一种高精确上斜肌折叠缝线辅助器
1.本发明涉及眼科医疗设备领域,具体为一种高精确上斜肌折叠缝线辅助器。
背景技术:
2.上斜肌为起自总腱环的内上方、附着于眼球中纬线或赤道稍后偏外侧巩膜上的横纹肌。全长约60毫米,为眼外肌中最长的肌肉。上斜肌沿眶上壁与眶内壁交角处前行,将达眶缘处变为肌腱,并穿过滑车后折向外后下方,在上直肌下方呈扇形展开,止于眼球赤道之后的后外上象限的巩膜上。上斜肌的功能主要是用于控制眼球的内旋、下转和外转。
3.上斜肌折叠术是一种上斜肌加强手术,术中按照一定折叠量将上斜肌进行折叠缝线。上斜肌折叠术多用于上斜肌麻痹患者,可只做患者上斜肌折叠,或同时做以下旋转垂直肌之一:患眼下斜肌减弱、患眼上直肌后退、健眼下直肌后退等。目前在上斜肌折叠手术中,多采用斜视钩或采用折叠器配合斜视钩将肌肉连同肌鞘钩起,使得肌肉折叠一定的量,再用缝线将折叠处对穿、扎牢。
4.但是,目前采用的上斜肌折叠方式仍存在以下不足:
5.1.在对上斜肌的折叠操作时,需要施术者一手持住折叠器以将上斜肌维持在折叠状态,另一只手进行缝针操作,在此段手术过程中,施术者不仅需要握持住折叠器使其稳定地保持在某一位置,还需要时刻把持对折叠器所施加的力,以保证肌肉折叠量的准确性,因此易造成手部乏力、发抖的情况,导致对斜视钩和折叠器的控制力下降,可能造成肌肉折叠松弛或折叠过度;此外,当一只手专注缝线时,另一只手容易不受控制地松弛,易造成折叠的肌肉松弛,导致缝线位置发生偏差,影响手术效果。
6.2.在手术过程中,需要在缝线前确定好肌肉的折叠量,确定好折叠量后只能通过手的力度控制在所确定的折叠量,若只采用斜视钩折叠肌肉,则需要依靠施术者的经验控制折叠量,而这种方式会不可避免地发生较大误差;若采用具有刻度的折叠器,则需要施术者频繁观察刻度以控制折叠量(通过调整钩子拉起的程度),但调整后的折叠器仍难以较长时间保持稳定,为保持手术的精确性,需要频繁地进行调整,增大施术者的操作难度和心理压力。
7.3.在上斜肌折叠完成后,即使肌肉折叠量完全准确,但仍需要施术者根据自身经验判断缝针的位置,而对于一些手术经验不足的施术者来说,确定的缝针位置可能产生较大的偏差,难以保证每一针穿刺位置能够达到足够的准确性;此外,由于折叠器本身或钩体的阻碍,导致穿针较为不便。
技术实现要素:
8.本发明的目的是针对上述背景技术中存在的问题,提供一种高精确上斜肌折叠缝线辅助器,采用可单手握持的结构实现对上斜肌的牵拉和折叠,并可以方便地调整牵拉程度以控制肌肉的折叠量,在调整至准确的肌肉折叠量时自动锁定,还可以在调整肌肉折叠量的同时通过监测机构简单、直观地判断肌肉折叠量的准确性。
9.为了实现上述发明目的,本发明采用了以下技术方案:
10.一种高精确上斜肌折叠缝线辅助器,包括握持手柄、折叠夹和牵拉机构,所述折叠夹固定于所述握持手柄的其中一端部,折叠夹包括有相互对称设置的第一半夹和第二半夹,所述第一半夹和第二半夹均留有贯穿内外壁的贯穿孔,所述第一半夹和第二半夹之间形成用于所述牵拉机构通过的缝隙空间;所述牵拉机构包括控制杆和用于勾住上斜肌的钩体,所述钩体与所述控制杆其中一端一体化成型,所述控制杆另一端穿过所述缝隙空间进入所述握持手柄中;所述握持手柄设有调控机构和监测机构,其中,
[0011]-调控机构:用于控制所述牵拉机构的伸缩和锁定;
[0012]-监测机构:用于实时获取所述牵拉机构的伸缩量,通过所获取的伸缩量数据判断上斜肌的折叠程度。
