聚焦超声系统及确定成像参数的方法、控制方法、介质与流程
1.本发明涉及医疗设备领域,具体地,涉及一种确定聚焦超声系统的成像参数的方法、一种聚焦超声系统的控制方法、一种图像处理装置、一种控制器、一种聚焦超声系统和一种计算机可读介质。
背景技术:
2.在通过聚焦超声手术(fus,focused ultrasound surgery)治疗肿瘤的过程中,需要进行实时影像监控。可以采用b超或者彩超进行影像监控,然而市场上的超声设备均用于诊断目的,而非用于肿瘤治疗过程中的监控和定位。
3.在使用超声设备进行诊断时,使用与人体组织声学特性相近的耦合剂,且超声探头紧贴皮肤,将成像参数调整好后,不需要再对成像参数进行调整。
4.但是,在通过fus治疗肿瘤时,不能使用耦合剂,而是使用纯净水做介质,探头与皮肤之间的距离不断变化,成像参数也需要不断调整。这些因素使得用于诊断目的的超声设备难以用于fus过程中的监控。
技术实现要素:
5.本发明的目的在于提供一种确定聚焦超声系统的成像参数的方法、一种聚焦超声系统的控制方法、一种图像处理装置、一种控制器、一种聚焦超声系统和一种计算机可读介质。
6.作为本公开的第一个方面,提供一种确定聚焦超声系统的成像参数的方法,包括:
7.获取超声影像;
8.识别所述超声影像中皮肤边缘的位置;
9.根据所述超声影像中皮肤边缘的位置确定皮肤与超声探头之间的距离;
10.根据皮肤与超声探头之间的距离确定所述聚焦超声系统当前的成像参数。
11.可选地,所述聚焦超声系统的成像参数包括超声探头的探头功率,在所述根据皮肤与超声探头之间的距离生成所述聚焦超声系统当前的成像参数的步骤中,根据以下公式计算所述探头功率:
12.p1=k0*s1+kw*sw;
13.s1=s-sw=1/2*θ*(h*h-skin_dis*skin_dis);
14.sw=1/2*θ*(skin_dis)*(skin_dis);
15.其中,
16.p2为所述探头功率;
17.s1为所述超声影像中,超声波穿透生物体的面积;
18.sw为所述超声影像中超声波穿过介质的面积;
19.θ为所述超声影像的扇角;
20.skin_dis为所述超声探头与皮肤之间的距离;
21.k0为生物体的平均声阻抗系数;
22.kw为探头与皮肤之间的介质的声阻抗系数。
23.可选地,所述聚焦超声系统的成像参数包括所述超声探头的成像焦点的位置,在所述根据皮肤与超声探头之间的距离生成所述聚焦超声系统当前的成像参数的步骤中,根据以下公式计算所述成像焦点与超声探头之间的距离:
24.f=(h+skin_dis)/2;
25.其中,h为超声探头的探测深度;
26.skin_dis为所述超声探头与皮肤之间的距离。
27.作为本公开的第二个方面,提供一种聚焦超声系统的控制方法,包括:
28.接收根据本公开的一个方面所述的方法确定的所述聚焦超声系统当前的成像参数;
29.根据预定策略和所述成像参数生成调节信号;
30.将所述调节信号提供给所述聚焦超声系统的功能部件。
31.可选地,当所述超声探头的成像焦点位于所述生物体外部时,根据所述成像参数生成的调节信号包括使得所述超声探头的成像焦点位于所述生物体内部的调节信号。
32.可选地,根据预定策略和所述成像参数生成调节信号的步骤中,对时间增益补偿参数进行调节包括:
33.将所述时间增益补偿参数调至最低值。
34.作为本公开的第三个方面,提供一种图像处理装置,包括:
35.第一存储模块,其上存储有第一可执行程序;
36.一个或多个第一处理器,当所述一个或多个第一处理器调用所述第一可执行程序时,能够实现本公开第一个方面所述的方法。
