一种轮式室外刚柔耦合腿部康复装置
1.本发明属于骨科医疗器械技术领域,具体涉及一种轮式室外刚柔耦合腿部康复装置。
背景技术:
2.物理治疗师的参与是实施腿部康复程序的必要条件,但患者与治疗师的比例正在增加,这就要求更多地使用工程技术来帮助治疗师进行步态康复干预。一些腿部康复系统已经被开发出来模仿治疗师的角色。然而,只有少数成功地商业化,腿部康复机器人仍存在巨大缺口,市场规模将高速增长。同时,使用者由于久坐在医院,表达出迫切渴望外出训练的心情,商业化室外康复训练机器人迫在眉睫。
技术实现要素:
3.本发明的目的在于提供一种帮助腿部受伤者在室外运动,能够适应人体不同腿部恢复阶段的轮式室外刚柔耦合腿部康复装置
4.本发明一种轮式室外刚柔耦合腿部康复装置,包括气源、机架、臀部支撑机构和两个腿部辅助运动机构。臀部支撑机构安装在机架中部。两个腿部辅助运动机构分别安装在臀部支撑机构,用于辅助使用者的双腿进行运动。所述的腿部辅助运动机构包括八连杆组件、气囊驱动组件和脚踏板。
5.所述的八连杆组件包括气囊驱动组件、固定杆、主动杆、第二连杆、第一三角杆、第三连杆、第二三角杆、第四连杆和第五连杆。固定杆固定在固定板上;主动杆的内端与固定杆的一端铰接;主动杆的外端与第二连杆的一端转动连接。第二连杆的另一端与第一三角杆的第一端转动连接;第一三角杆第二端与第三连杆转动连接,第一三角杆的第三端与安装板转动连接。第三连杆的另一端与第二三角杆的第一端转动连接,第二三角杆的第二端与第四连杆的一端转动连接。第二三角杆的第二端与第五连杆的一端转动连接。第五连杆的另一端与安装板转动连接。脚踏板安装在第二三角杆上。所述的气囊驱动组件安装在主动杆与固定杆之间,用于驱动主动杆绕固定杆转动。
6.作为优选,所述机架的底部安装有行进组件。所述的行进组件包括轮轴、车轮、车轮动力齿轮组和第一驱动电机。两根轮轴分别转动连接在机架底部的前后两端。两根轮轴的两端均固定有车轮。车轮动力齿轮组包括主动齿轮和从动齿轮。主动齿轮、从动齿轮与第一驱动电机的输出轴、其中一根轮轴分别固定。主动齿轮与从动齿轮啮合。
7.作为优选,所述的臀部支撑机构包括液压推杆、推块、坐垫限位螺栓组、伸缩杆、坐垫和座位轨道。水平设置的座位轨道和液压推杆均固定在机架的中间位置。座位轨道高于液压推杆。伸缩杆滑动连接在座位轨道上。坐垫固定在伸缩杆上;推块与机架构成水平方向滑动的滑动副。推块的顶部与伸缩杆通过连接杆连接,侧部与液压推杆的活塞杆固定。
8.作为优选,所述的连接杆与伸缩杆的端部能够沿竖直方向相对滑动和锁止。
9.作为优选,所述第二三角杆上安装有调节杆。第二三角杆上开设有滑槽。调节杆与
第二三角杆上的滑槽通过踏板限位螺栓组固定。调节杆能够在滑槽上调节位置。调节杆经过第二三角杆的底部。第二三角杆的底端固定或转动连接有脚踏板。
10.作为优选,所述脚踏板的顶面固定有压力传感器。
11.作为优选,所述的气囊驱动组件包括还包括限位弹簧。限位弹簧的两端与主动杆与固定杆的侧部分别固定。
12.作为优选,所述的气囊驱动组件包括电磁阀、周向膨胀气囊和进出气管。周向膨胀气囊固定在主动杆与固定杆的连接处内侧。周向膨胀气囊的内腔与气源通过电磁阀和进出气管连接。
13.作为优选,所述的周向膨胀气囊包括相邻侧粘接固定在一起的第一气囊单元和第二气囊单元。第一气囊单元和第二气囊单元结构相同,中部均设置有从外端向内延伸的隔断缝。隔断缝将第一气囊单元或第二气囊单元的内腔分隔为内端连通在一起的两个膨胀腔。充压时,两个膨胀腔均胀大并相互挤压,使得对应的气囊单元的两侧沿周向相互远离。第一气囊单元和第二气囊单元的内腔连通。
14.作为优选,在工作过程中,根据压力传感器检测到压力大小调节周向膨胀气囊膨胀过程中的输入气压,当压力传感器检测到的压力增大时,减小周向膨胀气囊膨胀过程中的输入气压。
15.本发明具有的有益效果是:
16.1、本发明利用八连杆组件模拟人体腿部的运行轨迹,并使用周向膨胀气囊驱动八连杆组件,取代传统机器人的电机动力传动,实现对八连杆组件的柔性驱动,提高使用者的舒适性,并能够避免损伤。
17.2、本发明采用推杆的方式,帮助使用者进入机器;此外,本发明所有与使用者接触的部位均可调节,让使用者感到最佳体验。
