一种肺癌识别设备的制作方法
1.本发明属于肺癌识别技术领域,具体涉及一种肺癌识别设备。
背景技术:
2.肺癌发生于支气管黏膜上皮,近50年来肺癌的发病率显著增高,在欧美工业发达国家和我国的一些工业大城市中,肺癌发病率在男性恶性肿瘤中已居首位,在女性发病率也迅速增高,占女性常见恶性肿瘤的第2位或第3位;肺癌解剖位置变异大,其病变组织与周围组织颜色相近,并包绕于周围组织中,术中识别困难,误切率高。
3.肺癌给患者生活质量造成严重影响,且三期以上的致死率较高,缺乏能够助于医护人员进行精确识别标定癌组织的设备。为此,我们提出一种肺癌识别设备。
技术实现要素:
4.本发明的目的在于提供一种肺癌识别设备,以解决上述背景技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:一种肺癌识别设备,包括检测握柄和位移系统,所述检测握柄包括检测控制器、发射纤维和接受纤维,所述检测控制器包括副处理器、激光发射器、调制器、解调器和储存模块,所述检测控制器还包括传输模块、近红外相机和电池,所述发射纤维和接受纤维相继插设于检测握柄内底部,所述副处理器的输出端通过导线与激光发射器、储存模块和传输模块的输入端构成电连接,所述激光发射器的输出端与解调器接受端连接,所述解调器输出端与发射纤维连接,所述接受纤维尾端与近红外相机接收端连接,所述近红外相机的输出端与解调器接受端连接,所述解调器输出端与副处理器连接,所述位移系统包括移动底座、y轴电动滑轨、x轴电动滑轨和z轴电动滑轨,所述移动底座顶部通过螺栓安装有主控制器。
6.进一步地,所述y轴电动滑轨底端通过螺栓安装于移动底座顶部一端,所述x轴电动滑轨尾端通过螺栓与y轴电动滑轨的滑动块安装连接,所述z轴电动滑轨底部与x轴电动滑轨的滑动块安装连接,所述z轴电动滑轨的滑动块顶部通过螺栓安装有伺服电机,所述伺服电机的驱动端顶部通过联轴器安装有机械臂,所述机械臂顶部配备有红外摄像头。
7.进一步地,所述主控制器包括主处理器、光学处理器和网络模块,所述主控制器还包括存储器和电源模块,所述移动底座与y轴电动滑轨的背部通过螺栓安装有牵引板,所述牵引板一侧顶部焊接连接有l型安装板,所述l型安装板一侧通过螺栓安装有显示器,所述主处理器的输出端与显示器和存储器的输入端通过导线构成电连接,所述主处理器与光学处理器和网络模块通过导线构成电连接,所述网络模块包括5g模块、无线模块和蓝牙模块。
8.进一步地,所述传输模块装配于检测控制器顶端,所述电池与传输模块顶端螺纹装配,所述电池为具备绝缘外壳的锂电池,所述传输模块顶端和电池底端装配有对应的供电插接口。
9.进一步地,所述检测握柄一侧通过螺栓安装有按键,所述按键输出端与副处理器输入端通过导线构成电连接。
10.进一步地,所述传输模块包括蓝牙模块和无线模块。
11.进一步地,所述主控制器一侧开设有散热口,所述网络模块内顶部两侧分别设有元件槽和握柄收纳槽,所述主控制器顶部盖设有与元件槽和握柄收纳槽对应的防护盖。
12.进一步地,所述移动底座底部通过螺栓安装有可制动万向轮。
13.与现有技术相比,本发明的有益效果是:
14.1.通过位移系统实现对整体肺癌识别设备提供自动化位移组件,且使用时,分别将主处理器的输出端与y轴电动滑轨、x轴电动滑轨、z轴电动滑轨、伺服电机和机械臂的输入端通过导线进行电连接,由主处理器对y轴电动滑轨、x轴电动滑轨、z轴电动滑轨、伺服电机和机械臂的使用状态进行操控,从而能够解放医护人员的双手,利用位移系统对识别的位置区域进行自动化位移抓握,且使用时,人员利用机械臂对检测握柄进行抓握,利用伺服电机对机械臂的使用角度进行旋转,通过y轴电动滑轨、x轴电动滑轨、z轴电动滑轨相继对伺服电机的x、z、y轴的使用位置进行滑动调节,从而助于医护人员能够利用智能终端与主控制器配备的5g模块、无线模块和蓝牙模块进行远程连接,达到对整体设备进行远程操控的作业,在满足对患者肺癌进行识别标定的同时,大大解决了传统只能通过现场作业操作的局限性,有助于外务高科医疗人员的协同作业研究,具有较高的实用性。