[0013]
优选的,控制杆在位于握持手柄内部的部分表面设有锯齿部,所述调控机构包括调节滚轮、弹性复位板和锁定结构,所述调节滚轮固定连接有可与所述锯齿部相啮合的齿轮,所述调节滚轮通过活动转轴与所述握持手柄旋转连接,调节滚轮由握持手柄向外部分露出,所述齿轮在弹性复位板的弹力作用下处于脱离所述锯齿部的状态,所述锁定结构包括杠杆、卡齿和活动连接部,所述杠杆通过固定转轴连接握持手柄,所述卡齿和活动连接部分别固定连接于所述杠杆两端部,所述活动连接部连接所述活动转轴,所述卡齿朝向所述锯齿部设置,所述调控机构以如下方式运作:在所述齿轮完全脱离锯齿部时,所述卡齿嵌入所述锯齿部的齿槽中;在所述齿轮与锯齿部相啮合时,所述卡齿完全脱离所述锯齿部的齿槽。
[0014]
优选的,监测机构包括有刻度板和指针,所述刻度板与所述控制杆位于握持手柄中的部分相对固定设置,所述握持手柄上设有可视窗口,所述指针位于所述可视窗口中,所述刻度板朝向所述可视窗口设置。
[0015]
优选的,贯穿孔沿着夹头的轮廓成型,使得夹头形成框状结构,所述夹头在端部形成直型边框,所述直型边框贯穿设置有穿针孔;所述钩体包括钩身和直型钩头,所述直型钩头端与所述钩身一体化成型,直型钩头平行于所述直型边框设置。
[0016]
优选的,控制杆的轴心所在平面平分所述直型钩头,所述钩身与控制杆的轴心之间的夹角为15-60
°
。
[0017]
优选的,折叠夹还设有用于使上斜肌被夹紧在第一半夹和第二半夹之间的夹紧机构。
[0018]
优选的,夹紧机构包括控制钮、活动卡齿和固定卡齿,所述控制钮设于第一半夹的外侧,所述活动卡齿由第一半夹内侧贯穿至外侧并规定连接至所述控制钮,所述固定卡齿固定设置于第二半夹的内侧,通过所述控制钮控制活动卡齿和固定卡齿的咬合和分离,当活动卡齿和固定卡齿相互咬合时,第一半夹和第二半夹相向夹紧。
[0019]
优选的,控制钮与第一半夹弹性连接,当所述控制钮受到与弹力方向相反的推力时,所述活动卡齿趋向于远离所述固定卡齿;当控制钮失去推力时,所述活动卡齿趋向于靠近所述固定卡齿。
[0020]
其中,所述监测机构除了公开了上述技术方案外,还公开了一种更加智能化的技术方案,具体方案如下:
[0021]
监测机构包括有显示屏、光栅板、光栅传感器、数据处理器和供电器,所述显示屏
设于握持手柄表面,所述光栅板与所述控制杆位于握持手柄中的部分相对固定设置,光栅传感器设于所述光栅板的运动路径上,所述光栅传感器、芯片和供电器均内置于握持手柄内部,所述显示屏、光栅传感器、供电器均与所述数据处理器电连接。
[0022]
优选的,监测机构还包括有拉力传感器,所述拉力传感器内置于握持手柄中,所述拉力传感器的感应端连接所述控制杆,且拉力传感器与所述数据处理器电连接,所述拉力传感器所测得的拉力数值被转化为警示信号并显示在所述显示屏中。
[0023]
与现有技术相比,采用了上述技术方案的高精确上斜肌折叠缝线辅助器具有如下有益效果:
[0024]
一、通过手指稍微施力按下并拨动调节滚轮的方式,可以更方便地对已钩住上斜肌的牵拉机构进行伸缩程度的调节,当调至所需的肌肉折叠量时,只需将手指从调节滚轮上移开便可以令牵拉机构固定,此时肌肉折叠量被固定,肌肉折叠量不会随手部力量变化或手部活动而改变,施术者可以专注于缝线操作,既减轻了施术者的操作难度和心理压力,又能够提升手术结果的精确性。