18.3、本发明使用机电一体化控制,电磁阀与传感器形成反馈控制,为使用者定制实时的个性化康复,极大程度地提高了使用者的恢复效率。
19.4、本机器采用刚柔耦合,外部的刚性材料保障了康复人员的安全健康,内部的柔性驱动使康复训练更具适应性与舒适性。
20.5、本发明的应用环境设计在室外,有助于腿脚不便,久坐室内的使用者身心愉悦。
附图说明
21.图1为本发明的第一张整体结构示意图;
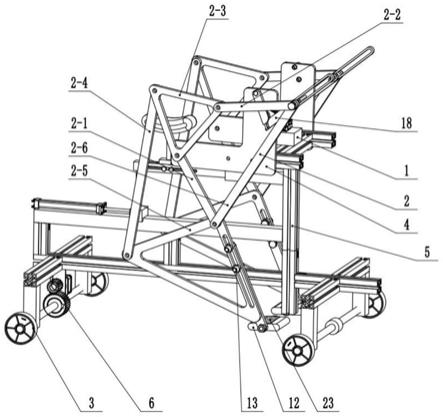
22.图2为本发明的第二张整体结构示意图;
23.图3为本发明中气囊驱动组件安装位置的示意图;
24.图4为本发明中气囊驱动组件的膨胀过程示意图;
25.图5为本发明中气囊驱动组件的结构示意图;
26.图6为本发明中八连杆组件的运动简图;
27.图7为本发明中臀部支撑机构的局部示意图;
28.图8为本发明的控制系统示意图。
具体实施方式
29.以下结合附图对本发明作进一步说明。
30.如图1和2所示,一种轮式室外刚柔耦合腿部康复装置,包括气源1、机架5、行进组件、臀部支撑机构和两个腿部辅助运动机构2。行进组件安装在机架5的底部,用于驱动机架行驶,达到模拟前进的作用,使得辅助运动更加真实。臀部支撑机构安装在机架5中部,用于供使用者保持坐姿。两个腿部辅助运动机构2分别安装在臀部支撑机构,用于带动使用者的双腿进行运动。
31.行进组件包括轮轴、车轮3、车轮动力齿轮组6和第一驱动电机7。两根轮轴分别转动连接在机架5底部的前后两端。两根轮轴的两端均固定有车轮3。车轮动力齿轮组6包括主动齿轮和从动齿轮。主动齿轮、从动齿轮与第一驱动电机7的输出轴、其中一根轮轴分别固定。主动齿轮与从动齿轮啮合。
32.如图2和7所示,所示,臀部支撑机构包括液压推杆8、推块9、坐垫限位螺栓组10、伸缩杆20、坐垫11、座位轨道19。水平设置的座位轨道19和液压推杆8均固定在机架5的中间位置。座位轨道19和液压推杆8分别位于机架5的前后两端。座位轨道19高于液压推杆8。伸缩杆20滑动连接在座位轨道19上。坐垫11通过坐垫限位螺栓组10固定在伸缩杆20上;推块9与机架构成水平方向滑动的滑动副。推块9的顶部与伸缩杆20通过连接杆连接,侧部与液压推杆8的活塞杆固定。该连接杆与伸缩杆20的端部能够沿竖直方向相对滑动。座位轨道19的高度能够调节。液压推杆8的伸缩运动能够调节坐垫11的水平方向位置。
33.如图3和6所示,腿部辅助运动机构2包括八连杆组件、气囊驱动组件、脚踏板12、安装板4、压力传感器23和踏板限位螺栓组13。八连杆组件包括气囊驱动组件、固定杆16、主动杆18、第二连杆2-2、第一三角杆2-3、第三连杆2-4、第二三角杆2-5、第四连杆2-6和第五连杆2-1。固定杆16固定在固定板4上;主动杆18的内端与固定杆16的一端铰接;主动杆18的外端与第二连杆2-2的一端转动连接。第二连杆2-2的另一端与第一三角杆2-3的第一端转动连接;第一三角杆2-3第二端与第三连杆2-4转动连接,第一三角杆2-3的第三端与安装板4转动连接。第三连杆2-4的另一端与第二三角杆2-5的第一端转动连接,第二三角杆 2-5的第二端与第四连杆2-6的一端转动连接。第二三角杆2-5的第二端与第五连杆2-1的一端转动连接。第五连杆2-1的另一端与安装板4转动连接。第二三角杆2-5的第三端位于第二三角杆2-5的底部,用于形成脚步辅助运动的轨迹。该轨迹呈扁平的弧线状,与步行时脚掌的实际轨迹相近。
34.第二三角杆2-5上安装有调节杆。第二三角杆2-5上开设有滑槽。调节杆与第二三角杆 2-5上的滑槽通过踏板限位螺栓组13固定。调节杆能够在滑槽上调节位置。调节杆经过第二三角杆2-5的底部。第二三角杆2-5的底端固定或转动连接有脚踏板12。脚踏板12的顶面固定有压力传感器23,用以记录使用者给装置的压力。
35.如图4和6所示,气囊驱动组件安装在主动杆18与固定杆16之间,用于驱动主动杆18 绕固定杆16转动,其包括限位弹簧14、电磁阀22、周向膨胀气囊15和进出气管17。周向膨胀气囊15固定在主动杆18与固定杆16的连接处内侧,充压时驱动主动杆18在接近360
