透视确定踝关节和股骨头中心,于相应皮肤位置粘贴贴片,使贴片内磁信号发射器与踝关节或股骨头中心在前后位上重合;于膝关节胫骨平台内、外侧或股骨髁内、外侧使用定位针,使内、外侧定位针上的红外信号发射器分别与胫骨平台内、外侧或股骨髁内、外侧在前后位上重合,并将红外发射器的电源连通;
[0088]
(2)固定在关节处的信号发射器发射信号;
[0089]
(3)接通电源,所述信息采集模块过滤、采集所述信号;
[0090]
(4)所述距离感应模块感应所述信号发射位置与所述距离感应模块的距离;其中,距离感应模块使用与磁信号发射器或红外信号发射器相对应的磁感应器或红外信号感应器;
[0091]
(5)所述计算模块根据所述距离感应模块的坐标和所述距离计算所述信号发射位置在所述体位垫上的正投影位置的二维坐标;
[0092]
(6)所述信息传输模块将所述信号发射位置在所述体位垫上的正投影位置的二维坐标通过有线或无线方式传输至显示器。显示器可直接显示股骨头
‑
踝关节中心连线和膝关节内、外侧连线交叉点位于膝关节内、外侧连线的具体位置。
[0093]
(7)显示器中的处理器模块将接收到的定位信息转化为可视化的图像信息并显示在显示屏上。医生通过显示器上显示定位信息观察、监测并计算力线关系。其中,显示器可直接计算并显示股骨头
‑
踝关节中心连线和膝关节内、外侧连线交叉点位于膝关节内、外侧连线的具体位置,如50%、内侧40%或外侧60%。
[0094]
其中距离感应模块如图4所示,于体位垫上放置3个距离传感器,连线呈直角三角形放置,设立以该直角三角形直角顶点为原点,两条边分别为x轴和y轴的二维坐标系。位于直角顶点位置的传感器与另外两个传感器的距离已知,分别为e和d。患者体表固定的信号发射器与该3个传感器的距离可由传感器测量得出,分别为a,b,c。该信号发射器与在体位垫上的正投影位置的二维坐标可结合海仑公式和勾股定理计算得出:
[0095]
设
[0096]
由海伦公式可得:
[0097][0098]
因此,
[0099]
利用上述原理可得出固定于股骨头中心、踝关节中心及膝关节内、外侧皮肤体表的信号发射器在体位垫二维坐标系上的正投影坐标及相对位置。
[0100]
本发明通过定位关节上信号发射器的信号发射位置在体位垫上的正投影位置的二维坐标间接定位关节力线关系,并且将力线关系直接在显示幕上可视化显示,能够减少甚至避免x线透视的使用;可在手术中使用,实现实时监测,操作方便,有效缩短手术时间、减少手术污染。
[0101]
由于该系统结构和操作简单,成套配置后患者也可独立(居家)使用,避免术后多次去医院复查,柔性体位垫的设计可使该垫像瑜伽垫那样卷起,利于收纳。该系统可进一步拓展至除人体力线外其它结构的监测,也可应用于宠物医疗,具有广泛应用。
[0102]
以上所述的实施例仅是对本发明做示例性描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1