用于机器人臂的推车及用于臂的仓或盒装载的方法和装置与流程
用于机器人臂的推车及用于臂的仓或盒装载的方法和装置
1.相关申请的交叉引用本技术要求2017年6月20日提交的美国专利申请序列号62/522,494的优先权,该美国专利申请据此全文以引用方式并入。
背景技术:
2.本文所述的实施方案涉及用于机器人臂推车的装置和方法,该机器人臂推车用于将机器人臂运输、递送和固定到例如手术台。
技术实现要素:
3.本文描述了提供用于将机器人臂运输、递送和固定到手术台的机器人臂推车的装置和方法,该手术台具有患者可被安置在其上的台面。在本文所述的一些实施方案中,臂推车可容纳多个机器人臂。可选择机器人臂,并且将该机器人臂从臂推车内的存储位置移动到某个展开位置,在该展开位置中,机器人臂的至少一部分从臂推车突出。处于展开位置的机器人臂可联接到手术台并且与臂推车脱离。
附图说明
4.图1a和图1b分别是根据一个实施方案的手术台的示意性侧视图和示意性顶视图。
5.图1c是根据一个实施方案的机器人臂的示意性侧视图,其中机器人臂以延伸或使用构型示出;并且图1d是图1c的机器人臂的示意性侧视图,其中机器人臂以收缩或折叠构型示出。
6.图2a是根据一个实施方案的具有与其联接的机器人臂的手术台的示意性顶视图。
7.图2b是根据一个实施方案的具有与其联接的机器人臂和臂适配器的手术台的示意性顶视图。
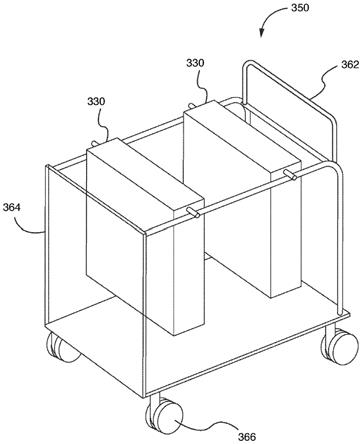
8.图3a是根据一个实施方案的臂推车的示意图。
9.图3b至图3g是根据一个实施方案的具有处于各种构型下的机器人臂的臂推车的示意性侧视图。
10.图4a和图4b是根据一个实施方案的具有处于两种构型下的机器人臂的臂推车的示意图。
11.图5是根据一个实施方案的使用外科机器人臂推车将外科机器人臂运输和传送到手术台的方法的流程图。
12.图6a和图6b是根据一个实施方案的具有处于两种构型下的旋转机构的臂推车的正面示意图。
13.图6c是图6a和图6b的臂推车的侧面示意图,其中臂推车具有处于图6b所示构型下的旋转机构。
14.图6d是图6a至图6c的旋转机构和机器人臂的示意图。
15.图6e是图6a至图6d的臂推车的示意图,其示出了手术台。
16.图6f是根据一个实施方案的使用外科机器人臂推车将外科机器人臂传送到手术台的方法的流程图。
17.图7和图8是根据两个实施方案的被构造成容纳机器人臂的臂仓的示意图图9是根据一个实施方案的臂推车的示意图。
具体实施方式
18.本文描述了提供用于将机器人臂运输、递送和固定到手术台的机器人臂推车的装置和方法,该手术台具有患者可被安置在其上的台面。在一些实施方案中,装置包括可接收和容纳多个机器人臂的臂推车。在臂推车内的机器人臂能够操作以在存储位置和展开位置之间移动。例如,处于存储位置的机器人臂可完全设置在臂推车内,但处于展开位置的机器人臂可至少部分地从臂推车突出。在一些实施方案中,机器人臂可竖直地设置在存储位置,并且枢转到水平位置,使得机器人臂可联接到手术台。在其他实施方案中,旋转机构可同时旋转多个机器人臂,以将所选择的机器人臂放置在展开位置。一旦处于展开位置,则机器人臂可滑向手术台,在该手术台处,机器人臂可与端口或其他合适的连接点配合。然后机器人臂可从臂推车脱离,并且可撤回臂推车。