°
的范围内旋转。限位弹簧14的两端与主动杆18与固定杆16的侧部分别固定,用于为主动杆18 提供复位力。周向膨胀气囊15的内腔与气源1通过电磁阀22和进出气管17连接。
36.周向膨胀气囊15包括相邻侧粘接固定在一起的第一气囊单元和第二气囊单元。第
一气囊单元的中部设置有从外端向内延伸的第一隔断缝27。第一隔断缝27将第一气囊单元分隔为内端连通在一起的两个第一膨胀腔。对第一气囊单元充压时,两个第一膨胀腔均胀大并相互挤压,使得第一气囊单元的两侧沿周向相互远离。第二气囊单元的中部设置有从外端向内延伸的第二隔断缝28。第二隔断缝28将第二气囊单元分隔为内端连通在一起的两个第二膨胀腔。对第二气囊单元充压时,两个第二膨胀腔均胀大并相互挤压,使得第二气囊单元的两侧沿周向相互远离。
37.第一气囊单元和第二气囊单元的相邻侧为内部连接壁25;内部连接壁25上开设有通气孔 29。通气孔29使得第一气囊单元和第二气囊单元的内腔连通,实现同步充压和泄压。第一气囊单元与第二气囊单元的相背侧面形成周向膨胀气囊15的第一安装面24和第二安装面26。第一安装面24、第二安装面26与主动杆18、固定杆16的相邻侧分别粘接固定。
38.周向膨胀气囊15充气后,该容器主要膨胀面为容器的第一面27、第二面28。第一面27、第二面28会随着进行气体的冲入,使该处贴合的两面分离,进而起到撑大固定杆16与驱动主动杆18的相对角度的目的,实现提供动力源的作用。
39.如图1、图2、图3所示,将气源1固定在机架5上,通过进出气管17对周向膨胀气囊 15进行充放气压强的循环控制。通过周向膨胀气囊15的充放气压强的变化带动主动杆18(腿部辅助运动机构)在两个极限状态之间往复变形。周向膨胀气囊15与主动杆18、固定杆16 通过硅胶棒粘接,周向膨胀气囊15类似蜘蛛液压关节外骨骼内部的动脉血管,为两侧的刚性杆提供流体供应动力,使得机器人的制动更加具有柔性。
40.该室外康复机器装置的工作过程具体如下:
41.步骤一、使用者坐于坐垫11中,可根据自身情况调节螺栓组10进行纵向横向调节。
42.步骤二、液压推杆8推动推块9将使用者送入到工作位内。
43.步骤三、使用者将双脚分别放置到两块踏板12处,并调节螺栓组13进行纵向调节。
44.步骤四、气源1驱动分别驱动两个周向膨胀气囊15进行周期性膨胀和收缩。两个周向膨胀气囊15膨胀收缩运动的相位错位180
°
,使得使用者的双腿进行交叉运动。驱动电机7供电使车轮3旋转,为使用者提供模拟前进和后退的感受。
45.步骤五、待运动结束后,气源1、腿部辅助运动机构2和驱动电机7停止运作,液压推杆 8收缩,滑块9将使用者送出装置。
46.如图8所示,该轮式室外运动腿部康复装置的控制方法具体如下:
47.将人体恢复腿部机能情况近似约等于为当前驱动压力传感器23与正常人驱动时压力传感器23数值的百分比。如当数值为正常人驱动数值30%,近似看成人体恢复情况约为30%。
48.基于此条件下,电磁阀22控制气体的压强与踏板压力传感器23数值大小形成闭环控制,传感器数值越大,电磁阀22控制气体压强流速越低,反之亦然。同时设置该以下的发力模式:
49.被动发力模式、当人体恢复腿部机能约为正常人体的40%以下时,装置处于完全康复状态。此时的机器运行动力基本绝大多数源自于本机器装置,实现机器主动发力,病人处于被动发力的模式。
50.助动发力模式、当人体恢复腿部机能低于约为正常人体的40%-80%时,装置处于局部康复状态。此时的机器运行基本来源于人体与机器装置。实时对比压力传感器23大小
与电磁阀 22流速数据,并通过电磁阀22控制流速,实现人先发力,后机器助力的模式。
51.主动发力模式、当人体恢复腿部机能超过约为正常人体的80%时,装置基本处于亚康复状态。此时机器动力来源基本来源于人体本身,基本实现人发力带动机器运作的模式。同时周向膨胀气囊15也处于一定的充压状态,用于在突发情况的发生时对病人的保护。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1