一种四肢断层超声三维透视成像装置及其成像方法与流程
1.本发明涉及超声扫描成像设备技术领域,特别涉及一种三维超声波扫描装置。
背景技术:
2.超声成像是利用超声声束扫描人体,通过对载有人体组织或结构性质特征信息的接收、处理,以获得体内器官或组织的图像。超声由于具有无电离辐射、价格低廉、使用便捷等优点,成为当今临床医学中重要的影像学诊断手段。但是传统的超成像系统获取的是人体内二维剖面图像,医生手持并移动探头,不断获取人体内不同位置的剖面图像,在大脑内重建形成人体诊断区域内组织器官的整体状态。这种方式不仅诊断效率极低,而且很大程度上依赖医生的技术水平,很容易造成诊断失误。四肢软组织影像检查中超声具有经济、方便、软组织高分辩率等优点,在四肢神经、肌腱的分辩率显著优于磁共振且可实时动态追踪,常规二维超声不直观,大部分临床医师看不懂超声图像,难于有效用于临床手术方案的指导与疾病诊断。
技术实现要素:
3.本发明的目的在于提供一种四肢断层超声三维透视成像装置,利用超声进行四肢的断层扫查,获取四肢的完整的断层扫查超声图像数据,然后通过超声图像自动特征获取和特征判断,在超声检测完成后生成三维图像。通过超声扫描检测的方式代替x光扫查,保护被检测者健康安全,提供一种绿色安全的四肢扫查结果获取方式。
4.为实现上述目的,本发明采用以下技术方案:
5.一种四肢断层超声三维透视成像装置,包括桶体,所述桶体内侧设置有三维扫描模块。
6.所述三维超声扫描模块包括超声探头以及用于驱动超声探头往复运动以完成扫查工作的驱动装置及驱动装置控制模块。
7.进一步的,所述超声探头有多个,均布于桶体内侧,多个超声扫描模块的超声探头位于同一平面且在扫查工作时同步运动。
8.进一步的,所述超声探头为环形超声探头,驱动装置及驱动装置控制模块用于驱动控制环形超声探头往复运动以完成扫查工作。
9.进一步的,所述超声探头与超声主机相连,向超声主机传输超声图像数据。
10.进一步的,所述超声主机内设置有计算机视觉识别分析软件,可以对所采集的数据图像中测定要素进行自动识别与数据分析。智能识别神经,血管,骨骼等结构,然后对识别结构进行渲染与三维重建。
11.进一步的,所述驱动装置包括丝杆传动装置,所述丝杆传动装置包括驱动电机和传动丝杆,超声探头设置于传动丝杆之上。
12.进一步的,所述驱动装置两端分别设置有初始接近开关和终点接近开关,所述初始接近开关和终点接近开关用于反馈控制超声探头的初始位置和终点位置。
13.进一步的,所述初始接近开关和终点接近开关可移动的设置在所述驱动装置长度方向上,以实现方便的调节超声探头的初始位置和终点位置的目的。
14.进一步的,所述桶体内设置有肢体固定模块,用于固定手臂或者腿部。
15.进一步的,所述桶体内侧还设置有耦合介质存储装置,所述耦合介质存储装置内装有超声耦合介质。
16.一种四肢断层超声三维透视成像的成像方法,包括:对于四肢断层超声三维透视成像装置所获得的四肢断层超声扫描图像,通过标记软件,对四肢断层超声扫描图像内的解剖结构进行标记,然后应用人工智能图像识别技术对标记后的超声图像数据进行人工智能识别与自动学习,建立针对四肢断层超声扫描图像结构识别算法,通过建立的算法去识别并标记图像中相应的解剖结构,然后通过三维及色彩渲染、透视化处理计算机图像处理技术,实现四肢各器官结构的三维透视化重建。
17.具体的,针对四肢断层超声三维透视成像装置获得的规范化的序列超声图像,我们通过基于弱监督学习的样本自动标注、监督训练、cnn多目标分类器,通过n个候选目标生成精准标记样本,以增加有效样本量。通过识别断层超声图像内不同组织结构,进行量化,并提取诊断特征,包括:深度学习、语义分割、度量厚度、纹理结构,进行多级分段(0/1诊断),发现影像特征及深度特征,然后通过声像图动态分析,最终实现声像图自动量化度量,提取声像图特征。然后研究可解释、具有诊断依据的智能诊断模型,争取实现现有端到端算法的透明化,将对影像组学特征、量化度量、征象识别及预处理结果进行分析,通过影像分类模型、抽象特征进行特征学习,并建立低秩稀疏回归模型,找出可解释的特征,建立针对四肢断层超声扫描图像结构识别算法,最终形成疾病诊断依据,实现疾病鉴别诊断、结构损伤预警等应用。
18.本发明提供一种四肢断层超声三维透视成像装置,将超声探头可移动的设置在桶体内侧,对患者的四肢可进行全方位扫查,超声探头所产生的数据传输至超声主机,所述超声主机内设置有计算机视觉识别分析软件,可以对所采集的数据图像中测定要素进行自动识别与数据分析。智能识别神经,血管,骨骼等结构,然后对识别结构进行渲染与三维重建,超声主机实时显示三维图像。
附图说明
19.图1为本发明的一种具体实施例结构示意图。
20.图2为本发明的另一种具体实施例结构示意图。
