一种基于机器人的耳石症诊疗系统的制作方法
1.本发明涉及医疗器械技术领域,具体涉及一种基于机器人的耳石症诊疗系统。
背景技术:
2.耳石症又称为良性阵发性位置性眩晕(bppv),耳石是内耳中一种微小的碳酸钙盐结晶,正常情况下耳石是附着于耳石膜上的,当耳石脱离后就会在内耳中的内淋巴液里游动,当人体头位变化时,半规管亦随之发生位置变化,沉伏的耳石就会随着液体的流动而运动,从而刺激半规管毛细胞,导致机体发生强烈性眩晕,可伴有剧烈的恶心、呕吐等症状;半规管是感受人体姿势变换的重要结构,半规管分为上半规管、后半规管及外半规管,三者所在平面相互垂直,感应不同平面人体的变化姿势;针对半规管的诊疗原理便是通过对相应半规管所在平面的加速或减速旋转,刺激对应的半规管,通过对眼震的检查,可以得知半规管功能情况。
3.耳石症的治疗,主要的就是复位,就是用体位变化来使得脱落入半规管的耳石重新回到椭圆囊里面。临床上的治疗手段又分为人工手法复位和医疗设备复位,其中人工手法复位较为常用,但人工手法复位存在一些缺陷:
①
对主治医师要求非常高,需要医师对耳石症的发病原理,确诊手段,治疗手法具备非常专业的知识;
②
在治疗过程中无法精确掌握复位角度,只能凭借经验进行多次尝试;
③
对于肥胖或患有腰椎病、颈椎病的患者,复位治疗难度则更大,极易造成患者腰椎或颈椎的二次伤害;
④
对医师的体力要求较高,治疗过程中需要多次变换患者体位,医师很容易感到疲累。临床上采用医疗设备进行复位治疗具有自动化程度高,治疗效率高的特点,但目前的耳石复位诊疗设备还存在一些缺陷:
①
设备体积和重量较大,导致占用空间较大;
②
自由度较少,一般只具有两个转动自由度,患者在复位治疗过程中需要频繁调节体位;
③
不具有移动自由度,无法在加速或减速状态下对半规管进行眩晕诊断;
④
缺乏头位精准定位,不能精准定位半规管平面,而半规管精准定位对于耳石症复位诊疗具有非常重要的意义;
⑤
成熟的系统大多是进口设备,导致采购成本高昂,不利于向中小医院的普及。因此,研制一种自由度多、成本低、功能丰富的耳石症诊疗系统来完成对患者的诊断和治疗具有明显的经济效益和社会效益。
技术实现要素:
4.为解决现有技术的不足,本发明的目的在于提供一中成本低、智能化程度高、效果好的耳石症诊疗系统。
5.本发明采取的技术方案为:一种基于机器人的耳石症诊疗系统,包括座椅机构和机器人。
6.作为优选,座椅机构包括座椅、压杆、横移架、纵转电机、转接件、齿条、齿轮、横移电机、电推杆,其特征在于:座椅上设置有供患者乘坐的坐板、供患者依靠的靠背和支撑患者双脚的脚托,坐板上侧设有上绑带,对应患者小腿位置设有下绑带;靠背上端设有用于实现患者头部固定的头枕,座椅后侧设有可承载座椅和患者重量的固定架。
7.作为优选,压杆上端与座椅转动连接并由电推杆驱动,座椅与横移架构成移动副,横移电机可驱动座椅的移动,横移架与转接件下侧转动连接,纵转电机可驱动横移架的转动,转接件与机器人中的转盘紧固连接。
8.作为优选,机器人具有六个空间自由度,分别为三个移动自由度和三个转动自由度。
9.作为优选,座椅可在横移架上移动和锁止位置,从而可对患者的单侧半规管进行离心测试。
10.作为优选,压杆可实现患者上半身在座椅上的固定,压杆前侧设有两个可供患者双手握持的把手,在复位治疗过程中有利于患者稳固自己的身体并增强患者的安全感。
11.作为优选,上绑带用于固定患者大腿,下绑带用于固定患者小腿,从而实现患者下半身在座椅上的固定,上绑带和下绑带均可通过插口结构实现快速连接和打开。
12.作为优选,头枕外表面覆盖有硅胶材质,在实现患者头部定位的同时也具有较为舒适的接触体验。
13.作为优选,压杆上端设置的较为宽敞,防止压伤患者肩膀,压杆下端设置为向前突出的横杆,防止压杆对患者腹部造成过多压迫。
14.本发明的有益效果:
①
