一种甲状腺扫查方法及系统与流程
1.本发明涉及超声扫查技术领域,具体涉及一种甲状腺扫查方法及系统。
背景技术:
2.国内医疗产业高速发展,医疗技术突飞猛进的同时,区域间医疗资源不平衡的状况依然严重。基层医疗能力弱、条件差,医疗专家资源匮乏,先进医疗设备缺失,无法满足广大农村地区的医疗需求。技术的发展成为行业问题的突破口,掌上超声终端,通过尖端超声波扫描设备进行连接,可以即时检测皮下人体组织的实际情况,整个流程方便快捷,为医护人员精准诊断病人的实际状况提供有效支持。目前,很多基层医院缺少超声科与临床科结合的专业医生,基层医院的扫图员在进行超声扫查时往往不知道每一步扫查应该如何完成,如何进入下一步,且无法准确快速操作超声探头,完全依靠经验进行超声扫查,但基层医院的扫图员通常缺乏相关的经验。
3.现有技术中,大部分都是根据相关图像算法,或按照某一固定扫查路径对扫查对象进行甲状腺扫查。由于每个人的头部和颈部轮廓的差异,甲状腺位置的差异,当机械臂按照一固定方向或路径进行扫查,难免会有一些人的甲状腺会扫查不全或扫查位置不正确,导致对于这些病人的病症诊断,可能会被漏诊或误判。
技术实现要素:
4.针对现有技术中存在的上述问题,现提供一种甲状腺扫查方法。
5.具体技术方案如下:
6.一种甲状腺扫查方法,适用于一甲状腺扫查系统,所述甲状腺扫查系统通过一视觉摄像机采集患者图像,并控制一具有探头的机械臂根据所述甲状腺扫查方法进行扫查;
7.则所述甲状腺扫查方法具体包括:
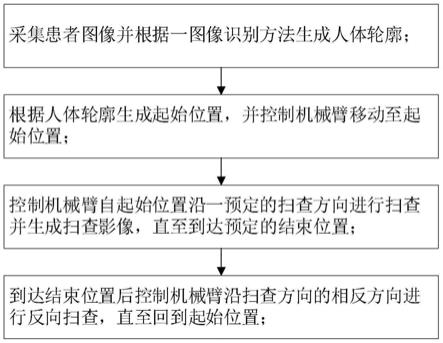
8.采集所述患者图像并根据一图像识别方法生成人体轮廓;
9.根据所述人体轮廓生成起始位置,并控制所述机械臂移动至起始位置;
10.控制所述机械臂自所述起始位置沿一预定的扫查方向进行扫查并生成扫查影像,直至到达预定的结束位置;
11.到达结束位置后控制所述机械臂沿所述扫查方向的相反方向进行反向扫查,直至回到所述起始位置;
12.在扫查过程中采用一甲状腺部位识别模型对所述扫查影像进行识别,判断是否扫查到相应的甲状腺部位并生成部位识别结果;
13.所述部位识别结果用于在没有扫查到对应的所述甲状腺部位时调整所述起始位置。
14.优选地,甲状腺扫查方法还包括:
15.在扫查过程中采用一甲状腺轮廓识别模型对所述扫查影像进行识别,以生成甲状腺轮廓,所述甲状腺轮廓用于生成所述起始位置;
16.在扫查过程中采用一结节识别模型对所述扫查影像进行识别,判断所述扫查影像中是否存在结节;
17.当所述扫查影像中存在结节时,采用一重点扫查方法控制所述机械臂对所述结节进行扫查。
18.优选地,所述甲状腺扫查方法还包括:
19.步骤a1:对患者的峡部进行扫查;
20.步骤a2:对所述患者的颈部以左侧横切方法进行扫查;
21.步骤a3:对所述患者的颈部以左侧纵切方法进行扫查;
22.步骤a4:对所述患者的颈部以右侧横切方法进行扫查;
23.步骤a5:对所述患者的颈部以右侧纵切方法进行扫查;
24.步骤a6:采用所述甲状腺轮廓识别模型对所述扫查影像进行识别,生成甲状腺轮廓,根据所述甲状腺轮廓是否完整判断扫查是否完成;
25.若是,结束扫查;
26.若否,返回所述步骤a1;
27.优选地,所述步骤a1包括:
28.步骤a11:采集所述患者图像并生成所述甲状腺的峡部的起始位置;
29.步骤a12:控制所述机械臂移动至所述甲状腺的峡部的第一起始位置,并下降所述探头至患者体表;
30.步骤a13:沿预定的第一方向移动所述探头,并采集所述扫查影像;