37.作为本公开的第四个方面,提供一种控制器,包括:
38.第二存储模块,其上存储有第二可执行程序;
39.一个或多个第二处理器,当所述一个或多个第二处理器调用所述第二可执行程序时,能够实现本公开第二个方面所提供的控制方法。
40.作为本公开的第五个方面,提供一种聚焦超声系统,包括:
41.第三个方方面所提供的图像处理装置;
42.第四个方面所提供的控制器;
43.功能部件。
44.可选地,所述聚焦超声系统还可以包括信息传输接口和影像传输接口,所述信息传输接口设置在所述图像处理装置中,以将所述图像处理装置确定的成像参数传输至所述控制器,所述影像传输接口用于接收超声影像。
45.作为本公开的第六个方面,提供一种计算机可读介质,其上存储有可执行程序,当所述可执行程序被调用时,能够实现本公开所提供的上述方法。
46.成像参数多与超声探头与皮肤之间的距离有关。通过对超声影响中皮肤的位置进行识别,可以确定皮肤与超声探头之间的距离。确定了皮肤与超声探头之间的距离之后,即可确定聚焦超声系统当前的成像参数。
47.确定成像参数,就相当于对fus过程进行了监控。可以根据fus操作需求对成像参
数进行调整。
48.在本公开中,不需要操作者人为观察,通过对超声图像进行识别即可实现对fus过程的监控。
49.本公开所提供的方法可以由电子设备所执行,无需对市场上现有的超声设备进行改进。也就是说,通过本公开所提供的方法可以以较低的成本实现fus过程中的成像参数监控。
附图说明
50.附图是用来提供对本发明的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本发明,但并不构成对本发明的限制。在附图中:
51.图1是本公开第一个方面所提供的方法的流程图;
52.图2是本公开第二个方面所提供的方法的流程图。
具体实施方式
53.为使本领域的技术人员更好地理解本公开的技术方案,下面结合附图对本公开提供的确定聚焦超声系统的成像参数的方法、聚焦超声系统的控制方法、图像处理装置、控制器、聚焦超声系统和计算机可读介质进行详细描述。
54.在下文中将参考附图更充分地描述示例实施例,但是所述示例实施例可以以不同形式来体现且不应当被解释为限于本文阐述的实施例。反之,提供这些实施例的目的在于使本公开透彻和完整,并将使本领域技术人员充分理解本公开的范围。
55.在不冲突的情况下,本公开各实施例及实施例中的各特征可相互组合。
56.如本文所使用的,术语“和/或”包括一个或多个相关列举条目的任何和所有组合。
57.本文所使用的术语仅用于描述特定实施例,且不意欲限制本公开。如本文所使用的,单数形式“一个”和“该”也意欲包括复数形式,除非上下文另外清楚指出。还将理解的是,当本说明书中使用术语“包括”和/或“由
……
制成”时,指定存在所述特征、整体、步骤、操作、元件和/或组件,但不排除存在或添加一个或多个其它特征、整体、步骤、操作、元件、组件和/或其群组。
58.除非另外限定,否则本文所用的所有术语(包括技术和科学术语)的含义与本领域普通技术人员通常理解的含义相同。还将理解,诸如那些在常用字典中限定的那些术语应当被解释为具有与其在相关技术以及本公开的背景下的含义一致的含义,且将不解释为具有理想化或过度形式上的含义,除非本文明确如此限定。
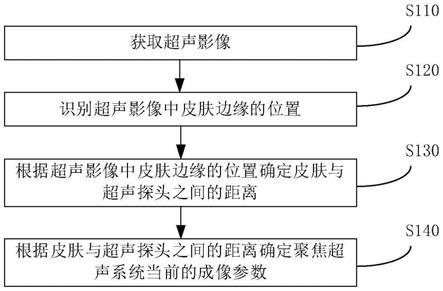
59.作为本公开的第一个方面,提供一种确定聚焦超声系统的成像参数的方法,如图1所示,所述方法包括:
60.在步骤s110中,获取超声影像;
61.在步骤s120中,识别所述超声影像中皮肤边缘的位置;