19.如图1a至图1b示意性示出的,手术台100包括台面120、台支撑件122和台基部124。如图1a中示意性地示出的,台面120具有上表面,在外科手术期间,患者p可被安置在该上表面上。台面120设置在支撑件122上,该支撑件可以是例如位于地板上方合适高度处的基座。支撑件122(在本文中也称为基座)可以供台面120以期望数量的自由度移动,诸如在垂直方向或z方向上(地板上方的高度)、在水平的y方向上(例如,沿手术台的纵向轴)和/或在水平的x方向上(例如,沿手术台的横向轴)的平移,和/或围绕z轴、y轴和/或x轴的旋转。台面120还可包括可沿/围绕任何合适轴相对于彼此移动的多个区段,例如,用于躯干、一个或两个腿和/或一个或两个臂中的每一个的单独区段,以及头部支撑区段。可以手动地、由马达驱动、远程控制或通过任何其他合适的装置执行台面120和/或其组成区段的移动。用于台面120的支撑件122可安装到基部124,该基部可固定到手术室的地板,或者可(例如,通过使用基部124上的轮子)相对于地板移动。在一些实施方案中,支撑件122的高度可以被调节,其与例如台面120的运动(例如,轴向(纵向)或横向运动)一起可以允许台面120被定位在地板上方特定高度(例如,以允许外科医生接近)处且距支撑件120一定距离的期望手术部位处。这也可以允许联接到台100的机器人臂(例如,下文讨论的臂130)到达安置在台面120上的患者p的期望治疗目标。
20.在机器人辅助外科手术中,可以相对于安置在手术台100(在本文中也称为“台”)的台面120上的患者将一个或多个机器人臂130(在图1c和图1d中示意性地示出)设置在期望操作位置。一个或多个机器人臂可以用于为安置于手术台100上的患者执行外科规程。具体地讲,每个机器人臂的远侧端部可以设置在期望的操作位置,使得联接至机器人臂的远侧端部的医疗器械可以执行期望的功能。
21.如图1c和图1d中示意性地示出的,每个机器人臂130可以包括远侧端部部分137和近侧端部部分136。远侧端部部分137(在本文中也被称为“操作端部”)可以包括或具有与之联接的医疗器械或工具115。近侧端部部分136(在本文中也被称为“安装端部部分”或“安装端部”)可以包括联接部分以允许机器人臂130联接到台100。机器人臂130可以包括在关节
处联接在一起的两个或更多个连杆构件或区段110,该连杆构件或区段可以提供沿x轴、y轴和/或z轴中的一者或多者的平移和/或围绕x轴、y轴和/或z轴中的一者或多者的旋转(例如,在图1a和图1b中示出)。机器人臂130的联接部分可以包括联接机构139。联接机构139可以设置在臂130的安装端部136处,并且可以联接到区段110或者结合在区段110内。机器人臂130还包括设置在机器人臂130的安装端部136处或附近的目标关节j1,该目标关节可被包括在联接机构139和/或联接部分内,或可设置在联接到联接部分的机器人臂130的连杆或区段110上。目标关节j1能够操作以允许机器人臂130的远侧区段相对于台100枢转和/或旋转。机器人臂130可在用于在外科手术期间使用的各种延伸构型(诸如图1c所示)和在不使用时用于存储的各种折叠或收缩构型(诸如图1d所示)之间移动。
22.图2a至图2b示出了描述用于将机器人臂运输、递送和固定到手术台的装置和方法的各种实施方案。如上所述并且根据下文更详细地公开的各种实施方案,用于执行外科手术的机器人臂可以可释放地联接到手术台。在一些实施方案中,机器人臂可在台上的固定位置处联接,或可被联接为使得机器人臂可相对于桌面移动到多个位置。例如,如图2a示意性地示出的,机器人臂230可以联接到手术台200的台面220。手术台200在结构和功能上可以与上述手术台100相同或类似。例如,台面220具有上表面,在外科手术期间,患者p可被安置在该上表面上。在一些实施方案中,机器人臂230可在固定或可移动的位置处永久地或可释放地联接到与手术台联接或分离的臂支撑件(在本文中也称为臂适配器)。例如,如图2b示意性地示出的,臂适配器246可与台面220联接或分离,但该臂适配器能够与该台面接合或联接。机器人臂230可以联接到臂适配器246。