31.步骤a14:采集所述患者图像,判断所述探头是否达到所述甲状腺的峡部的结束位置;
32.若是,转向步骤a15;
33.若否,返回所述步骤a13;
34.步骤a15:采用所述甲状腺部位识别模型判断所述扫查影像中是否存在甲状腺的峡部;
35.若是,转向步骤a17;
36.若否,转向步骤a16;
37.步骤a16:采用一调整方法对所述甲状腺的峡部的起始位置进行调整,生成新的甲状腺的峡部的起始位置,随后返回所述步骤a12;
38.步骤a17:从所述所述甲状腺的峡部的结束位置沿所述第一方向的相反方向移动所述探头,并采集所述扫查影像,直至所述探头回到所述甲状腺的峡部的起始位置;
39.所述步骤a15和所述a17中还包括采用所述结节识别模型判断所述扫查影像中是否存在所述结节,并在所述扫查影像中存在所述结节时,采用所述重点扫查方法控制所述机械臂对所述结节进行扫查。
40.优选地,所述步骤a2包括:
41.步骤a21:根据所述甲状腺的峡部的起始位置沿第一调整方向移动第一距离以生成所述甲状腺的左侧横切的起始位置;
42.步骤a22:控制所述机械臂移动至所述甲状腺的左侧横切的起始位置,并下降所述探头至患者体表;
43.步骤a23:沿预定的第一方向移动所述探头,并采集所述扫查影像;
44.步骤a24:采集所述患者图像,判断所述探头是否达到甲状腺的左侧横切的结束位置;
45.若是,转向步骤a25;
46.若否,返回所述步骤a23;
47.步骤a25:采用所述甲状腺部位识别模型判断所述扫查影像中是否存在甲状腺的左侧横切部;
48.若是,采用所述甲状腺轮廓识别模型对所述扫查影像进行识别,并将所述扫查影像中的甲状腺轮廓起始点记作左侧第一节点,将所述扫查影像中的甲状腺轮廓结束点记作左侧第二节点,随后转向步骤a27;
49.若否,转向步骤a26;
50.步骤a26:采用一调整方法对所述甲状腺的左侧横切的起始位置进行调整,生成新的甲状腺的左侧横切的起始位置,随后返回所述步骤a22;
51.步骤a27:从所述甲状腺的左侧横切的结束位置沿所述第一方向的相反方向移动所述探头,并采集所述扫查影像,直至所述探头回到所述第一起始位置;
52.所述步骤a25和所述a27中还包括采用所述结节识别模型判断所述扫查影像中是否存在所述结节,并在所述扫查影像中存在所述结节时,采用所述重点扫查方法控制所述机械臂对所述结节进行扫查。
53.优选地,所述步骤a3包括:
54.步骤a31:根据所述左侧第一节点和所述左侧第二节点生成甲状腺的左侧纵切的起始位置;
55.步骤a32:控制所述机械臂移动至所述甲状腺的左侧纵切的起始位置,并下降所述探头至患者体表;
56.步骤a33:沿预定的第二方向移动所述探头,并采集所述扫查影像;
57.步骤a34:采集所述患者图像,判断所述探头是否达到甲状腺的左侧纵切的结束位置;
58.若是,转向步骤a35;
59.若否,返回所述步骤a33;
60.步骤a35:采用所述甲状腺部位识别模型判断所述扫查影像中是否存在甲状腺的左侧纵切部;
61.若是,转向步骤a37;
62.若否,转向步骤a36;
63.步骤a36:采用一调整方法对所述甲状腺的左侧纵切的起始位置进行调整,生成新的甲状腺的左侧纵切的起始位置,随后返回所述步骤a32;
64.步骤a37:从所述甲状腺的左侧纵切的结束位置沿所述第二方向的相反方向移动所述探头,并采集所述扫查影像,直至所述探头回到所述第一起始位置;