[0025]
二、通过调节滚轮调节肌肉折叠量的方式,对施术者来说具有更加细腻的操作手感,可以非常方便地进行微调,能够使肌肉折叠量达到足够精确的程度,提高施术者的操作信心。
[0026]
三、通过设于握持手柄上的监测机构,可以更方便地在缝线前确定所要达到的肌肉折叠量,也可以在术中随着判断肌肉折叠量是否处于正确的状态,以便进行及时地调整,通过在控制杆上设置刻度板,可以将上斜肌折叠的程度直接转化为可直接观察的数据,可以更方便、更精确地判断肌肉折叠量。
[0027]
四、通过光栅传感器读取与控制杆连接的光栅板,并经过数据处理器的计算,能够将钩住上斜肌的钩体的运动距离(对应上斜肌的折叠量)转化为更加直观的信息显示在显示屏中,如将折叠量信息以数字显示,施术无需花费时间和分散注意力去计算折叠量,且通过光栅传感器计算距离获得肌肉折叠量的方式相对于肉眼直接观察具有更高的准确度。
[0028]
五、由于人体眼部肌肉相对较为敏感脆弱,若由于操作失误导致在牵拉上斜肌时用力过度,可能会使肌肉拉伸量超过自身的承受范围,导致肌肉受到伤害,影响患者的术后恢复,还会在使患者在麻醉效果结束后出现疼痛感,因此通过拉力传感器对肌肉的牵拉力进行检测,并将检测到的压力转化为直观的警示信号显示在显示屏中,一边观察警示信号一边操作折叠上斜肌,避免用力过度。
[0029]
六、在折叠夹夹头端部形成的直型边框中设置穿针孔,目的在于简化、精确化缝线操作,直型钩头勾住上斜肌并达到所需折叠量时,穿针孔正对应缝针位置,且穿针孔完全横跨上斜肌的折叠部位,通过穿针孔进行缝针不仅可以保证缝针位置的准确性,而且可以在一定程度上规避夹头以及直型钩头对穿刺的阻碍。
[0030]
七、直型钩头勾住上斜肌拉至所需折叠量时,施术者可以通过手指控制夹紧机构,以使上斜肌被第一半夹和第二半夹的夹头夹紧,且由于控制钮的弹性复位作用,在上斜肌被夹紧后,即使松开手指也可以保持上斜肌始终处于被夹紧状态,从而保证缝针部位不发生偏离,更方便缝线操作。
附图说明
[0031]
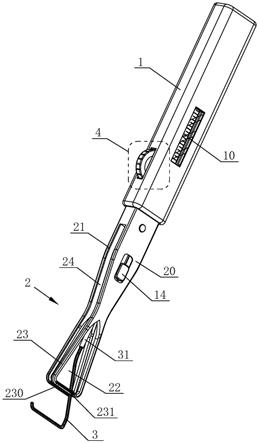
图1为本发明高精确上斜肌折叠缝线辅助器实施例1的结构示意图。
[0032]
图2为实施例1中牵拉机构的结构示意图。
[0033]
图3为实施例1中调控机构的结构示意图。
[0034]
图4和图5为实施例1中牵拉机构的运作方式示意图。
[0035]
图6为实施例1中折叠夹的结构示意图。
[0036]
图7和图8为实施例1中夹紧机构的结构示意图。
[0037]
图9为实施例1中手柄的结构示意图。
[0038]
图10为实施例2中手柄的结构示意图。
[0039]
图11为实施例2中监测机构的结构示意图。
[0040]
图12为实施例3中监测机构的结构示意图。
[0041]
附图标记:1、手柄;10、可视窗口;2、折叠夹;20、第一半夹;21、第二半夹;22、贯穿孔;23、夹头;230、直型边框;231、穿针孔;24、缝隙空间;3、牵拉机构;30、钩体;300、钩身;301、直型钩头;31、控制杆;310、锯齿部;4、调控机构;40、调节滚轮;400、齿轮;41、弹性复位板;42、锁定结构;420、杠杆;421、卡齿;422、活动连接部;4220、活动槽;5、刻度板;6、指针;7、显示屏;8、光栅板;9、光栅传感器;11、数据处理器;12、拉力传感器;13、警示信号;14、控制钮;15、活动卡齿;16、固定卡齿。
