一种执行器械快拆装置及其机器人的制作方法
1.本发明涉及机器人结构领域,尤其涉及一种执行器械快拆装置及其机器人。
背景技术:
2.随着人工智能的发展,机器人被应用在了各行各业。其中,在医疗领域越来越多的手术机器人在临床外科中大量运用。
3.通常情况下,手术机器人的末端执行器械由于和手术区域相距很近,每次手术开始或结束的时候都需要从机械臂上拆下来进行消毒灭菌。现有的手术机器人末端执行器械通常采用螺钉与机械臂进行固定连接,螺纹连接虽然结构简单,连接可靠,但是拆卸步骤繁琐,操作时间长。同时,手术机器人属于一种高精度仪器,对稳定性和安全性要求比较高,常见的普通螺纹连接和多连杆过盈锁紧结构,受频繁的拆装的影响,容易出现螺钉滑扣和塑形变形等问题,从而进一步影响末端执行器的稳定性。铰链连接通常应用到需要经常打开和闭合的开合件中,不适用于手术机器人末端执行器械的固定。
4.此外,由于手术机器人在术中为了考虑无菌及方便消毒,通常会在安装末端器械时,利用连接件将塑料膜一并安装以覆盖机械臂及主机。由于增加了一层带有厚度的塑料膜,常规的螺钉连接及卡扣连接的不仅难度增加,并且稳定性也会有影响。同时螺钉连接也会破坏塑料膜的完整性,影响密封性。
技术实现要素:
5.发明目的:本发明针对上述不足,提出了一种执行器械快拆装置及其机器人,可以提供可靠牢固的定位和锁紧作用,并可以将无菌袋牢固夹紧固定,且完全不会破坏无菌袋的隔菌效果。
6.技术方案:
7.一种执行器械快拆装置,包括:
8.连接件,包括接口座与弹性连接座,二者上分别设有对应的凸台与凹槽,所述凸台置于所述凹槽内实现所述接口座与所述连接座的配合安装;
9.锁紧件,套设于所述连接件外并对所述弹性连接座施加压力将所述凸台锁紧至所述所述凹槽内。
10.所述弹性连接座的内径大于所述接口座的外径,内外径差为0.1~1.5mm。
11.所述接口座与所述弹性连接座的配合面均设计为沿安装方向半径逐渐增大的锥面。
12.所述凸台与所述凹槽为至少两组,且对称间隔设置于所述连接件的周向上。
13.所述凸台设计为与所述连接件轴向成30
°
~90
°
角度设置,所述凹槽对应设计。
14.所述凸台设计为与所述连接件轴向成90
°
角度设置,所述凹槽对应设计。
15.所述弹性连接座的侧壁通过沿轴向挖设的缺口槽形成间隔设置的圆柱壁和弹性梁,在所述弹性梁内侧面上设置所述凸台或凹槽,在所述接口座外侧面上对应位置处设有
相应的凹槽或凸台。
16.所述接口座外侧面上设置的凹槽或凸台设计为环形凹槽或环形凸台。
17.在所述连接座的外侧面设有外自锁螺纹,在所述锁紧件内侧面上与其对应位置处设有与之配合的内自锁螺纹。
18.在所述连接座的外侧面设有沿锁紧方向直径逐渐增大的外锥台阶,在所述锁紧件内侧面上与其对应位置处设有与之配合的内锥台阶,所述锁紧件与所述连接座之间通过所述内锥台阶和所述外锥台阶配合锁紧。
19.所述外锥台阶所在锥面与轴向之间的夹角设计为0.5
°
~15
°
范围内,所述内锥台阶对应设计。
20.在所述接口座内开设有空槽。
21.在所述接口座内与其外侧面上的所述凸台与所述凹槽配合安装处相对应的位置处设计为实心结构。
22.在所述锁紧件的外侧面上沿周向均匀间隔开设有旋紧槽。
23.所述旋紧槽为3个。
24.一种应用前述执行器械快拆装置的机器人,执行器械通过所述执行器械快拆装置安装至机器人的机械臂末端。
25.所述机械臂末端与所述接口座固定连接,所述执行器械与所述弹性连接座固定连接,并通过所述锁紧件进行锁定安装。
26.有益效果:本发明通过锥定位保证将无菌袋夹紧,通过内外圆柱面夹紧,保证无菌袋的完整性,有效保证手术隔菌效果,保证手术的安全性;同时保证末端器械的定位精度;通过自锁螺纹和自锁锥面配合,保证锁紧可靠无松动,即使频繁拆装后,也可以保证装配的可靠性和精准度。本发明的零件少、结构简单,易加工,成不低,且操作方便可靠。
