一种全自动整骨装置的整骨方法与流程
1.本发明涉及一种整骨设备,更具体地说,它涉及一种全自动整骨装置的整骨方法。
背景技术:
2.现代生活工作压力大,人们生活习惯的改变,脊椎疾病患者越来越多。在一定程度上,人们多是忍耐,坚持病痛工作生活。时间过长,逐渐形成了,颈椎病,腰椎间盘突出等病症。现有的治疗方法:西医基本是手术及药物治疗,效果不错。但手术后期康复周期长。药物副作用大,给患者在经济及身体上带来负担较大。现有中医整骨方法及针灸等不能准确及时的解决患者病痛问题,只能达到长时间的缓解状态。
3.现有的腰椎治疗仪器的治疗方法是:一是单方面的解决患者的腰椎生理曲度问题,通过加热处理局部肌肉及关节柔韧度,再利用平躺负压腰椎使其在一定时间内形成生理曲度,但腰椎间盘突出患者体感,不能恢复正常,没有真正改变腰椎间盘突出的位置使其病灶依然存在。没有达到预期目标。还有一种方法就是牵引床,其工作原理:对腰椎病患者进行机械性拉伸,使椎间隙变大以减少腰椎间盘突出对神经及脊髓挤压达到缓解目的,牵引疗程时间长,效果不明显。因为在牵引过程中利用机械力量拉伸腰椎间隙,力量大了,会造成局部肌肉韧带拉伤,造成次伤害使患者又增加伤痛。如果拉伸力量小,又达不到拉开椎间隙减少挤压神经的缓解效果。在于以上多种治疗方法对腰椎病没达到预期效果。
技术实现要素:
4.针对现有技术存在的不足,本发明的目的在于提供一种全自动整骨装置的整骨方法,能够对人体进行精确检测并且在确定治疗方案后对人体脊椎突出点,施加与脊椎关节垂直方向的冲击力,使其腰椎间盘突出的间盘回纳到原位,从而改变了腰椎间盘突出对神经根的挤压,使人体自然康复。
5.为实现上述目的,本发明提供了如下技术方案:一种全自动整骨装置的整骨方法,包括有步骤s1,扫描人体外轮廓,并获取人体3d人体轮廓数据;
6.s2,扫描人体脊椎轮廓,并获取人体3d脊椎数据;
7.s3,基于人体3d人体轮廓数据和人体3d脊椎数据生成整骨装置的操作方案;
8.s4,基于操作方案确定整骨装置的初始位置、移动行程、移动速度以及作用力度;
9.s5,确定操作方案,并开始运行整骨装置。
10.本发明进一步设置为:所述s1前还包括有准备步骤sa,
11.所述sa包括有,sa1,人趴在床身上;
12.sa2,固定人体位置;
13.sa3,调节床身角度。
14.本发明进一步设置为:所述sa2和sa3之间还包括有步骤sb,对人体进行预拉伸步骤。
15.本发明进一步设置为:所述s1包括有,s11通过移动架带动激光扫描装置依次扫描
人体身体;
16.s12,获取人体外部轮廓数据;
17.s13,将外部轮廓数据传输至操控电脑。
18.本发明进一步设置为:所述s2包括有,s21,驱动传感器与人体背部贴合;
19.s22,通过移动架带动传感器扫描人体脊椎;
20.s23,获取人体脊椎数据;
21.s24,将脊椎数据传输至操控电脑。
22.本发明进一步设置为:所述s3包括有构建具有自学习功能的整骨方案生成算法,将人体参数和整骨方法数据以及对应的整骨设备操作方法输入整骨方案生成算法中得到最终的整骨设备操作方法。
23.本发明进一步设置为:所述s3包括有,s31,接收外部轮廓数据和脊椎数据;
24.s32,根据外部轮廓数据建立外部肌肉结构模型;
25.s33,根据脊椎数据建立内部骨骼结构模型;
26.s34,将外部肌肉结构模型和骨骼结构模型输入至整骨方案生成算法中,生成整骨设备的操作方案。
27.本发明进一步设置为:所述s4具体包括有,s41生成整骨装置的初始位置、移动行程、移动速度以及作用力度;
28.s42,生成确认信息,供操作人员进行确认操作。
29.本发明进一步设置为:所述s4还包括有,s43,通过操控终端对整骨动作和整骨后的效果进行仿真展示,并且供操作人员确认。