23.在准备机器人辅助的外科手术时,如相对于图2a和图2b所描述的,其中一个或多个机器人臂可释放地联接到手术台和/或臂适配器,经由臂推车可将每个机器人臂递送和连接至手术台和/或臂适配器。臂推车可被构造成支撑一个或多个机器人臂。根据各种实施方案,在下文进一步详细描述臂推车。
24.图3a至图3g示出了根据一个实施方案的臂推车350的各种构型。臂推车350被构造成容纳一个或多个机器人臂330或容纳机器人臂的仓。尽管只示出了两个机器人臂330,但是臂推车350可被构造成容纳、运输和/或递送任何合适数量的机器人臂330,诸如一个机器人臂、三个机器人臂或四个机器人臂。
25.如图3a所示,臂推车350包括轮子366、前部364和后部362。可旨在从后部362将臂推车350推入和/或拉出;例如,后部362可包括柄部362。臂推车350能够操作以存储未在使用的机器人臂330并且/或在存储装置和手术台(诸如手术台100)之间运输机器人臂330。如本文中进一步详细描述的,臂推车350的前部364可定位成靠近手术台(例如,前部364可设置在后部362和手术台之间),并且可将一个或多个机器人臂330从臂推车350传送到手术台。
26.如图3b至图3g所示,第一机器人臂330a和第二机器人臂330b以能够滑动的方式被设置在臂推车350内。同样指出,第一机器人臂330a和第二机器人臂330b可在x方向上移动,即,可在臂推车330的前部364和后部362之间移动。尽管图3b至图3g示出了x轴,但应当理解,该x轴不一定与图1b中示出的x轴相同。同样指出,图3b至图3g中的x方向可表示任何合适的水平方向。除此之外或另选地,第一机器人臂330a和/或第二机器人臂330b也可以能够旋转的方式被设置在臂推车350内。
27.臂推车350可支撑处于多种构型下的机器人臂330。在一些实施方案和/或构型中,臂推车350可支撑机器人臂330使得机器人臂330a的重心比臂推车350的一个或多个支撑结构(例如,托架)位置低,以便增加机器人臂330a和臂推车350的稳定性。在一些实施方案中,臂推车350可支撑机器人臂330使得臂推车350承载机器人臂330的大部分或全部重量,并且机器人臂330的联接机构(未示出)可以由使用者手动操作,而无需使用者承载机器人臂的大部分或全部重量。例如,可从臂推车350的结构悬挂机器人臂330或将该机器人臂搁置在臂推车350的结构上。在一些实施方案中,臂推车350可被构造成将机器人臂330固定到臂推车350。
28.臂推车350可包括臂容器352和基部354。臂容器352被构造成:在机器人臂330的存储和/或例如从存储区域到操作区域的运输期间,以及在将一个或多个机器人臂330从臂推车350传送到手术台用于在外科手术中使用的过程中,支撑、保护该一个或多个机器人臂330(例如,第一机器人臂330a和可选的第二机器人臂330b)并且/或促进该一个或多个机器人臂的无菌性。当该一个或多个机器人臂330由臂推车350存储和/或运输时,该一个或多个机器人臂330可被大部分地、基本上完全地或完全地保持在臂推车350的占有面积内,使得该一个或多个机器人臂330将不太可能遭受意外碰撞或损坏。在一些实施方案中,臂容器352可被构造成垂直延伸的保护框架,该框架与基部354一起限定用于存储该一个或多机器人臂330的空间。在一些实施方案中,当该一个或多个机器人臂330存储在臂推车350内时,机器人臂可被保持在基部354的周边内,但是可延伸超过臂容器352的周边。
29.基部354可被构造成支撑臂容器352,并且提供臂推车350到手术区域的运输。基部354可包括用于使臂推车350相对于地板移动的任何合适的装置。例如,基部354可包括轮子366,使得医疗提供方可将臂推车推入操作区域或从操作区域拉出臂推车。