65.所述步骤a35和所述a37中还包括采用所述结节识别模型判断所述扫查影像中是否存在所述结节,并在所述扫查影像中存在所述结节时,采用所述重点扫查方法控制所述机械臂对所述结节进行扫查。
66.优选地,所述步骤a4包括:
67.步骤a41:根据所述甲状腺的峡部的起始位置沿第二调整方向移动第一距离以生成甲状腺的右侧纵切的起始位置;
68.步骤a42:控制所述机械臂移动至所述甲状腺的右侧纵切的起始位置,并下降所述探头至患者体表;
69.步骤a43:沿预定的第一方向移动所述探头,并采集所述扫查影像;
70.步骤a44:采集所述患者图像,判断所述探头是否达到甲状腺的右侧纵切的结束位置;
71.若是,转向步骤a45;
72.若否,返回所述步骤a43;
73.步骤a45:采用所述甲状腺部位识别模型判断所述扫查影像中是否存在甲状腺的右侧横切部;
74.若是,采用所述甲状腺轮廓识别模型对所述扫查影像进行识别,并将所述扫查影像中的甲状腺轮廓起始点记作右侧第一节点,将所述扫查影像中的甲状腺轮廓结束点记作右侧第二节点,随后转向步骤a47;
75.若否,转向步骤a46;
76.步骤a46:采用一调整方法对所述甲状腺的右侧纵切的起始位置进行调整,生成新的甲状腺的右侧纵切的起始位置,随后返回所述步骤a42;
77.步骤a47:从所述甲状腺的右侧纵切的结束位置沿所述第一方向的相反方向移动所述探头,并采集所述扫查影像,直至所述探头回到所述甲状腺的右侧纵切的起始位置;
78.所述步骤a45和所述a47中还包括采用所述结节识别模型判断所述扫查影像中是否存在所述结节,并在所述扫查影像中存在所述结节时,采用所述重点扫查方法控制所述机械臂对所述结节进行扫查。
79.优选地,所述步骤a5包括:
80.步骤a51:根据所述右侧第一节点和所述右侧第二节点生成甲状腺的右侧横切的起始位置;
81.步骤a52:控制所述机械臂移动至所述甲状腺的右侧横切的起始位置,并下降所述探头至患者体表;
82.步骤a53:沿预定的第三方向移动所述探头,并采集所述扫查影像;
83.步骤a54:采集所述患者图像,判断所述探头是否达到甲状腺的右侧横切的结束位置;
84.若是,转向步骤a55;
85.若否,返回所述步骤a53;
86.步骤a55:采用所述甲状腺部位识别模型判断所述扫查影像中是否存在甲状腺的左侧纵切部;
87.若是,转向步骤a57;
88.若否,转向步骤a56;
89.步骤a56:采用一调整方法对所述甲状腺的右侧横切的起始位置进行调整,生成新的甲状腺的右侧横切的起始位置,随后返回所述步骤a52;
90.步骤a57:从所述甲状腺的右侧横切的结束位置沿所述第三方向的相反方向移动所述探头,并采集所述扫查影像,直至所述探头回到所述甲状腺的右侧横切的起始位置;
91.所述步骤a55和所述a57中还包括采用所述结节识别模型判断所述扫查影像中是否存在所述结节,并在所述扫查影像中存在所述结节时,采用所述重点扫查方法控制所述机械臂对所述结节进行扫查。
92.优选地,所述重点扫查方法包括:转动所述探头,使得所述探头与所述颈部表面的夹角依次调整为90度、80度、90度、100度、90度。
93.一种甲状腺扫查系统,包括:
94.处理器与存储器,所述存储器中存储有计算机指令;
95.视觉摄像机,所述视觉摄像机获取患者图像并将所述患者图像发送至所述处理器;
96.机械臂,所述机械臂的前端设置有一扫查探头,所述扫查探头获取超声影像并传输至所述处理器;
97.所述机械臂于所述处理器的控制下移动所述扫查探头;
98.所述处理器运行所述计算机指令以执行上述的甲状腺扫查方法,以根据所述患者图像和所述超声影像完成扫查过程。