21.图3为本发明的一种具体实施例扫查结果显示图。
22.图4为本发明的一种具体实施例扫查结果显示图。
23.图5为本发明的一种具体实施例扫查结果显示图。
24.图6为本发明的一种具体实施例扫查结果显示图。
25.图7为本发明的一种具体实施例扫查结果显示图。
26.图8为本发明的一种具体实施例扫查结果显示图。
具体实施方式
27.下面结合附图,对本发明的技术方案做进一步解释说明。
28.实施例1:
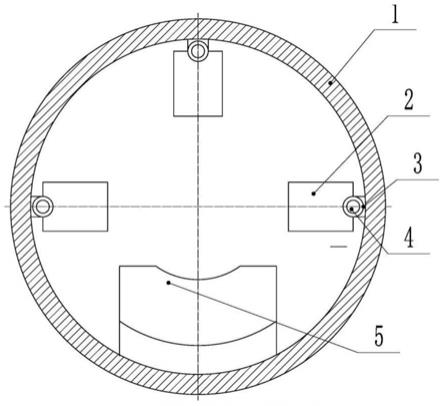
29.一种四肢断层超声三维透视成像装置,包括桶体1,所述桶体1内侧设置有三维超声扫描模块。
30.所述三维超声扫描模块包括超声探头2以及用于驱动超声探头往复运动以完成扫查工作的驱动装置3及驱动装置控制模块。
31.所述超声探头2有多个,均布于桶体内侧,多个超声扫描模块的超声探头位于同一平面且在扫查工作时同步运动。
32.所述超声探头2与超声主机相连,向超声主机传输超声图像数据。
33.所述驱动装置3包括丝杆传动装置,所述丝杆传动装置包括驱动电机和传动丝杆4,超声探头3设置于传动丝杆4之上。
34.所述驱动装置3两端分别设置有初始接近开关和终点接近开关,所述初始接近开关和终点接近开关用于反馈控制超声探头的初始位置和终点位置。
35.所述初始接近开关和终点接近开关可移动的设置在所述驱动装置长度方向上,以实现方便的调节超声探头的初始位置和终点位置的目的。
36.所述桶体1内设置有肢体固定模块5,用于固定手臂或者腿部。
37.进一步的,所述桶体1内侧还设置有耦合介质存储装置,所述耦合介质存储装置内装有超声耦合介质。
38.实施例2:
39.一种四肢断层超声三维透视成像装置,包括桶体1,所述桶体1内侧设置有三维超声扫描模块。
40.所述三维超声扫描模块包括超声探头2以及用于驱动超声探头往复运动以完成扫查工作的驱动装置3及驱动装置控制模块。
41.所述超声探头2为环形超声探头,驱动装置3及驱动装置控制模块用于驱动控制环形超声探头往复运动以完成扫查工作。
42.所述超声探头2与超声主机相连,向超声主机传输超声图像数据。
43.所述驱动装置3包括丝杆传动装置,所述丝杆传动装置包括驱动电机9和传动丝杆4,超声探头2设置于传动丝杆4之上。
44.所述驱动装置3两端分别设置有初始接近开关7和终点接近开关8,所述初始接近开关7和终点接近开关8用于反馈控制超声探头的初始位置和终点位置。
45.所述初始接近开关7和终点接近开关8可移动的设置在所述驱动装置3长度方向上,以实现方便的调节超声探头2的初始位置和终点位置的目的。
46.所述桶体1内设置有肢体固定模块5,用于固定手臂或者腿部。
47.所述桶体内侧还设置有耦合介质存储装置,所述耦合介质存储装置内装有超声耦合介质。
48.本发明提供一种可以实现超声探头立体扫描三维成像的超声波三维成像装置。患者将肢体放入本发明提供的四肢断层超声三维透视成像装置的桶体中,超声探头在驱动装置的带动下往复运动,完成肢体的扫查,将数据传输至超声主机,经过超声主机处理后显示实时的三维图像。本发明利用超声进行四肢的断层扫查,获取四肢的完整的断层扫查超声图像数据,然后通过超声图像自动特征获取和特征判断,智能识别神经,血管,骨骼等结构,
然后对识别结构进行渲染与三维重建,得到清晰完整的三维图像,方便医生进行观察诊断。
49.具体的,超声图像自动特征获取和特征判断的过程如下:对于四肢断层超声三维透视成像装置所获得的四肢断层超声扫描图像,通过标记软件,采用人工的方法对断层超声图像内的解剖结构如神经、血管、骨骼等进行标记。然后应用神经网络等人工智能图像识别技术对标记后的超声图像数据进行人工智能识别与自动学习,建立针对四肢断层超声扫描图像结构识别算法。通过建立的算法去识别并标记图像中相应的解剖结构(如附图4、5、6),然后通过三维及色彩渲染、透视化处理计算机图像处理技术,实现四肢各器官结构的三维透视化重建(如附图7、8)。通过四肢各器官结构的三维透视化重建图,可以清楚了解各器官结构之间的关系及病变部位,为临床疾病的诊断及手术方案的治疗提供精准、可靠以及直观的信息。此处特别说明,说明书附图3-8中图像黑白成像,灰度不相同,在实际成像时,灰度不同的地方用不同颜色加以渲染以更方便识别。
50.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
51.以上对本发明及其实施方式进行了描述,这种描述没有限制性,附图中所示的也只是本发明的实施方式之一,实际的结构并不局限于此。总而言之如果本领域的普通技术人员受其启示,在不脱离本发明创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1