30.本发明进一步设置为:所述s5包括有通过机械手施加与脊椎关节垂直方向的冲击力。
31.综上所述,本发明具有以下有益效果:首先通过检测设备扫描人体外部轮廓和内部骨骼轮廓生成对应的外部肌肉结构模型和内部骨骼结构模型,再将外部肌肉结构模型和内部骨骼结构模型输入至操控电脑的处理模型中,自动生成整骨装置的操作方案,并且将操作方案传输至整骨装置中,使得整骨装置根据该操作方案对,对应位置上的人体进行治疗操作,首先将整骨装置的复位头移动至指定的位置上,再设定复位头的移动轨迹、移动速度以及作用于人体身上的力度,通过整骨设备代替医生手工操作,从而大大解放了人力资源。
32.该设备以及该设备的操作方法,不仅能够全自动检测人体自身外轮廓和骨骼状态,而且能够基于检测结果自动分析病理、提出针对性的操作方案,通过对人体患处突出点,施加与脊椎关节垂直方向的冲击力。使其腰椎间盘突出的间盘回纳到原位。从而改变了腰椎间盘突出对神经的挤压。使人体自然康复。
附图说明
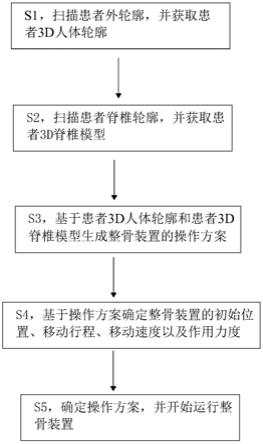
33.图1为全自动整骨装置的整骨方法的步骤示意图。
具体实施方式
34.下面结合附图和实施例,对本发明进一步详细说明。其中相同的零部件用相同的
附图标记表示。需要说明的是,下面描述中使用的词语“前”、“后”、“左”、“右”、“上”和“下”指的是附图中的方向,词语“底面”和“顶面”、“内”和“外”分别指的是朝向或远离特定部件几何中心的方向。
35.参照图1所示,为实现上述目的,本发明提供了如下技术方案:一种全自动整骨装置的整骨方法,包括有步骤s1,扫描人体外轮廓,并获取人体3d人体轮廓数据;
36.s2,扫描人体脊椎轮廓,并获取人体3d脊椎数据;
37.s3,基于人体3d人体轮廓数据和人体3d脊椎数据生成整骨装置的操作方案;
38.s4,基于操作方案确定整骨装置的初始位置、移动行程、移动速度以及作用力度;
39.s5,确定操作方案,并开始运行整骨装置。
40.本发明的设计,首先通过检测设备扫描人体外部轮廓和内部骨骼轮廓生成对应的外部肌肉结构模型和内部骨骼结构模型,再将外部肌肉结构模型和内部骨骼结构模型输入至操控电脑的处理模型中,自动生成整骨装置的操作方案,并且将操作方案传输至整骨装置中,使得整骨装置根据该操作方案对,对应位置上的人体进行治疗操作,首先将整骨装置的复位头移动至指定的位置上,再设定复位头的移动轨迹、移动速度以及作用于人体身上的力度,通过整骨设备代替医生手工操作,从而大大解放了人力资源。
41.该设备以及该设备的操作方法,不仅能够全自动检测人体自身外轮廓和骨骼状态,而且能够基于检测结果自动分析病理、提出针对性的操作方案,通过对人体患处突出点,施加与脊椎关节垂直方向的冲击力。使其腰椎间盘突出的间盘回纳到原位。从而改变了腰椎间盘突出对神经的挤压。使人体自然康复。
42.s1前还包括有准备步骤sa,
43.sa包括有,sa1,人趴在床身上;
44.sa2,固定人体位置;
45.sa3,调节床身角度。
46.sa2和sa3之间还包括有步骤sb,对人体进行预拉伸步骤。
47.该sa和sb的设计,当人体躺在床体上时通过调节装置能够使得人体双脚离地,这样可以使人体腰椎关节自然放松椎间隙自然放大不仅方便前期的检测的准确性而且方便后续进行治疗操作。
48.固定人体身体能够避免在检测过程中发生偏移,影响后续的检测结构,而固定方式可以为捆绑带的形式设计。
49.s1包括有,s11通过移动架带动激光扫描装置依次扫描人体身体;
50.s12,获取人体外部轮廓数据;
51.s13,将外部轮廓数据传输至操控电脑。
52.s2包括有,s21,驱动传感器与人体背部贴合;
53.s22,通过移动架带动传感器扫描人体脊椎;
54.s23,获取人体脊椎数据;
55.s24,将脊椎数据传输至操控电脑。