99.上述技术方案具有如下优点或有益效果:采用多个识别模型分别对甲状腺的整体轮廓、甲状腺的部位以及结节进行识别,有效判断出扫查影像中的各个部分,并根据识别结果有效控制机械臂到达所需要扫查的部位,以此提高扫查的效率。
附图说明
100.参考所附附图,以更加充分的描述本发明的实施例。然而,所附附图仅用于说明和阐述,并不构成对本发明范围的限制。
101.图1为本发明实施例的整体示意图;
102.图2为本发明实施例的扫查顺序示意图;
103.图3为本发明实施例的步骤a1子步骤示意图;
104.图4为本发明实施例的步骤a2子步骤示意图;
105.图5为本发明实施例的步骤a3子步骤示意图;
106.图6为本发明实施例的步骤a4子步骤示意图;
107.图7为本发明实施例的步骤a5子步骤示意图。
具体实施方式
108.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
109.需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
110.下面结合附图和具体实施例对本发明作进一步说明,但不作为本发明的限定。
111.本发明包括:
112.一种甲状腺扫查方法,适用于一甲状腺扫查系统,甲状腺扫查系统通过一视觉摄像机采集患者图像,并控制一具有探头的机械臂根据甲状腺扫查方法进行扫查;
113.则甲状腺扫查方法具体包括:
114.采集患者图像并根据一图像识别方法生成人体轮廓;
115.根据人体轮廓生成起始位置,并控制机械臂移动至起始位置;
116.控制机械臂自起始位置沿一预定的扫查方向进行扫查并生成扫查影像,直至到达预定的结束位置;
117.到达结束位置后控制机械臂沿扫查方向的相反方向进行反向扫查,直至回到起始位置;
118.在扫查过程中采用一甲状腺部位识别模型对扫查影像进行识别,判断是否扫查到相应的甲状腺部位并生成部位识别结果;
119.部位识别结果用于在没有扫查到对应的甲状腺部位时调整起始位置。
120.具体地,本技术方案中所述的扫查系统为超声波扫查系统,其在实施时可以采用现有技术中的超声波扫查探头以获得相应的扫查影像。扫查影像在实施过程中可以是由超声波扫查系统生成的单幅扫查影像,也可以是对单个部位进行扫查流程中生成的连续扫查影像,或是整体扫查流程生成的扫查影像。根据部位的不同,扫查方向可以调整为:沿患者锁骨方向指向患者下巴、自患者侧面沿患者体表旋转至中轴部位等。扫查方向在下文中可能表述为“向上”、“向下”、“从左往右”、“从右往左”等具有方向性的表述,其仅是为清楚表示本技术方案的实施过程,并不构成对技术方案的限制。
121.在一种较优的实施例中,甲状腺扫查方法还包括:
122.在扫查过程中采用一甲状腺轮廓识别模型对扫查影像进行识别,以生成甲状腺轮廓,甲状腺轮廓用于生成起始位置;
123.在扫查过程中采用一结节识别模型对扫查影像进行识别,判断扫查影像中是否存在结节;
124.当扫查影像中存在结节时,采用一重点扫查方法控制机械臂对结节进行扫查。