六轴机器人是成熟可靠的技术,具有运动稳定、定位灵活迅速、精度高、占用空间小等优点,属于量产商品,应用于耳石症诊疗系统后,可有效降低设备整体成本;
②
机器人具有三个转动自由度,可使患者实现三个维度的自由旋转及任意位置的悬停,机器人具有三个移动自由度,可使患者在前后方向、左右方向实现加速和减速,也能使患者在竖直方向实现超重和失重;
③
通过改变座椅的纵转轴心位置,可对患者单侧半规管进行离心测试。
附图说明
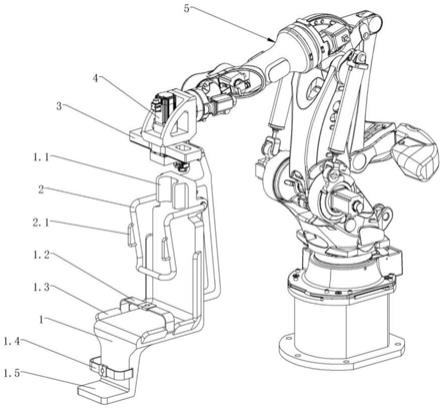
15.图1为本发明的整体结构示意图。
16.图2为座椅机构的整体结构示意图。
17.图3为机器人的整体结构示意图。
18.图4为本发明对耳石症进行诊疗时其中的四个姿态展示示意图。
19.图5为半规管离心测试的原理图。
20.附图标号:1座椅、1.1头枕、1.2上绑带、1.3限位条、1.4下绑带、1.5脚托、1.6固定架、1.7转接座、2压杆、2.1把手、2.2转动杆、3横移架、4纵转电机、5机器人、5.1基座、5.2底座、5.3第一臂、5.4第二电机、5.5第三电机、5.6第二臂、5.7第一电机、5.8配重块、5.9拉杆、5.10弹簧杆、5.11第三臂、5.12第四电机、5.13第四臂、5.14第五电机、5.15第五臂、5.16转盘、5.17第六电机、6转接件、7齿条、8齿轮、9横移电机、10电推杆。
具体实施方式
21.下面结合具体实施例对本发明作进一步描述,在此发明的示意性实施例以及说明用来解释本发明,但并不作为对本发明的限定。
22.如图1所示,所述的座椅1上设有坐板供患者乘坐,坐板上侧设置有上绑带1.2,上绑带1.2可通过插口结构实现快速连接和打开,上绑带1.2用于绑缚患者大腿部位,将患者
身体固定于座椅上,座椅1后侧设有靠背,坐板和靠背两侧设置有限位条1.3,限位条1.3可对患者身体提供侧向支撑,靠背顶端设有头枕1.1,头枕1.1中间成凹陷结构,供患者头部进行定位,防止患者在复位治疗过程中头部左右摆动,头枕1.1外表面覆盖有硅胶材质,在实现头部定位的同时具有较为舒适的接触体验,座椅1下端设有脚托1.5,脚托1.5可供患者双脚踩踏,从而为患者小腿提供支撑,座椅1下端对应患者小腿位置设有下绑带1.4,下绑带1.4可通过插口结构实现快速连接和打开,下绑带1.4用于绑缚患者小腿部位,使小腿固定于座椅1上。
23.所述的压杆2上端与座椅1上端后侧转动连接,压杆2为管件折弯结构,用于将患者上身压紧于靠背上,压杆2外侧包覆有硅胶材质,使患者具有较好的接触体验,压杆2前侧设有两个把手2.1,把手2.1可供患者双手握持,在复位治疗过程中有利于患者稳固自己的身体并增强患者的安全感,由于肩膀位置软组织覆盖较少,故而压杆2上端设置的较为宽敞,防止压伤患者肩膀,由于腹部位置没有骨骼保护,故而压杆2下端设置为向前突出的横杆,防止压杆2对患者腹部造成过多压迫。
24.如图2所示,所述的靠背后侧设置有转接座1.7,压杆2后端设置有转动杆2.2,所述的电推杆10下端与转接座1.7转动连接,电推杆10上端与转动杆2.2转动连接,从而电推杆10伸长可使压杆2向下转动并压紧患者上半身,电推杆10收缩可使压杆2向上转动,可供患者上下座椅。
25.所述的座椅1后侧设有固定架1.6,固定架1.6与靠背后侧固定连接,固定架1.6通过筋板与坐板下侧紧固连接,从而固定架1.6可为座椅1提供稳定支撑,固定架1.6上端固定安装有四个滑块,横移电机9通过螺钉紧固安装于固定架1.6上端,齿轮8与横移电机9的输出轴同轴紧固连接,所述的横移架3下侧横向设有两个平行的导轨,两个导轨与固定架1.6上端的四个滑块配合安装,使固定架1.6与横移架3构成移动副,横移架3后侧横向固定设置有齿条7,齿条7与齿轮8啮合构成齿轮齿条传动结构,从而横移电机9可驱动座椅1在横移架3下侧的横向移动;横移架3上侧中间位置设有转轴,转轴与转接件6下端转动连接,纵转电机4通过螺钉固定安装于转接件6上侧,且纵转电机4输出轴与横移架3上侧的转轴同轴紧固连接,从而纵转电机4可驱动横移架3的转动;转接件6后侧通过螺钉与机器人5的转盘5.16紧固连接,从而机器人5可驱动座椅1在空间坐标中的移动和转动。