56.s3包括有构建具有自学习功能的整骨方案生成算法,将人体参数和整骨方法数据以及对应的整骨设备操作方法输入整骨方案生成算法中得到最终的整骨设备操作方法。
57.该具有自学习功能的整骨方案生成算法可以为基于深度学习的卷积神经网络模
型。
58.s3包括有,s31,接收外部轮廓数据和脊椎数据;
59.s32,根据外部轮廓数据建立外部肌肉结构模型;
60.s33,根据脊椎数据建立内部骨骼结构模型;
61.s34,将外部肌肉结构模型和骨骼结构模型输入至整骨方案生成算法中,生成整骨设备的操作方案。
62.s4具体包括有,s41生成整骨装置的初始位置、移动行程、移动速度以及作用力度;
63.s42,生成确认信息,供操作人员进行确认操作。
64.s4还包括有,s43,通过操控终端对整骨动作和整骨后的效果进行仿真展示,并且供操作人员确认。
65.当该有自学习功能的整骨方案生成算法所生成的整骨设备操作方法,供设备操作人员或者医师进行查看,基于扫描的人体数据和脊柱数据,结合被整骨人的实际情况,复核由程序生成的操作方案;如有必要则对操作方案进行调整。
66.生成诊疗方案时间较长,患者身体相对整骨床位置发生了改变(例如患者下床等待诊疗方案),则需要重新定位患者病灶,以确保整骨位置精确,为此进行二次扫描。
67.s5包括有通过机械手施加与脊椎关节垂直方向的冲击力。
68.为实现上述目的,本发明提供了如下设备:一种全自动整骨装置,包括有床体、设置于床体上的人体外部3d轮廓扫描装置、人体3d脊椎扫描装置、自动臂本体以及-操控终端,人体外部3d轮廓扫描装置和人体3d脊椎扫描装置均滑移连接于床体,人体外部3d轮廓扫描装置用于扫描人体外轮廓,并生成外轮廓信息;
69.人体3d脊椎扫描装置用于扫描人体脊椎轮廓,并生成脊椎轮廓信息;
70.操控终端分别与人体外部3d轮廓扫描装置和人体3d脊椎扫描装置通讯连接设置,操控终端用于接收外轮廓信息和脊椎轮廓信息并生成3d轮廓图像和治疗方案;
71.自动臂本体与操控终端通讯连接,自动臂本体用于根据治疗方案进行治疗操作。
72.床体上设置有移动架和驱动移动架移动的驱动装置,人体外部3d轮廓扫描装置和人体3d脊椎扫描装置均设置于移动架上,驱动装置与操控终端通讯连接。
73.驱动装置包括有导轨和驱动电机,导轨埋设于床体内并且沿床体长度方向延伸设置,当待测人员沿床体长度方向卧躺时,驱动电机带动人体外部3d轮廓扫描装置和人体3d脊椎扫描装置移动并扫描人体。该驱动电机可以推动移动架沿导轨方向的进行移动,除了导轨结构外还可以采用丝杆结构的等其他结构作为导向结构,能够实现移动架的稳定移动即可,从而实现人体外部3d轮廓扫描装置和人体3d脊椎扫描装置对人体进行稳定的扫描工作。
74.另外,为了避免移动架造成患者不方便躺在床体上,在床体的一端设置有用于带动移动架进行翻转的翻转组件,当驱动装置带动移动架移动至床体的一端时,通过翻转组件使得移动架翻转至床体的下方,从而避免对患者的起身以及躺下造成干扰,而该翻转组件可以为与导轨组合形成链条与齿轮的运转结构。
75.床体包括有床板和床架以及调节装置,床板长度方向的一侧与床架铰接设置,调节装置用于驱动床板沿铰接端向上翻转,调节装置与操控终端通讯连接。调节装置包括有驱动气缸,驱动气缸与床板远离铰接端的一侧连接设置。
76.该调节装置的设计,当患者躺在床体上时通过调节装置能够使得患者双脚离地,这样可以使人体腰椎关节自然放松椎间隙自然放大不仅方便前期的检测的准确性而且方便后续进行治疗操作。而该调节装置除去驱动气缸外,还可以采用其他升降装置。
77.自动臂本体包括有数据接收单元、数据处理单元以及操作单元,数据接收单元与操控终端通讯连接,数据接收单元用于接收操控终端传输的治疗方案;