125.进一步地,现有技术中针对甲状腺疾病的患者进行的超声扫查,通常是由人工进行或由机械扫描装置基于简单的预设扫查方向进行相应的扫查流程。由人工进行扫查的过程通常耗时较长,且依赖于医师的经验。而机械扫描装置则通常仅能够进行简单的方向设置,不具备根据患者的人体轮廓、甲状腺的位置进行自主调整的功能。上述问题极大地影响了甲状腺扫查的效率。针对上述技术问题,本技术方案提供了一种基于识别模型进行的扫查方法。其主要技术特征在于:对患者进行图像采集以确定机械臂的移动范围,以及根据甲状腺轮廓识别模型、甲状腺部位识别模型进行机械臂的调整以实现较为准确的扫查定位。同时,当扫查到结节时,由于结节作为甲状腺疾病的重要症状,本技术方案还提供了在扫查过程中同步进行地、对结节进行同步扫查的方法,以此形成较为清晰的结节影像。
126.在一种较优的实施例中,甲状腺扫查方法还包括:
127.步骤a1:对患者的峡部进行扫查;
128.步骤a2:对患者的颈部以左侧横切方法进行扫查;
129.步骤a3:对患者的颈部以左侧纵切方法进行扫查;
130.步骤a4:对患者的颈部以右侧横切方法进行扫查;
131.步骤a5:对患者的颈部以右侧纵切方法进行扫查;
132.步骤a6:采用甲状腺轮廓识别模型对扫查影像进行识别,生成甲状腺轮廓,根据甲状腺轮廓是否完整判断扫查是否完成;
133.若是,结束扫查;
134.若否,返回步骤a1。
135.具体地,在本技术方案中,对甲状腺的扫查顺序遵循峡部-左侧横切-左侧纵切-右侧横切-右侧纵切的顺序进行。当扫查流程结束时,对扫查影像进行拼合并采用甲状腺轮廓识别模型可以有效判断出甲状腺的轮廓是否完整,进而判断出扫查部位是否全面、是否存在遗漏的情况,以实现较好的扫查效果。在实施过程中,也可以采用甲状腺轮廓识别模型在各个部位的扫查过程中判断甲状腺的扫查完整性,以便于及时调整扫查位置获取更优的扫查影像。
136.在一种较优的实施例中,步骤a1包括:
137.步骤a11:采集患者图像并生成甲状腺的峡部的起始位置;
138.步骤a12:控制机械臂移动至甲状腺的峡部的第一起始位置,并下降探头至患者体表;
139.步骤a13:沿预定的第一方向移动探头,并采集扫查影像;
140.步骤a14:采集患者图像,判断探头是否达到甲状腺的峡部的结束位置;
141.若是,转向步骤a15;
142.若否,返回步骤a13;
143.步骤a15:采用甲状腺部位识别模型判断扫查影像中是否存在甲状腺的峡部;
144.若是,转向步骤a17;
145.若否,转向步骤a16;
146.步骤a16:采用一调整方法对甲状腺的峡部的起始位置进行调整,生成新的甲状腺的峡部的起始位置,随后返回步骤a12;
147.步骤a17:从甲状腺的峡部的结束位置沿第一方向的相反方向移动探头,并采集扫查影像,直至探头回到甲状腺的峡部的起始位置;
148.步骤a15和a17中还包括采用结节识别模型判断扫查影像中是否存在结节,并在扫查影像中存在结节时,采用重点扫查方法控制机械臂对结节进行扫查。
149.具体地,在该实施例中,第一起始位置为患者正面锁骨连线与颈部交界处,第一方向指自患者的锁骨沿患者体表向上移动至患者的下巴。当探头接近患者的下巴时,该位置为第一结束位置,第一方向的相反方向则指自患者的下巴沿体表方向向下移动至患者的锁骨连线中心点处。
150.作为可选的实施方式,探头在移动过程中时刻采集探头表面的压力值,通过调整机械臂相对于患者体表的距离以使得探头的压力值大于一预设的压力门限值,以此使得探头紧贴患者体表,获得较好的成像效果。
151.作为可选的实施方式,调整方法包括:对调整次数进行计数,生成调整次数,以第一次扫查过程中的起始位置为参考位置,沿扫查方向的垂直方向,依次调整为:向左0.5厘米、向右0.5厘米、向左1厘米、向右1厘米以生成新的起始位置,以此来实现较好的扫查效
果。
152.在一种较优的实施例中,步骤a2包括:
