用于手术机器人的器械驱动器和手术机器人的制作方法
本发明总地涉及手术机器人领域,具体而言涉及一种用于手术机器人的器械驱动器和手术机器人。
背景技术:
1、医疗手术机器人具有定位准确、运行稳定、灵巧性强、工作范围大、不怕辐射和感染等优点,广泛的应用于各种手术中。医疗手术机器人的使用有助于提高外科医生手术的精度,解决外科医生手部的颤抖、疲劳、肌肉神经的反馈,能够使医生在最舒适的状态下进行手术操作,对于提高手术成功率、减轻患者痛苦具有重要价值,近年来其研究已经成为医疗器械应用的新领域。
2、手术机器人通常在其一个或多个机械臂末端布置手术器械驱动装置,以适应在不同手术类型和整个手术期间需要更换和适配多种手术器械来完成手术过程中的各种动作的需求。
3、为了对手术器械工具末端执行器实现准确的、安全的、高响应的控制,需要对动力单元进行传感检测,以便确认电机转子位置和驱动输出装置末端的位置,来实现闭环控制。
4、现有技术在测量驱动装置末端旋转副的位置时,需要在齿轮箱最后一级输出盘外侧加工齿形,且需要在减速箱外壁上开一个缺口,同时在与驱动盘平行轴线的位置布置一个啮合外齿轮和霍尔敏感单元联动轴系,这样会造成以下几个问题:
5、1、零部件多,安装较复杂;
6、2、一对齿轮啮合副,必然会存在传动背隙无法彻底消除的情况,给末端输出装置的准确位置测量带来一个误差项;
7、3、测量单元离真正需要被检测的驱动盘单元较远,驱动盘到减速箱最后一级输出件之间的刚度变形无法包含在测量之中,带来测量精度的进一步降低。
8、因此,需要一种用于手术机器人的器械驱动器以至少部分地解决上述问题。
技术实现思路
1、在
技术实现要素:
部分中引入了一系列简化形式的概念,这将在具体实施方式部分中进一步详细说明。本发明的发明内容部分并不意味着要试图限定出所要求保护的技术方案的关键特征和必要技术特征,更不意味着试图确定所要求保护的技术方案的保护范围。
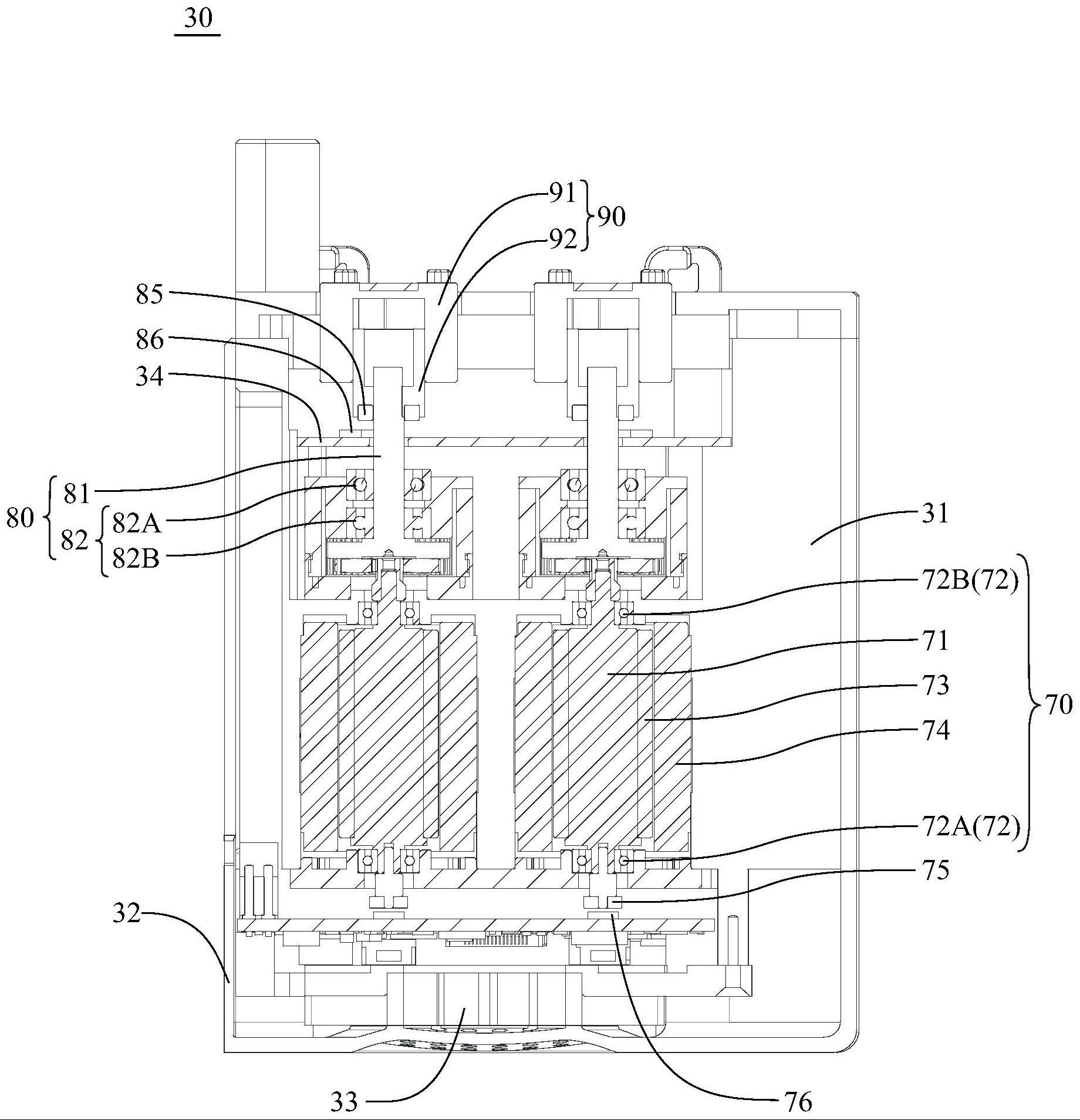
2、为了至少部分地解决上述问题,本发明的第一方面提供了一种用于手术机器人的器械驱动器,所述器械驱动器包括若干个电机、减速箱、减速箱输出级和驱动盘组件,所述电机驱动所述减速箱带动所述减速箱输出级转动,进而所述减速箱驱动所述驱动盘组件转动,所述器械驱动器还包括:
3、输出级磁环,所述输出级磁环与减速箱输出级同轴布置,并随所述减速箱输出级同步转动;
4、输出级编码器,所述输出级编码器固定布置在所述减速箱输出级的径向方向,用于检测所述输出级磁环的转动。
5、根据本发明的用于手术机器人的器械驱动器,在减速箱输出级的同轴线方向布置了输出级磁环,在其径向布置了输出级编码器,这样使得驱动盘的旋转位置检测在不到4.5mm的轴向高度和减速箱中心轴线径向7.5mm空间即可以实现。这简化了器械驱动器内部的结构,同时极大节省了器械驱动器的内部空间,使器械驱动器的外形尺寸更小,手术机器人的结构更优。并且,本发明能够排除结构复杂带来的间隙或变形等误差,能够直接测量输出级的转动角度,对输出级转动角度的测量更为精确,对末端器械的控制精度更高。