78.数据处理单元与数据接收单元电连接,数据处理单元用于根据治疗方案生成操作方案;
79.操作单元与数据处理单元电连接,操作单元用于根据操作方案进行治疗操作。
80.通过操控终端(操控电脑)将确定好的治疗方案发送至自动臂内,自动臂通过数据处理单元将治疗方案转化为自动臂的操作方案,操作方案包括有:自动臂的初始位置、力度、角度、手法速度等。也可以通过操控电脑直接将治疗方案转化为操作方案,实现对自动臂的控制。第一种方法相对于第二种方法的好处在于,当自动臂本体自成一个完整的机械体系时,当将自动臂本体的某个部件进行更换后,自动臂本体能够对新部件进行识别,从而实现后续的自动调节。
81.操作单元包括有复位头和伺服机构部,伺服机构部与数据处理单元电连接,复位头设置于伺服机构部上,伺服机构部用于带动复位头按压患者脊椎位置。伺服机构部控制作用力-位移曲线(确保力度、速度),来仿生这个手法,实现精准复位的目的。
82.复位头包括有设置于伺服机构部上的调节盘和若干设置于调节盘上的机械硅胶指,若干机械硅胶指的径长尺寸各不相同,调节盘与数据处理单元电连接设置,调节盘用于调节机械硅胶指的位置。
83.不同的机械硅胶指的设计:1、由于不同的患者其骨骼尺寸各不相同,所以针对其对应的尺寸选用对应尺寸的机械硅胶指(或者根据具体病况选择对应尺寸的机械硅胶指),从而达到最优的治疗效果。2、通过选用多个不同位置的机械硅胶指,实现不同的手法。
84.调节盘包括有安装盘和驱动机械硅胶指伸出或收回的控制件。该调节盘的设计通过收纳、伸出对机械硅胶指进行控制,避免多个机械硅胶指同时在时影响操作。
85.伺服机构部包括有依次设置于安装部件上的伸缩部、角度调节部以及按压部,伸缩部用于调节复位头距离患者的位置;
86.角度调节部用于调节复位头与患者之间的角度位置关系;
87.按压部用于调节复位头的下压力度和下压行程。
88.伸缩部包括有设置于安装部件上的外杆和滑移连接于外杆内的内杆以及驱动内杆移动的驱动件。
89.角度调节部包括有铰接于伸缩部上的转动头以及驱动转动头转动的旋转电机。该角度调节部可以采用万向调节结构,方便根据患者的躺姿进行调节。
90.按压部包括有驱动复位头移动的驱动气缸。
91.上述所提及的伸缩部的伸缩方式、角度调节部的调节方式、按压部的驱动方式,均可以由其他能够达到对应功能的相近似的结构所代替。
92.该伸缩部、角度调节部以及按压部能够完美仿生整骨手法,直接通过自动臂将患处靶向治疗。时间短,见效快,无痛苦,费用低等优点。效果显著。
93.复位头上还设置有力量测感器,力量测感器用于实时监测压力力度与患者脊椎状
态,并且将监测结果反馈至操控终端。
94.该力量测感器的设计,在按压过程中实时监测按压力度、以及脊椎反馈力,从而了解治疗进度,方便及时进行调整,从而保证治疗的有效性。
95.床体上设置有用于固定患者身体姿势的固定装置。床体上设置有用于控制调节装置和人体外部3d轮廓扫描装置以及人体3d脊椎扫描装置复位的一键复位开关。
96.该一键复位开关的设计能够方便操作人员进行操控,达到方便快速的效果。该固定装置用于固定患者身体,避免在检测过程中发生偏移,影响后续的检测结构,而该固定装置可以为捆绑带的形式设计。
97.人体外部3d轮廓扫描装置包括有激光扫描器。激光扫描器为非接触测量,用于扫描患者背部轮廓,并生成外部肌肉结构模型。
98.人体3d脊椎扫描装置包括有按压器和若干设置于按压器上的压力传感器。人体3d脊椎扫描装置为接触式测量,用于按压并探测患者脊椎结构,并生成内部骨骼结构模型;传感器再生系统为并列的高精度压力传感器构成。
99.该按压器能够实现上下移动,用于控制压力传感器与患者脊椎进行接触。
100.以上仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1