153.步骤a21:根据甲状腺的峡部的起始位置沿第一调整方向移动第一距离以生成甲状腺的左侧横切的起始位置;
154.步骤a22:控制机械臂移动至甲状腺的左侧横切的起始位置,并下降探头至患者体表;
155.步骤a23:沿预定的第一方向移动探头,并采集扫查影像;
156.步骤a24:采集患者图像,判断探头是否达到甲状腺的左侧横切的结束位置;
157.若是,转向步骤a25;
158.若否,返回步骤a23;
159.步骤a25:采用甲状腺部位识别模型判断扫查影像中是否存在甲状腺的左侧横切部;
160.若是,采用甲状腺轮廓识别模型对扫查影像进行识别,并将扫查影像中的甲状腺轮廓起始点记作左侧第一节点,将扫查影像中的甲状腺轮廓结束点记作左侧第二节点,随后转向步骤a27;
161.若否,转向步骤a26;
162.步骤a26:采用一调整方法对甲状腺的左侧横切的起始位置进行调整,生成新的甲状腺的左侧横切的起始位置,随后返回步骤a22;
163.步骤a27:从甲状腺的左侧横切的结束位置沿第一方向的相反方向移动探头,并采集扫查影像,直至探头回到第一起始位置;
164.步骤a25和a27中还包括采用结节识别模型判断扫查影像中是否存在结节,并在扫查影像中存在结节时,采用重点扫查方法控制机械臂对结节进行扫查。
165.在一种较优的实施例中,步骤a3包括:
166.步骤a31:根据左侧第一节点和左侧第二节点生成甲状腺的左侧纵切的起始位置;
167.具体地,甲状腺的左侧横切的起始位置的生成方法为,记录左侧第一节点和左侧第二节点,将左侧第一节点和左侧第二节点的连线中心点作为左侧基准位置,首先将探头移动至该左侧基准位置,此时将机械臂沿颈部轮廓向下旋转90度,当探头位置与床面保持水平时停止,此时探头所在的位置即为甲状腺的左侧横切的起始位置。
168.步骤a32:控制机械臂移动至甲状腺的左侧纵切的起始位置,并下降探头至患者体表;
169.步骤a33:沿预定的第二方向移动探头,并采集扫查影像;
170.具体地,第二方向指自患者左侧沿体表向患者颈部中轴线移动,甲状腺的左侧纵切的结束位置位置指沿该第二方向进行移动,直至达到患者颈部的中轴线。
171.步骤a34:采集患者图像,判断探头是否达到甲状腺的左侧纵切的结束位置;
172.若是,转向步骤a35;
173.若否,返回步骤a33;
174.步骤a35:采用甲状腺部位识别模型判断扫查影像中是否存在甲状腺的左侧纵切部;
175.若是,转向步骤a37;
176.若否,转向步骤a36;
177.步骤a36:采用一调整方法对甲状腺的左侧纵切的起始位置进行调整,生成新的甲状腺的左侧纵切的起始位置,随后返回步骤a32;
178.步骤a37:从甲状腺的左侧纵切的结束位置沿第二方向的相反方向移动探头,并采集扫查影像,直至探头回到甲状腺的左侧纵切的起始位置;
179.步骤a35和a37中还包括采用结节识别模型判断扫查影像中是否存在结节,并在扫查影像中存在结节时,采用重点扫查方法控制机械臂对结节进行扫查。
180.在一种较优的实施例中,步骤a4包括:
181.步骤a41:根据甲状腺的峡部的起始位置沿第二调整方向移动第一距离以生成甲状腺的右侧纵切的起始位置;
182.步骤a42:控制机械臂移动至甲状腺的右侧纵切的起始位置,并下降探头至患者体表;
183.步骤a43:沿预定的第一方向移动探头,并采集扫查影像;
184.步骤a44:采集患者图像,判断探头是否达到甲状腺的右侧纵切的结束位置;
185.若是,转向步骤a45;
186.若否,返回步骤a43;