30.臂推车350可包括有助于对准该一个或多个机器人臂330以沿x轴、y轴和/或z轴并且/或者围绕x轴、y轴和/或z轴旋转地将该一个或多个机器人臂传送到手术台的特征部。例如,如上所述,基部354可包括用于使臂推车350移动的任何合适的装置,使得臂推车350可相对于手术台沿x轴和/或y轴移动。另外,臂推车350可包括用于调整臂推车350和/或该一个或多个机器人臂330的高度的任何合适的装置,使得可相对于手术台调整该一个或多个机器人臂330的高度。因此,臂推车350可使该一个或多个机器人臂330沿x轴、y轴和/或z轴并且/或者围绕x轴、y轴和/或z轴旋转地移动,使得该一个或多个机器人臂330中的至少一个机器人臂的联接部分可对准以与台或台适配器上的配合联接部分接合。
31.在一些实施方案中,臂推车350容纳该一个或多个机器人臂330,使得在臂推车350接近手术台以及将该一个或多个机器人臂330传送到手术台的过程中,可将来自臂推车350的操作者的视线保持到手术台的要向其传送该一个或多个机器人臂330的部分。
32.可使用各种不同类型的联接和/或安装方法和机构将该一个或多个机器人臂330对接和/或安装到手术台。臂推车350可采用对应的联接方法和机构来提供机器人臂330从臂推车350到手术台和/或与手术台相关联的臂支撑件上的任何合适位置的有效传送。这样,臂推车350和手术台可包括共界面,使得机器人臂330可有效地且重复地联接到手术台和臂推车350并且/或从该手术台和该臂推车移除。
33.图3b至图3g示出了适于将第一机器人臂330a从臂推车350传送到手术台380的构型的示例序列,手术台380可在结构上和/或功能上与手术台100类似。如图3b和图3c所示,
第一机器人臂330a和第二机器人臂330b中的每一者均处于存储位置,并且可在臂容器352内在x方向上移动。如图3b至图3e所示,第二机器人臂330b可朝向臂推车350的后部362移动并且第一机器人臂330a可朝向中间移动,以提供足以用于第一机器人臂330a在z方向上围绕y轴从存储位置枢转到展开位置的间隙,其中第一机器人臂330a的所有部分或至少一部分设置在臂容器352之外。
34.图3f和图3g示出了在x方向上滑动的在臂容器352之外的第一机器人臂330a。例如,如图3g所示,第一机器人臂330a可在延伸时与手术台380配合或以其他方式联接到该手术台。在一些实施方案中,手术台的基部354能够操作以调整臂推车330的高度并且/或与手术台380的基部连接,用于对准或以其他方式便于将第一机器人臂330a传送到手术台380。
35.在一些实施方案中,第一机器人臂330a在被联接到手术台380后,可展开或以其他方式改变其构型。一旦联接到手术台,则第一机器人臂330a可经由手术台380被控制,并且能够操作以通过任何合适的方式移动和/或做关节运动。
36.在一些情况下,在第一机器人臂330a联接到手术台380之后,可远离手术台380移动臂推车350,并放在一边,直到外科手术完成。然后,可反向执行图3b至图3g所示的过程,并且将第一机器人臂330a放回臂推车350的臂容器352内。
37.在一些情况下,在第一机器人臂330a联接到手术台380之后,可将臂推车350移动到另一位置,并且可经由类似的技术将第二机器人臂330b传送到手术台380。在一些情况下,臂推车350可被构造成使得可在前部364靠近手术台380时将第一机器人臂330a传送到手术台380,并且可在后部362靠近手术台380时将第二机器人臂330b传送到该手术台。在一些实施方案中,第一机器人臂330a和第二机器人臂330b能够操作以在相对的方向上枢转。在其他实施方案中,第一机器人臂330a和第二机器人臂330b中的一者或两者能够操作以在任何方向上枢转。