附图说明
27.图1为本发明的快拆装置的安装示意图;
28.图2为本发明的快拆装置的爆炸图;
29.图3为本发明快拆装置的机械臂接口座的结构示意图;
30.图4为本发明快拆装置的器械连接座的结构示意图;
31.图5为本发明快拆装置的末端锁紧环的结构示意图;
32.图6为本发明快拆装置的装配示意图;
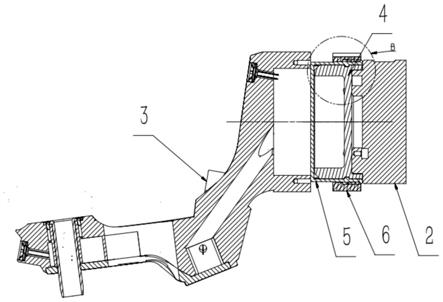
33.图7为本发明快拆装置的装配时的局部剖视图;
34.图8为安装本发明快拆装置的机器人的示意图。
35.图中,1.机器人台车,2.机械臂,3.执行器械,4.机械臂接口座,5.器械连接座,6.锁紧环;
36.41.环形槽,42.外圆柱面;
37.51.外锥台阶,52.外自锁螺纹,53.凸台,54.弹性梁,55.圆柱壁,56.缺口槽;
38.61.内自锁螺纹,62.内锥台阶,63.旋紧槽。
具体实施方式
39.下面结合附图和具体实施例,进一步阐明本发明。
40.图1为本发明的快拆装置的安装示意图,如图1所示,本发明的快拆装置安装于机器人机械臂末端与执行器械之间,用于执行器械快速装配至机械臂末端上。
41.图2为本发明的快拆装置的爆炸图,如图2所示,本发明的快拆装置包括与机械臂2末端固定连接的机械臂接口座4、与执行器械3固定连接的器械连接座5及将器械连接座5与机械臂接口座4配合锁定的锁紧环6。本发明中,机械臂接口座4与机械臂2末端之间、器械连接座5与执行器械3之间可以通过螺栓固定连接,当然也可以采用其他固定连接方式。
42.图3为本发明快拆装置的机械臂接口座的结构示意图,如图3所示,机械臂接口座4为圆柱形结构,其外侧壁设计为外圆柱面42;机械臂接口座4的一端与机械臂2末端固定连接,在其外圆柱面42上沿周向上开设有一环形槽41;更具体地,该环形槽41位置更靠近机械臂2末端。
43.在本发明中,可以在机械臂接口座4内开设凹槽,以减轻其重量;进一步地,开设的凹槽可以作为容纳与机械臂电源连接以为器械供电的无线充电线圈等。
44.更具体地,可以将机械臂接口座4内与其外侧面上的环形槽41对应位置处设计为实心结构,以增强刚度,从而使得安装更加稳固。
45.图4为本发明快拆装置的器械连接座的结构示意图,如图4所示,器械连接座5套装于机械臂接口座4外,其端部与执行器械3固定连接;考虑到在手术机器人的应用场景下,无法对整个机器进行消毒,通常需要对整机套设无菌袋。为了便于在快拆装置上安装无菌袋,器械连接座5的内径略大于机械臂接口座4的外径,从而在二者之间形成一定间隙,以使得在机械臂接口座4上套设无菌袋后方便器械连接座的拆卸且不会造成无菌袋的破损。进一步地,该间隙为无菌袋的厚度,设为0.1~1.5mm。而安装锁紧环6也保证了安装完成后整个机械臂末端的稳定性,防止在手术过程中快拆装置的轻微晃动影响精度。器械连接座5的侧壁通过沿轴向挖设的缺口槽56形成间隔设置的圆柱壁55和弹性梁54,其中,弹性梁54为至少两个,且对称设置于器械连接座5的侧壁周向上,圆柱壁55与之对应。在每一弹性梁54的内侧面上与机械臂接口座4外侧面上的环形槽41对应位置处均设有沿径向向内延伸用于与环形槽41配合的凸台53。
46.更具体地,凸台53沿径向延伸的距离小于器械连接座5与机械臂接口座4之间形成的间隙。
47.更具体地,弹性梁54设计为4个。器械连接座5的外侧面靠近执行器械的部分设计为圆柱面,远离执行器械的部分设计为外径大于圆柱面外径的外自锁螺纹52,在圆柱面与外自锁螺纹52之间设计为外径由圆柱面外径渐扩的外锥台阶51,且外锥台阶51与外自锁螺纹52相接处与弹性梁54内侧面上的凸台53的位置相对应;在本发明中,外锥台阶51所在锥面与轴向之间的夹角设计为0.5
°
~15
°
范围内。
48.本发明中,凸台53设置在弹性梁54内侧面上与器械连接座5的外锥台阶51对应位置处。