62.在步骤s130中,根据所述超声影像中皮肤边缘的位置确定皮肤与超声探头之间的距离;
63.在步骤s140中,根据皮肤与超声探头之间的距离确定所述聚焦超声系统当前的成像参数。
64.成像参数多与超声探头与皮肤之间的距离有关。通过步骤s120中对超声影像中皮肤的位置进行识别,可以确定皮肤与超声探头之间的距离。确定了皮肤与超声探头之间的距离之后,即可确定聚焦超声系统当前的成像参数。
65.确定成像参数,就相当于对fus过程进行了监控。可以根据fus操作需求对成像参数进行调整。
66.在本公开中,不需要操作者人为观察,通过对超声图像进行识别即可实现对fus过程的监控。
67.本公开所提供的方法可以由电子设备所执行,无需对市场上现有的超声设备进行改进。也就是说,通过本公开所提供的方法可以以较低的成本实现fus过程中的成像参数监控。
68.在fus过程中,介质与皮肤边缘之间的界限非常明显,在本公开中,对如何识别超声影像中皮肤的位置不做特殊的限定。例如,可以利用边缘检测算法确定超声影像中的皮肤边缘。再例如,可以利用标注后的样本图像对深度学习神经网络模型进行训练,得到训练好的神经网络模型。将接收到的超声影像输入至训练好的神经网络模型后,即可输出超声影像中皮肤边缘的位置信息。
69.对于超声影像而言,超声探头的表面不是在超声影像的顶部,就是在超声影像的底部。确定了皮肤边缘在超声影像中的位置后,即可确定超声探头与皮肤之间的距离。
70.对于聚焦超声系统而言,成像参数包括超声探头的探头功率,下面介绍如何根据皮肤与超声探头之间的距离计算探头功率。
71.通常,超声影像的形状为扇形,其扇角θ和探测深度h(相当于扇形所在圆的半径)是确定的。
72.相应地,超声影像的面积s为:
73.s=1/2*θ*h*h。
74.此时,超声波需要全部穿过超声影像中所示的面积,需要的超声功率p0为:
75.p0=k0*s;
76.其中,k0为包括所述皮肤的生物体(例如,人体)的平均声阻抗系数。
77.通过上述公式,可以计算确定出k0,即,k0=p0/s。
78.当探头离开皮肤的距离为skin_dis后,超声波穿过介质(例如,纯净水)的面积为:
79.sw=1/2*θ*(skin_dis)*(skin_dis);
80.相应地,超声波穿过生物体的面积为:
81.s1=s-sw=1/2*θ*(h*h-skin_dis*skin_dis)。
82.在介质的声阻抗系数为kw时,需要的功率为:
83.p1=k0*s1+kw*sw。
84.也就是说,在所述根据皮肤与超声探头之间的距离生成所述聚焦超声系统当前的成像参数的步骤中,根据以下公式计算所述探头功率:
85.p1=k0*s1+kw*sw;
86.s1=s-sw=1/2*θ*(h*h-skin_dis*skin_dis);
87.sw=1/2*θ*(skin_dis)*(skin_dis);
88.其中,
89.p2为所述探头功率;
90.s1为所述超声影像中,超声波穿透生物体的面积;
91.sw为所述超声影像中超声波穿过介质的面积;
92.θ为所述超声影像的扇角;
93.skin_dis为所述超声探头与皮肤之间的距离;
94.k0为生物体的平均声阻抗系数;
95.kw为探头与皮肤之间的介质的声阻抗系数。
96.纯净水的声阻抗系数近似为0,因此,也可以利用以下公式计算探头功率:
97.p1=k0*s1+0*sw=k0*(1/2*θ*(h*h-skin_dis*skin_dis))。
98.可以根据精度需求选择计算探头功率的公式。
99.在本公开中,k0可以由基础功率计算确定,kw可以根据试验确定。当然,对于不同的超声设备或超声探头,k0、kw会有所不同。