38.尽管将机器人臂330示出为可在x方向上移动,但应当理解,在其他实施方案中,机器人臂330可在y方向上移动。例如,臂推车350能够操作以经由臂推车350的左侧部分或右侧部分(例如,而不是经由前部364和/或后部362)来联接机器人臂。例如,在一些此类实施方案中,机器人臂330在臂容器352内为正方形布置。在一些此类实施方案中,至少一个机器人臂能够操作以经由臂推车350的前部364和/或后部362来联接到手术台380,同时至少一个其他机器人臂能够操作以经由臂推车的左侧部分和/或右侧部分来联接到手术台380。
39.尽管图3b至图3g示出了第一机器人臂330a被定位在第二机器人臂330b的前部并且经由臂推车350的前部364联接到手术台380,但是应当理解,在其他情况下,在第一机器人臂330a联接到手术台380之前,可选择被示出为定位在第一机器人臂330a的后部的第二机器人臂330b,并且将该第二机器人臂联接到手术台380。例如,在一些实施方案中,第二机器人臂330b可经由外科推车350的后部362来联接到手术台,同时第一机器人臂330a保持在存储位置。在其他实施方案中,第二机器人臂330b可在第一机器人臂上方滑动并且经由外科推车的前部364来联接到手术台380,同时第一机器人臂330a保持在存储位置。
40.图4a和图4b示出了根据与上文参考图3a至图3g示出和描述的实施方案类似的实施方案的臂推车1050和手术台1000。图4a和图4b的机器人臂1035中的每一个均设置在相应的臂仓1030内。臂仓1030a和1030b可以与上文参考图3a至图3g描述的机器人臂330的移动类似的方式在臂推车1050内移动。如图4a所示,臂仓1030a至少部分地设置在臂推车1050之
外。臂仓1030a可包括可移动以从臂仓1030a弹出机器人臂1035的致动器1039。在一些实施方案中,可手动移动致动器1039以弹出机器人臂1035。在其他实施方案中,例如,当臂推车1050检测到其与手术台1000正确对准并且/或当使用者致动马达或其他合适的机构时,可从臂仓1030a自动弹出机器人臂1035。在从臂仓1030a自动弹出(例如,无需使用者向致动器1039施加物理力)机器人臂1035的实施方案中,臂仓1030a可不包括致动器1039。在其他实施方案中,当机器人臂1035部分地和/或完全地设置在臂仓1030a内时,机器人臂1035可联接到手术台1000;通过远离手术台1000移动臂推车1050,可从臂仓1030a抽出机器人臂1035。
41.如图4b所示,机器人臂1035已经从臂仓1030a弹出,并且联接到手术台1000。手术台包括被构造成接收机器人臂1035的联接机构1044。在一些实施方案中,外科臂1035能够操作以围绕联接机构1044旋转。外科臂1035也可经由联接机构1044接收电力和/或控制信号。
42.除此之外或另选地,臂仓1030可包括闩锁,诸如图9示出的闩锁939。图9示出了臂推车950和臂仓930,该臂推车和该臂仓中的每一者在结构上和/或功能上分别与臂推车1050和/或臂仓1030类似。当闩锁939被致动时,可将设置在臂仓930内的机器人臂(图9中未示出)保持在固定位置。当闩锁被停用(例如,通过按下闩锁或经由电子装置停用闩锁)时,机器人臂可在臂仓930内自由移动,例如使得机器人臂被传送到手术台。图9进一步示出了其中臂仓930能够操作以在与图2a至图3g示出的方向相对的方向上枢转的实施方案。