15.2.通过副处理器设定激光发射器所需发射的窄带辐射源的波长,且检测时,主峰波长为340nm-370nm,辅峰波长为450nm-470nm,随后将检测握柄的发射纤维和接受纤维底端对该区域的肺部感兴趣的组织接触或接近接触,按压按键对激光发射器触发操作命令,通过激光发射器分别发射区值为主峰波长为340nm-370nm和辅峰波长为450nm-470nm的辐射激光,经调制器对调制后,由发射纤维对肺部感兴趣的组织发出,患者受测体表的细胞外基质、线粒体和溶酶体在辐射源之间可激发旁腺自体荧光,由接受纤维对感兴趣组成反馈的波长进行接受,随后由近红外相机接受,并通过调制器解调后输送至副处理器,且副处理器通过传输模块的无线模块或蓝牙模块将检测的数据信号传输至主控制器的无线模块或蓝牙模块,并由主处理器将数据信号送至光学处理器进行光学分析处理,随后将分析后的数据回馈至主处理器,并由显示器进行显示,由主处理器计算接受的光源信号是否超过预定阀值,并对每组荧光探测区域发射接受的探测信号进行标记,再去除预定范围外的数值,留下反馈光达到400nm-700nm的标定区域,并计算确定后的数据进行确认保存,实现对患者完成肺部区域的肺癌标定检测工作,人员利用激发后荧光的主峰与辅助峰差异的光谱进行对比,在通过对比的差值进行自纠同时,助于人员更好的设定最合适的辐射光线。
附图说明
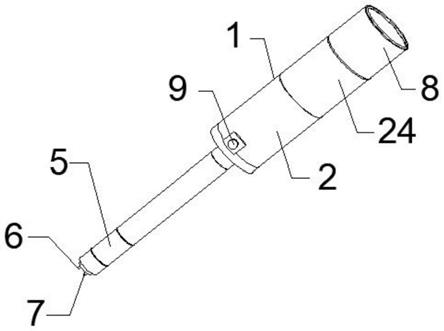
16.图1为本发明一种肺癌识别设备的检测握柄结构示意图。
17.图2为本发明一种肺癌识别设备的检测握柄结构示意图。
18.图3为本发明一种肺癌识别设备的移动底座结构示意图。
19.图4为本发明一种肺癌识别设备的移动底座结构示意图。
20.图5为本发明一种肺癌识别设备的主控制器结构示意图。
21.图6为本发明一种肺癌识别设备的电器连接示意图。
22.图中:1、检测握柄;2、检测控制器;5、近红外相机;6、发射纤维;7、接受纤维;8、电池;9、按键;10、移动底座;11、y轴电动滑轨;12、x轴电动滑轨;13、z轴电动滑轨;14、伺服电
机;15、机械臂;16、牵引板;17、l型安装板;18、显示器;19、主控制器;20、可制动万向轮;21、元件槽;22、防护盖;23、散热口;24、传输模块;25、副处理器;26、激光发射器;27、调制器;28、解调器;29、主处理器;30、储存模块;31、存储器;32、光学处理器;33、电源模块;34、握柄收纳槽;35、网络模块。
具体实施方式
23.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
24.实施例
25.如图1-6所示,一种肺癌识别设备,包括检测握柄1和位移系统,所述检测握柄1包括检测控制器2、发射纤维6和接受纤维7,所述检测控制器2包括副处理器25、激光发射器26、调制器27、解调器28和储存模块30,所述检测控制器2还包括传输模块24、近红外相机5和电池8,所述发射纤维6和接受纤维7相继插设于检测握柄1内底部,所述副处理器25的输出端通过导线与激光发射器26、储存模块30和传输模块24的输入端构成电连接,所述激光发射器26的输出端与解调器28接受端连接,所述解调器28输出端与发射纤维6连接,所述接受纤维7尾端与近红外相机5接收端连接,所述近红外相机5的输出端与解调器28接受端连接,所述解调器28输出端与副处理器25连接,所述位移系统包括移动底座10、y轴电动滑轨11、x轴电动滑轨12和z轴电动滑轨13,所述移动底座10顶部通过螺栓安装有主控制器19。
26.其中,所述y轴电动滑轨11底端通过螺栓安装于移动底座10顶部一端,所述x轴电动滑轨12尾端通过螺栓与y轴电动滑轨11的滑动块安装连接,所述z轴电动滑轨13底部与x轴电动滑轨12的滑动块安装连接,所述z轴电动滑轨13的滑动块顶部通过螺栓安装有伺服电机14,所述伺服电机14的驱动端顶部通过联轴器安装有机械臂15,所述机械臂15顶部配备有红外摄像头;红外摄像头助于人员对机械臂15的夹落点进行观察。