26.如图3所示,所述的机器人5具有六个空间自由度,所述的基座5.1用于为机器人5提供稳定的支撑基础,并将机器人5抬高到适当高度,基座5.1下端通过地脚螺栓固定安装于地面,基座5.1上端通过螺钉与底座5.2下端紧固连接,第一臂5.3下端安装于底座5.2上端并构成转动副,第一电机5.7紧固安装于第一臂5.3下端并可驱动第一臂5.3的转动,第二臂5.6下端与第一臂5.3上端转动连接,第二电机5.4紧固安装于第一臂5.3上端左侧并可驱动第二臂5.6的转动,配重块5.8前端与第一臂5.3上端转动连接,第三电机5.5紧固安装于第一臂5.3上端右侧并可驱动配重块5.8的转动,两个弹簧杆5.10均为拉力弹簧杆,并分别安装于机器人5两侧,两个弹簧杆5.10上端均与第二臂5.6上端转动连接,两个弹簧杆5.10下端均与第一臂5.3上端转动连接,当第二臂5.6过度向前或过度向后转动时均会拉动两个弹簧杆5.10,从而两个弹簧杆5.10可在第二臂5.6的转动过程中减轻第二电机5.4的压力,第三臂5.11下侧与第二臂5.6上端转动连接,第三臂5.11后端与拉杆5.9上端转动连接,拉杆5.9下端与配重块5.8中间位置转动连接,从而第二臂5.6、配重块5.8、拉杆5.9、第三臂
5.11构成四边形结构,进而第三电机5.5可通过四边形结构驱动第三臂5.11的转动,第四臂5.13后端与第三臂5.11前端转动连接,第四电机5.12紧固安装于第三臂5.11前端并可驱动第四臂5.13的转动,第五臂5.15后端与第四臂5.13前端转动连接,第五电机5.14紧固安装于第四臂5.13前端并可驱动第五臂5.15的转动,转盘5.16转动安装于第五臂5.15前端,第六电机5.17紧固安装于第五臂5.15前端并可驱动转盘5.16的转动。
27.实施例一:对耳石症患者进行诊疗时,为保证患者人身安全和复位治疗效果,需要将患者有效固定于座椅1上,首先电推杆10收缩使压杆2向上转动后打开,患者坐于座椅1上,头部紧靠头枕1.1并保持位置不动,之后电推杆10伸长使压杆2向下转动后压住患者上身,患者双手紧握两个把手2.1,在医务人员的帮助下,将上绑带1.2扎紧使患者大腿位置固定于座椅上,再将下绑带1.4扎紧使患者小腿位置固定于座椅上,从而实现患者整个身体在座椅上的固定。
28.实施例二:所述的机器人5具有三个移动自由度,从而可使患者在前后方向、左右方向实现加速和减速,也能使患者在竖直方向实现超重和失重,并通过检测患者的眼震情况确定患者的病情,从而制定有效的复位方案。
29.实施例三:所述的机器人5具有三个转动自由度,从而可使患者实现三个维度的自由旋转及任意位置的悬停,进而通过检测患者的眼震情况确定患者的病情,从而制定有效的复位方案。
30.实施例四:所述的座椅1位于纵转电机4轴线正下方时,纵转电机4转动后可驱动座椅1上的患者以左耳和右耳的中间位置为轴线旋转,此状态时可进行双侧半规管离心测试,用于检测眼震的功能状态。
31.实施例五:所述的横移电机9转动,使座椅1向左移动,并使右耳半规管位于纵转电机4轴线正下方,纵转电机4转动后可驱动座椅1上的患者以右耳半规管所在位置为轴线旋转,此状态时可对左耳半规管进行离心测试;
32.所述的横移电机9转动,使座椅1向右移动,并使左耳半规管位于纵转电机4轴线正下方,纵转电机4转动后可驱动座椅1上的患者以左耳半规管所在位置为轴线旋转,此状态时可对右耳半规管进行离心测试。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1