43.图5是使用外科机器人臂推车将外科机器人臂运输和传送到手术台的方法400的流程图,其中外科机器人臂推车诸如为上文示出和描述的臂推车350和/或1050。方法400包括在402处将一个或多个机器人臂装载到臂推车上。例如,该一个或多个机器人臂可折叠成适于运输和/或装载到臂仓(例如,臂仓1030)中的构型。同样指出,该一个或多个机器人臂和/或臂仓可以可释放地联接到臂推车的臂支撑件。例如,如图3a至图3c所示,机器人臂可以垂直构型设置在臂推车内。臂支撑件可联接到臂推车的基部,以将该一个或多个机器人臂支撑在基部上方。基部可在支撑表面上自由移动。在404处,然后将臂推车运输到操作区域并且使其靠近手术台。
44.在406处,机器人臂可从垂直取向枢转到水平构型,例如,如图3c至图3e所示。在408处,机器人臂可滑向手术台,例如,如图3e和图3f所示。在机器人臂设置在仓内的实施方案中,在410处,可从仓弹出机器人臂,例如,如图4a和图4b所示。在412处,机器人臂可联接到手术台。在414处,然后可从臂推车释放机器人臂;并且在416处,远离操作区域运输臂推车。
45.在一些实施方案中,如果第二机器人臂被装载到臂推车上,则臂推车可将第一机器人臂联接到手术台,并从臂推车释放第一机器人臂,然后将该第一机器人臂运输到靠近手术台另一部分的位置。然后,可通过重复步骤406至414将第二机器人臂联接到手术台。
46.图6a和图6b是根据一个实施方案的处于两种构型下的臂推车650的示意性前视图。图6c是处于图6b示出的构型下的臂推车650的示意性侧视图。臂推车650可包括臂容器652和基部654,该臂容器和该基部在结构上和/或功能上类似于如上文分别示出和描述的臂容器352和/或基部354。
47.臂推车650包括联接到旋转机构670的多个机器人臂630。如图所示,旋转机构670
为五边形,并且可被构造成接收四个机器人臂630(第一机器人臂630a、第二机器人臂630b、第三机器人臂630c和第四机器人臂630d),但是应当理解,旋转机构670可为任何合适的形状,并且可被构造成接收任何合适的数量的机器人臂630。旋转机构670能够操作以将机器人臂630和/或旋转机构的被构造成接收机器人臂的部分移动到装载/卸载区域635中。可经由装载/卸载区域635向臂推车650装载和/或从该臂推车卸载机器人臂630。
48.图6a示出了存储构型下的臂推车650,其中所有四个机器人臂630均设置在臂推车650的臂容器652部分内。同样指出,在存储构型下,在装载/卸载区域635中可能未设置机器人臂650和/或旋转机构670的能够操作以接收机器人臂的部分。旋转机构670可转动(例如,手动地和/或通过机械、电气、液压等的驱动装置转动),从而使所有机器人臂630同时移动,并且使得第一机器人臂630a从存储位置移动到装载/卸载区域635中的展开位置,如图6b所示。在一些实施方案中,在展开位置,第一机器人臂630a部分或完全在臂容器652之外。图6c是处于图6b示出的构型下的臂推车650的侧视图。为了便于说明,在图6c中未示出第二机器人臂630b和第四机器人臂630d。
49.图6d是联接到旋转机构670的第一机器人臂630a的示意图。第一机器人臂630a和其余的机器人臂630(图6d中未示出)可以可滑动地联接到旋转机构670。在一些实施方案中,机器人臂630可以可释放地闩锁到旋转机构,使得机器人臂相对于旋转机构固定,直到闩锁被释放。这样,当机器人臂630设置在装载/卸载区域635中时,可以(可选地解锁并且)在向前(或向后)方向上水平地滑动该机器人臂630,使得机器人臂630可由手术台680接收,如图6e所示。如图6d所示,机器人臂630包括目标关节j1,如上文所讨论的,该目标关节可联接到手术台680。一旦机器人臂630联接到手术台680,则机器人臂630可从旋转机构670脱离,并且可撤回臂推车650。