27.其中,所述主控制器19包括主处理器29、光学处理器32和网络模块35,所述主控制器19还包括存储器31和电源模块33,所述移动底座10与y轴电动滑轨11的背部通过螺栓安装有牵引板16,所述牵引板16一侧顶部焊接连接有l型安装板17,所述l型安装板17一侧通过螺栓安装有显示器18,所述主处理器29的输出端与显示器18和存储器31的输入端通过导线构成电连接,所述主处理器29与光学处理器32和网络模块35通过导线构成电连接,所述网络模块35包括5g模块、无线模块和蓝牙模块;牵引板16能够增加移动底座10与y轴电动滑轨11之间连接的稳定性。
28.其中,所述传输模块24装配于检测控制器2顶端,所述电池8与传输模块24顶端螺纹装配,所述电池8为具备绝缘外壳的锂电池,所述传输模块24顶端和电池8底端装配有对应的供电插接口。
29.其中,所述检测握柄1一侧通过螺栓安装有按键9,所述按键9输出端与副处理器25输入端通过导线构成电连接。
30.其中,所述传输模块24包括蓝牙模块和无线模块。
31.其中,所述主控制器19一侧开设有散热口23,所述网络模块35内顶部两侧分别设
有元件槽21和握柄收纳槽34,所述主控制器19顶部盖设有与元件槽21和握柄收纳槽34对应的防护盖22;元件槽21便于人员对设备数据线等电器元件进行收纳,握柄收纳槽34便于人员插设收纳检测握柄1。
32.其中,所述移动底座10底部通过螺栓安装有可制动万向轮20;可制动万向轮20助于人员对整体识别设备进行推动移动。
33.本发明的工作原理及使用流程:在对患者的肺部区域进行识别检测时,人员将定位用荧光对患者的肺部检测区域进行涂覆,通过副处理器25设定激光发射器26所需发射的窄带辐射源的波长,且检测时,主峰波长为340nm-370nm,辅峰波长为450nm-470nm,随后将检测握柄1的发射纤维6和接受纤维7底端对该区域的肺部感兴趣的组织接触或接近接触,按压按键9对激光发射器26触发操作命令,通过激光发射器26分别发射区值为主峰波长为340nm-370nm和辅峰波长为450nm-470nm的辐射激光,经调制器27对调制后,由发射纤维6对肺部感兴趣的组织发出,患者受测体表的细胞外基质、线粒体和溶酶体在辐射源之间可激发旁腺自体荧光,由接受纤维7对感兴趣组成反馈的波长进行接受,随后由近红外相机5接受,并通过调制器27解调后输送至副处理器25,且副处理器25通过传输模块24的无线模块或蓝牙模块将检测的数据信号传输至主控制器19的无线模块或蓝牙模块,并由主处理器29将数据信号送至光学处理器32进行光学分析处理,随后将分析后的数据回馈至主处理器29,并由显示器18进行显示,由主处理器29计算接受的光源信号是否超过预定阀值,并对每组荧光探测区域发射接受的探测信号进行标记,再去除预定范围外的数值,留下反馈光达到400nm-700nm的标定区域,并计算确定后的数据进行确认保存,实现对患者完成肺部区域的肺癌标定检测工作,由存储器31对整体肺部区域的肺癌标定检测作业数据进行记录储存,由储存模块30对检测握柄1的触发控制命令的数据信息进行储存;通过位移系统实现对整体肺癌识别设备提供自动化位移组件,且使用时,分别将主处理器29的输出端与y轴电动滑轨11、x轴电动滑轨12、z轴电动滑轨13、伺服电机14和机械臂15的输入端通过导线进行电连接,由主处理器29对y轴电动滑轨11、x轴电动滑轨12、z轴电动滑轨13、伺服电机14和机械臂15的使用状态进行操控,从而能够解放医护人员的双手,利用位移系统对识别的位置区域进行自动化位移抓握,且使用时,人员利用机械臂15对检测握柄1进行抓握,利用伺服电机14对机械臂15的使用角度进行旋转,通过y轴电动滑轨11、x轴电动滑轨12、z轴电动滑轨13相继对伺服电机14的x、z、y轴的使用位置进行滑动调节,从而助于医护人员能够利用智能终端与主控制器19配备的5g模块、无线模块和蓝牙模块进行远程连接,达到对整体设备进行远程操控的作业,在满足对患者肺癌进行识别标定的同时,大大解决了传统只能通过现场作业操作的局限性,有助于外务高科医疗人员的协同作业研究,具有较高的实用性。
34.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1