6、可选地,所述器械驱动器还包括输出传感板,所述输出传感板设置在所述减速箱输出级的轴承和所述驱动盘组件之间,所述输出传感板设置有用于使所述减速箱输出级穿过的通孔,其中,
7、所述输出级编码器安装至所述输出传感板。
8、根据本发明的用于手术机器人的器械驱动器,输出级编码器安装在驱动盘组件与减速箱输出级的轴承之间。
9、可选地,所述输出级磁环安装至所述驱动盘组件,所述输出级编码器安装至所述输出传感板的朝向所述驱动盘组件的一侧。
10、根据本发明的用于手术机器人的器械驱动器,输出级编码器可以位于输出级磁环的下方。
11、可选地,所述驱动盘组件包括驱动盘导向部和驱动盘,所述驱动盘导向部与所述减速箱输出级的轴部耦接,所述驱动盘与所述驱动盘导向部滑动配合,所述输出级磁环耦接于所述驱动盘导向部。
12、根据本发明的用于手术机器人的器械驱动器,输出级磁环直接安装至输出盘导向部,简化了器械驱动器的内部结构。
13、可选地,所述驱动盘和所述驱动盘导向部由非磁性材料或弱磁性材料制成。
14、根据本发明的用于手术机器人的器械驱动器,靠近输出级磁环的材料皆为非磁性材料或弱磁性材料,避免这些材料本身被磁化以致对编码器测量精度和准确性产生影响,极大提升了测量的准确度和精度。
15、可选地,所述输出级磁环安装至所述减速箱的输出级并且靠近所述减速箱输出级的轴承,所述输出级编码器安装至所述输出传感板的朝向所述减速箱输出级的轴承的一侧。
16、根据本发明的用于手术机器人的器械驱动器,输出级编码器可以位于输出级磁环的上方。
17、可选地,所述减速箱输出级的轴承包括外轴承和内轴承,所述输出级磁环靠近所述外轴承。
18、根据本发明的用于手术机器人的器械驱动器,减速箱轴系中采用了双轴承设计,可以减小输出级轴本身的轴向窜动对于传感器测量的影响,降低了由于磁环上下移动带来的传感器测量误差。
19、可选地,所述外轴承与所述内轴承跨距设置,或者所述外轴承与所述内轴承紧挨设置。
20、根据本发明的用于手术机器人的器械驱动器,减速箱轴系中的双轴承可根据器械驱动器内实际空间的大小调整两者间的距离。
21、可选地,所述外轴承由非磁性材料或弱磁性材料制成。
22、根据本发明的用于手术机器人的器械驱动器,靠近输出级磁环的材料皆为非磁性材料或弱磁性材料,避免这些材料本身被磁化以致对编码器测量精度和准确性产生影响,极大提升了测量的准确度和精度。
23、可选地,所述输出级编码器位于多个所述减速箱输出级的中心的连线构成的凸多边形的外侧。
24、根据本发明的用于手术机器人的器械驱动器,最大化减小各个编码器单元互相干扰的影响。
25、可选地,所述减速箱包括顶盖,所述顶盖由非磁性材料或弱磁性材料制成。