具体实施方式
[0042]
下面结合附图对本发明做进一步描述。
[0043]
实施例1:
[0044]
如图1至图9所示的高精确上斜肌折叠缝线辅助器,包括握持手柄1、折叠夹2和牵拉机构3,折叠夹2固定于握持手柄1的其中一端部,折叠夹2包括有相互对称设置的第一半夹20和第二半夹21,第一半夹20和第二半夹21均留有贯穿内外壁的贯穿孔22,第一半夹20和第二半夹21在远离手柄1的一端形成夹头23,夹头23由端部向内逐渐内收变窄,形成类似等腰梯形的形状,贯穿孔22沿着夹头23的轮廓成型,使得夹头23形成宽厚均匀的框状结构,夹头23在端部形成直型边框230,直型边框230贯穿设置有穿针孔231,穿针孔231为沿直型边框230由左向右设置的长直形通孔,穿针孔231的宽度限定为1-3mm,,第一半夹20和第二半夹21之间形成用于牵拉机构3通过的缝隙空间24。
[0045]
牵拉机构3包括控制杆31和用于勾住上斜肌的钩体30,钩体30与控制杆31其中一端一体化成型,控制杆31另一端穿过缝隙空间24进入握持手柄1中,钩体30包括钩身300和直型钩头301,直型钩头301与钩身300一体化成型,直型钩头301远离钩身300的一端端头朝向控制杆31翘起,直型钩头301平行于所述直型边框230设置,控制杆31的轴心所在平面平分直型钩头301,钩身300与控制杆31的轴心之间的夹角为15-60
°
。
[0046]
握持手柄1设有调控机构4和监测机构,其中调控机构4用于控制牵拉机构3的伸缩和锁定,监测机构用于实时获取牵拉机构3的伸缩量,通过所获取的伸缩量数据判断上斜肌的折叠程度。
[0047]
控制杆31在位于握持手柄1内部的部分表面设有锯齿部310,锯齿部310沿着控制杆31表面直线排布,调控机构4包括调节滚轮40、弹性复位板41和锁定结构42,调节滚轮40
连接有齿轮400,齿轮400与调节滚轮40同轴心固定连接,齿轮400可与控制杆31表面的锯齿部310相啮合。
[0048]
调节滚轮40通过活动转轴与握持手柄1内部旋转连接,活动转轴与握持手柄1可相对运动,活动转轴的运动方向垂直于控制杆31,调节滚轮40由握持手柄1向外部分露出,露出的部分可供手指拨动,弹性复位板41包括两个弹簧板,两个弹簧板共同夹住活动转轴,两个弹簧板在两端部固定连接且与握持手柄1相对固定连接,齿轮400在弹性复位板41的弹力作用下处于脱离锯齿部310的状态。
[0049]
锁定结构42包括杠杆420、卡齿421和活动连接部422,杠杆420通过固定转轴连接握持手柄1,卡齿421和活动连接部422分别固定连接于杠杆420两端部,活动连接部422为内部留有活动槽4220的套环结构,套环结构通过活动槽4220套设在活动转轴上,活动槽4220在平行于控制杆31的方向上留有活动空间,活动槽4220在垂直于控制杆31的方向上未留有活动空间,卡齿421朝向锯齿部310设置。
[0050]
调控机构4以如下方式运作:未对调节滚轮40施加外力时,齿轮400由于弹性复位板41的限制处于原位置,此时齿轮400完全脱离锯齿部310,卡齿421嵌入锯齿部310的齿槽中,控制杆31被锁定;手指按压调节滚轮40时,齿轮400与锯齿部310相啮合时,同时卡齿421完全脱离锯齿部310的齿槽,此时可拨动调节滚轮40对控制杆31的伸缩进行调节,调节结束后松开调节滚轮40,齿轮400由于弹性复位板41的弹力作用复位至原位置。