187.步骤a45:采用甲状腺部位识别模型判断扫查影像中是否存在甲状腺的右侧横切部;
188.若是,采用甲状腺轮廓识别模型对扫查影像进行识别,并将扫查影像中的甲状腺轮廓起始点记作右侧第一节点,将扫查影像中的甲状腺轮廓结束点记作右侧第二节点,随后转向步骤a47;
189.若否,转向步骤a46;
190.步骤a46:采用一调整方法对甲状腺的右侧纵切的起始位置进行调整,生成新的甲状腺的右侧纵切的起始位置,随后返回步骤a42;
191.步骤a47:从甲状腺的右侧纵切的结束位置沿第一方向的相反方向移动探头,并采集扫查影像,直至探头回到甲状腺的右侧纵切的起始位置;
192.步骤a45和a47中还包括采用结节识别模型判断扫查影像中是否存在结节,并在扫查影像中存在结节时,采用重点扫查方法控制机械臂对结节进行扫查。
193.在一种较优的实施例中,步骤a5包括:
194.步骤a51:根据右侧第一节点和右侧第二节点生成甲状腺的右侧横切的起始位置;
195.具体地,甲状腺的右侧横切的起始位置的生成方法为,记录右侧第一节点和右侧第二节点,将右侧第一节点和右侧第二节点的连线中心点作为右侧基准位置,首先将探头移动至该右侧基准位置,此时将机械臂沿颈部轮廓向下旋转90度,当探头位置与床面保持水平时停止,此时探头所在的位置即为甲状腺的右侧横切的起始位置。
196.步骤a52:控制机械臂移动至甲状腺的右侧横切的起始位置,并下降探头至患者体表;
197.步骤a53:沿预定的第三方向移动探头,并采集扫查影像;
198.具体地,第三方向指自患者右侧沿体表向患者颈部中轴线移动,甲状腺的右侧横切的结束位置位置指沿该方向进行移动,直至达到患者颈部的中轴线。
199.步骤a54:采集患者图像,判断探头是否达到甲状腺的右侧横切的结束位置;
200.若是,转向步骤a55;
201.若否,返回步骤a53;
202.步骤a55:采用甲状腺部位识别模型判断扫查影像中是否存在甲状腺的左侧纵切部;
203.若是,转向步骤a57;
204.若否,转向步骤a56;
205.步骤a56:采用一调整方法对甲状腺的右侧横切的起始位置进行调整,生成新的甲状腺的右侧横切的起始位置,随后返回步骤a52;
206.步骤a57:从甲状腺的右侧横切的结束位置沿第三方向的相反方向移动探头,并采集扫查影像,直至探头回到甲状腺的右侧横切的起始位置;
207.步骤a55和a57中还包括采用结节识别模型判断扫查影像中是否存在结节,并在扫查影像中存在结节时,采用重点扫查方法控制机械臂对结节进行扫查。在一种较优的实施例中,重点扫查方法包括:转动探头,使得探头与颈部表面的夹角依次调整为90度、80度、90度、100度、90度。
208.一种甲状腺扫查系统,包括:
209.处理器与存储器,存储器中存储有计算机指令;
210.视觉摄像机,视觉摄像机获取患者图像并将患者图像发送至处理器;
211.机械臂,机械臂的前端设置有一扫查探头,扫查探头获取超声影像并传输至处理器;
212.机械臂于处理器的控制下移动扫查探头;
213.处理器运行计算机指令以执行上述的甲状腺扫查方法,以根据患者图像和超声影像完成扫查过程。
214.以上仅为本发明较佳的实施例,并非因此限制本发明的实施方式及保护范围,对于本领域技术人员而言,应当能够意识到凡运用本发明说明书及图示内容所作出的等同替换和显而易见的变化所得到的方案,均应当包含在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1