50.尽管图6b、图6c和图6e示出并描述了第一机器人臂630a联接到手术台680,但是应当理解,通过将旋转机构670旋转到适当位置,可选择设置在臂推车650内的任何机器人臂630并将其联接到手术台680。例如,在一些实施方案中,可将多个机器人臂630联接到一个手术台680,用于手术。
51.图6b、图6c和图6e还示出并描述了,当机器人臂630被构造成联接到手术台680时,该机器人臂630设置在臂容器652之外。同样指出,图6a至图6c示出了装载/卸载区域635至少部分地设置在臂容器652之外。然而,应当理解,在其他实施方案中,臂推车650可包括通过其可滑动机器人臂630的端口或其他类似的开口。在此类实施方案中,可转动旋转机构670,使得期望的机器人臂630与端口对准,并且该机器人臂630可以通过开口滑动,而无需该机器人臂先前移动到臂容器652之外。
52.图6f是使用外科机器人臂推车将外科机器人臂运输和传送到手术台的方法1600的流程图,该外科机器人臂推车诸如为上文参照图6a至图6e示出和描述的包含旋转机构670的臂推车650。方法1600包括在1602处将一个或多个机器人臂装载到臂推车上。例如,该一个或多个机器人臂可折叠成适于运输和/或联接到旋转机构的构型。在1604处,然后将臂推车运输到操作区域并且使其靠近手术台。
53.在1606处,可转动旋转机构,例如,如图6a和图6b所示。在1606处转动旋转机构可使联接到旋转机构的机器人臂中的每一者同时移动,并且可使一个机器人臂置于在展开位置处(例如,如图6b和图6c所示)。可选地,在1608处,选择的机器人臂可滑向手术台,例如,
如图6d和图6e所示。在其他实施方案中,转动旋转机构可使所选择的机器人臂就位以联接到手术台。在此类实施方案中,转动旋转机构的行为可使机器人臂的目标关节j1与手术台的联接机构接触,并且/或一旦所选择的臂处于展开位置,则可移动整个臂推车以使该机器人臂与手术台的联接机构接触。
54.在1612处,机器人臂可联接到手术台。在1614处,然后可从臂推车释放机器人臂;并且在1616处,远离操作区域运输臂推车。在一些实施方案中,如果第二机器人臂被装载到臂推车上,则臂推车可将第一机器人臂联接到手术台,并从臂推车释放第一机器人臂,然后将该第一机器人臂运输到靠近手术台另一部分的位置。然后,可通过重复步骤1606至1614将第二机器人臂联接到手术台。
55.图7是根据一个实施方案的被构造成设置和/或存储在仓730内的机器人臂735的示意图。仓又可被构造成存储在臂推车的臂容器内,例如,如上文参考图4a和图4b示出和描述的。如图7所示,机器人臂735可包括多个关节,并且可做关节运动成为用于存储的紧凑构型。
56.机器人臂735包括目标关节j1,该目标关节可在机器人臂735处于收起构型下时设置在臂仓730的顶部内。这样,可通过目标关节j1将机器人臂735从臂仓730中抽出和/或放置在该臂仓中。例如,可通过臂仓730的打开的(或可打开的)顶部(或另一侧)将机器人臂735放置在臂仓730中或者从该臂仓移除该机器人臂。机器人臂735可经由目标关节j1联接到手术台。例如,当在臂仓730和手术台之间传送机器人臂时,臂仓730可定位成靠近手术台,并且机器人臂735可以首先从臂仓目标关节j1移动,或者最后移动到臂仓735目标关节j1。这样,当机器人臂735从臂仓730传送到手术台时,目标关节j1可以是机器人臂735的接触手术台的第一部分(并且仅在一些实施方案中),并且/或者当机器人臂735传送到臂仓730时,目标关节j1是机器人臂735的要进入臂仓730的最后一部分。
57.臂仓730包括能够操作以将臂仓730联接到臂推车的支撑特征部732。支撑特征部可包括轴承、铰链、圆柱形关节、旋转关节和/或任何其他合适的特征部,该任何其他合适的特征能够操作以允许臂仓730能够操作以允许臂仓730在臂推车内滑动、枢转、旋转或以其他方式移动。