[0051]
监测机构包括有刻度板5和指针6,刻度板5与控制杆31位于握持手柄1中的部分相对固定设置,握持手柄1上设有可视窗口10,指针6位于可视窗口10中,刻度板5朝向可视窗口10设置,对已经勾住上斜肌的牵拉机构3进行调节时,只需观察可视窗口10中的刻度,便可以得知肌肉折叠量。
[0052]
折叠夹2还设有用于使上斜肌被夹紧在第一半夹20和第一半夹21之间的夹紧机构,夹紧机构包括控制钮14、活动卡齿15和固定卡齿16,控制钮14设于第一半夹20的外侧,活动卡齿15由第一半夹20内侧贯穿至外侧并规定连接至控制钮14,固定卡齿16固定设置于第一半夹21的内侧,通过控制钮14控制活动卡齿15和固定卡齿16的咬合和分离,当活动卡齿15和固定卡齿16相互咬合时,第一半夹20和第一半夹21相向夹紧,控制钮14与第一半夹20弹性连接,当控制钮14受到与弹力方向相反的推力时,活动卡齿15趋向于远离固定卡齿16;当控制钮14失去推力时,活动卡齿15趋向于靠近固定卡齿16。
[0053]
夹紧机构以如下方式运作:一个手指按住控制钮14并朝向夹头推动,此时活动卡齿15脱离固定卡齿16,然后配合其他手指施力使得折叠夹2的夹头23夹紧上斜肌,再松开按住控制钮14的手指,控制钮14由于弹性作用复位使活动卡齿15朝向固定卡齿16弹回,最终活动卡齿15与固定卡齿16相咬合,此时,上斜肌被夹紧并固定;需要解除对上斜肌的固定时,只需推动控制钮14使得活动卡齿15脱离固定卡齿16即可。
[0054]
实施例2:
[0055]
如图10和图11所示,本实施例基于实施例1所述的技术方案,本实施例与实施例1的区别技术点在于:
[0056]
本方案中的监测机构包括有显示屏7、光栅板8、光栅传感器9、数据处理器11和供电器,显示屏7设于握持手柄1表面,光栅板8与控制杆31位于握持手柄1中的部分相对固定设置,光栅传感器9设于光栅板8的运动路径上,光栅传感器9、芯片和供电器均内置于握持
手柄1内部,显示屏7、光栅传感器9、供电器均与数据处理器11电连接。光栅传感器9可以读取光栅板8进行精确的位移量测量,并将信号传输给数据处理器11,经过数据处理器11的计算,将所测位移量(对应上斜肌的折叠量)转化为更加直观的数字或图像信息显示在显示屏7中。
[0057]
实施例3:
[0058]
如图12所示,本实施例基于实施例2所述的技术方案,本实施例与实施例2的区别技术点在于:
[0059]
监测机构还包括有拉力传感器12,拉力传感器12内置于握持手柄1中,拉力传感器12的感应端连接控制杆31,且拉力传感器12与数据处理器11电连接,通过拉力传感器12对肌肉的牵拉力进行检测,并将检测到的压力转化为直观的警示信号13显示在显示屏7中,警示信号13为多个并排设置的竖条,竖条由下至上逐渐边长,竖条平时处于非亮或低亮状态,检测到的压力越大,亮起的竖条越多,竖条时由下至上依次亮起,书中可以一边观察警示信号13一边操作折叠上斜肌,避免用力过度。
[0060]
以上所述的技术方案是本发明的优选实施方式,对于本领域的普通技术人员来说不脱离本发明原理的前提下,还可以做出若干变型和改进,这些也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1