26、可选地,所述减速箱输出级由非磁性材料或弱磁性材料制成。
27、根据本发明的用于手术机器人的器械驱动器,靠近输出级磁环的材料皆为非磁性材料或弱磁性材料,避免这些材料本身被磁化以致对编码器测量精度和准确性产生影响,极大提升了测量的准确度和精度。
28、可选地,所述电机的轴承包括输入端轴承和输出端轴承。
29、根据本发明的用于手术机器人的器械驱动器,电机轴系中采用了双轴承设计,可以减小电机轴本身的轴向窜动对于传感器测量的影响,降低了由于磁环上下移动带来的传感器测量误差。
30、可选地,所述输入端轴承由非磁性材料或弱磁性材料制成。
31、根据本发明的用于手术机器人的器械驱动器,靠近输入级磁环的材料皆为非磁性材料或弱磁性材料,避免这些材料本身被磁化以致对编码器测量精度和准确性产生影响,极大提升了测量的准确度和精度。
32、可选地,所述器械驱动器还包括:
33、输入级磁环,所述输入级磁环与所述电机的输入级同轴布置,并随所述电机的输入级同步转动;
34、输入级编码器,所述输入级编码器固定布置在所述器械驱动器中,用于检测所述输入级磁环的转动。
35、根据本发明的用于手术机器人的器械驱动器,实现了一套电机输入端和减速箱输出端紧凑的转动检测方案,可以将输出级编码检测单元的检测值与输入级编码检测单元的检测值进行比对,然后可以通过软件控制来补偿输出级可能产生的误差,因而器械驱动器的控制精度更高。
36、可选地,所述输入级磁环与所述输入级编码器的敏感单元同轴布置。
37、根据本发明的用于手术机器人的器械驱动器,将输入级磁环与输入级编码器的敏感单元同轴布置,可以提升对电机输入端转动角度检测的准确性。
38、可选地,所述电机包括底盖,所述底盖由非磁性材料或弱磁性材料制成;并且/或者
39、所述电机包括基座,所述基座由非磁性材料或弱磁性材料制成;并且/或者
40、所述电机包括外壳,所述外壳由非磁性材料或弱磁性材料制成。
41、根据本发明的用于手术机器人的器械驱动器,靠近输入级磁环的材料皆为非磁性材料或弱磁性材料,避免这些材料本身被磁化以致对编码器测量精度和准确性产生影响,极大提升了测量的准确度和精度。
42、本发明的第二方面提供了一种手术机器人,其包括上述的用于手术机器人的器械驱动器。
43、根据本发明的手术机器人,在器械驱动器的减速箱输出级的同轴线方向布置了输出级磁环,在其径向布置了输出级编码器,这样使得驱动盘的旋转位置检测在不到4.5mm的轴向高度和减速箱中心轴线径向7.5mm空间即可以实现。这简化了器械驱动器内部的结构,同时极大节省了器械驱动器的内部空间,使器械驱动器的外形尺寸更小,手术机器人的结构更优。并且,本发明能够排除结构复杂带来的间隙或变形等误差,能够直接测量输出级的转动角度,对输出级转动角度的测量更为精确,对末端器械的控制精度更高。
- 还没有人留言评论。精彩留言会获得点赞!