58.图8是根据一个实施方案的容纳机器人臂835的臂仓830的示意图。臂仓830可类似于上文描述的臂仓730。如图8所示,臂仓830包括轴颈832和柄部838。在存储构型下,臂仓830能够操作以垂直地设置在臂推车内(例如,,以其中臂仓830的包括柄部838的部分设置在臂仓830的包括轴颈832的部分下方的取向)。在使用中,通过柄部838抓握臂仓830并使该臂仓围绕轴颈832旋转,例如,以展开或接收机器人臂835。
59.虽然上文已经描述了各种实施方案,但应当理解,它们仅以举例方式而非限制方式呈现。例如,如参考图8示出和描述的,臂仓830可包括柄部。应当理解,本文所述的其他臂仓和/或机器人臂可包括柄部或类似结构。还应当理解,可由手经由柄部或类似结构对臂仓和/或机器人臂进行运输、装载、卸载和其他操纵。例如,可在各位置之间手动地使臂仓和/或机器人臂解除携带状态,并且/或通过柄部或其他类似结构将该臂仓和/或机器人臂装载到臂推车中。
60.在上述方法表明某些事件按某种顺序发生的情况下,某些事件的排序可能会被修改。另外,如果可能,某些事件可以在并行过程中同时执行,以及如上所述顺序地执行。
61.例如,在一些实施方案中,机器人臂可在臂推车内移动,使得在合适的位置处呈现与机器人臂相关联的联接构件(例如,目标关节j1),用于接合与台相关联的互补联接构件。例如,臂推车可将机器人臂调整到各种高度设置,使得机器人臂可与各种手术台和/或手术台的在变化高度下的各种联接部分配合。例如,在一些实施方案中,臂推车可在臂推车内执行高度调整的第一宏阶段,在该阶段中,机器人臂推车被设置为高、中或低高度范围。然后可将臂推车移动到相对于手术台的位置,使得机器人臂的联接构件相对于x轴和/或y轴与手术台相关联的联接构件对准。然后,在高度调整的第二微阶段中,臂推车可使机器人臂推车的联接构件沿z轴向上或向下移动为与手术台的互补联接构件接合。在臂推车将机器人臂设置为适当的高、中或低宏设置之后,可使臂推车朝向手术台移动。当臂推车沿x轴和y轴正确地对准时,可由臂推车将联接构件降低(沿z轴)为接合手术台的联接构件。可选地,当臂推车沿x轴和y轴正确地对准时,可将机器人臂升高(沿z轴)为接合手术台的联接构件。
62.在上文所述的示意图和/或实施方案表示以某些取向或位置布置的某些部件的情况下,可以修改部件的布置。虽然已经具体示出并描述了实施方案,但是应当理解,可以进行形式和细节上的各种变化。本文所述的装置和/或方法的任何部分可以除互相排斥的组合之外的任何组合进行组合。本文所述的实施方案可包括所述的不同实施方案的功能、部件和/或特征的各种组合和/或子组合。
63.一些实施方案将各种特征部、轴和/或方向描述为“水平”或“垂直”。通常,术语“垂直”应当被理解为近似平行于(例如,+/-15度)重力方向的方向。类似地,“水平”应当被理解为近似垂直于(例如,+/-15度)重力方向和/或近似平行于地平面(例如地板)的方向。在将部件(例如,机器人臂和/或臂仓)描述为垂直或水平的情况下,应当理解为是指部件的主轴在垂直或水平方向上定向。当用于描述机器人臂时,如果机器人臂的关节主要设置在大致水平的平面中,则该机器人臂是“水平的”。如果机器人臂的关节主要设置在大致垂直的平面中,则该机器人臂是“垂直的”。当用于描述臂仓时,如果臂仓容纳(或被构造成容纳)处于垂直取向的机器人臂,则该臂仓是“垂直的”。如果臂仓容纳(或被构造成容纳)处于水平取向的机器人臂,则该臂仓是“水平的”。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1