49.在本发明中,在机械臂接口座4外侧面设置环形槽41,但本发明不止于此,仅可以在机械臂接口座4外侧面为与弹性梁54内的凸台53对应位置处设置与凸台53对应配合的弧形槽即可。
50.在本发明中,弹性梁54内的凸台53设计为与器械连接座5轴向成一定角度设置,该角度为30
°
~90
°
;相应地,在机械臂接口座4外侧面为与凸台53对应位置处设置与凸台53对应配合的弧形槽。
51.本发明中,凸台53安装于器械连接座5上的弹性梁54内,凹槽设置于机械臂接口座4的外圆柱面42上,但本发明并不止于此,本发明也可以在器械连接座5上的弹性梁54内开设凹槽,在机械臂接口座4的外圆柱面42上相应位置处设置与之配合的凸台53;
52.进一步地,与前述一致,也可以在机械臂接口座4的外圆柱面42上与凹槽对应位置处设置环形凸台。
53.进一步地,机械臂接口座4的外圆柱面42设计为自其与器械连接座5配合的安装端至其固定于机械臂2末端的固定端方向直径逐渐增大的锥面,对应地,器械连接座5与机械臂接口座4的外圆柱面42的内侧面对应设计;通过如此设计可以减少器械连接座5与机械臂接口座4配合安装时凸台53的磨损。
54.如图1、5、7所示,锁紧环6套设于器械连接座5外,其内侧面包括与器械连接座5外侧面的外锥台阶51对应配合的内锥台阶62及与器械连接座5外侧面的外自锁螺纹52配合的内自锁螺纹61;如图7所示,进一步地,在内锥台阶62与内自锁螺纹61之间还设有一环形凹槽。
55.在锁紧环6的外侧面上沿周向均匀间隔开设有旋紧槽63,用于方便旋紧锁紧环6;更具体地,旋紧槽63设计为3个。
56.图6为本发明快拆装置的装配示意图,如图6所示,本发明的机械臂接口座4和器械连接座5分别与机械臂2末端和执行器械3固定连接,锁紧环6套设于器械连接座5外,在安装时,器械连接座5套装于机械臂接口座4外,并可轴向滑动,此时,弹性梁54由于其内侧面上的内台阶53与机械臂接口座4的外圆柱面42之间地配合关系,使得弹性梁54沿径向向外形变,在滑动至器械连接座5的弹性梁54内侧面上的内台阶53与机械臂接口座4外的环形槽41配合时,弹性梁54恢复原有位置,此时器械连接座5与机械臂接口座4之间完成粗配合固定;
57.移动锁定环6至其内内自锁螺纹61和内锥台阶62分别与器械连接座5外侧面的外锥台阶51和外自锁螺纹52接触,此时旋转锁定环6,使得其内内自锁螺纹61与器械连接座5外侧面的外自锁螺纹52配合,同时内锥台阶62轴向移动压紧外锥台阶51并随着锁定环6的旋进相互抵接配合,实现二者精定位,此时,锁定环6会压紧弹性梁54,使其向内收紧,与机械臂接口座4外的环形槽41充分接触配合,进而通过器械连接座5的圆柱壁55将无菌袋牢固压紧在机械臂接口座4的外圆柱面42上;由于内外自锁螺纹具有自锁功能,即锁紧后末端锁紧环6不会自动松动,保证固定可靠。从而将执行器械3牢固可靠的固定在机械臂2末端上,如图7所示;且由于内外锥台阶的锥面的角度设置在0.5
°
~15
°
范围内,可保证内外锥台阶的锥面配合具有自锁功能。
58.图8为安装本发明快拆装置的机器人的示意图,如图8所示,安装本发明快拆装置的机器人包括机器人台车1、机械臂2即通过本发明的快拆装置安装至机械臂2末端的执行器械3。
59.本发明通过锥定位保证将无菌袋夹紧,通过内外圆柱面夹紧,保证无菌袋的完整性,有效保证手术隔菌效果,保证手术的安全性,通过自锁螺纹和自锁锥面配合,保证锁紧可靠无松动,即使频繁拆装后,也可以保证装配的可靠性和精准度。
60.以上详细描述了本发明的优选实施方式,但是本发明并不限于上述实施方式中的具体细节,在本发明的技术构思范围内,可以对本发明的技术方案进行多种等同变换(如数量、形状、位置等),这些等同变换均属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1