100.对于相控的超声探头而言,除了探头功率之外,所述聚焦超声系统的成像参数包括所述超声探头的成像焦点的位置,在所述根据皮肤与超声探头之间的距离生成所述聚焦超声系统当前的成像参数的步骤中,根据以下公式计算所述成像焦点与超声探头之间的距离:
101.f=(h+skin_dis)/2;
102.其中,h为超声探头的探测深度;
103.skin_dis为所述超声探头与皮肤之间的距离。
104.当计算f<sin_dis时,说明成像焦点在生物体之外,需要对成像焦点进行调节。
105.作为本公开的第二个方面,提供一种聚焦超声系统的控制方法,如图2所示,所述控制方法可以包括:
106.在步骤s210中,接收根据本公开第一方面所提供的方法确定的所述聚焦超声系统当前的成像参数;
107.在步骤s220中,根据预定策略和所述成像参数生成调节信号;
108.在步骤s230中,将所述调节信号提供给所述聚焦超声系统的功能部件。
109.在成像参数已经确定的情况下,可以根据预定策略生成对当前的成像参数进行调节的信号。将所述调节信号提供给所述聚焦超声系统的功能部件后,可以对功能部件进行调节,确保fus的顺利进行。
110.如上文中所述,可以根据当所述超声探头的成像焦点位于所述生物体外部时,根据所述成像参数生成的调节信号包括使得所述超声探头的成像焦点位于所述生物体内部的调节信号。
111.为了减少超声影像上的噪点、以及突出超声影像上的生物组织,在确定了皮肤边缘的位置后,可以将时间增益补偿参数(tgc,time gain compensate)调至最低值,即,根据所述成像参数生成调节信号的步骤中,对所述时间增益补偿参数进行调节包括:
112.将所述时间增益补偿参数调至最低值。
113.这段时间内,tgc参数最低不仅可以减少噪点,还可以使得介质水在最终的超声影像上显示为纯黑色,提高生物组织的成像权重,便于识别生物组织。
114.作为本公开的第三个方面,提供一种图像处理装置,包括:
115.第一存储模块,其上存储有第一可执行程序;
116.一个或多个第一处理器,当所述一个或多个第一处理器调用所述第一可执行程序时,能够实现本公开第一个方面所提供的方法。
117.可选地,图像处理装置还可以包括第一i/o接口,连接在第一处理器与第一存储模块之间,配置为实现第一处理器与第一存储模块的信息交互。
118.其中,第一处理器为具有数据处理能力的器件,其包括但不限于中央处理器(cpu)等;第一存储模块为具有数据存储能力的器件,其包括但不限于随机存取存储器(ram,更具体如sdram、ddr等)、只读存储器(rom)、带电可擦可编程只读存储器(eeprom)、闪存(flash);第一i/o接口(读写接口)连接在第一处理器与第一存储模块间,能实现第一处理器与第一存储模块的信息交互,其包括但不限于数据总线(bus)等。
119.在一些实施例中,第一处理器、第一存储模块和第一i/o接口通过总线相互连接,进而与计算设备的其它组件连接。
120.作为本公开的第四个方面,提供一种控制器,包括:
121.第二存储模块,其上存储有第二可执行程序;
122.一个或多个第二处理器,当所述一个或多个第二处理器调用所述第二可执行程序时,能够实现本公开第二个方面所提供的控制方法。
123.可选地,控制器还可以包括第二i/o接口,连接在第二处理器与第一存储模块之间,配置为实现第二处理器与第二存储模块的信息交互。
124.其中,第二处理器为具有数据处理能力的器件,其包括但不限于中央处理器(cpu)等;第二存储模块为具有数据存储能力的器件,其包括但不限于随机存取存储器(ram,更具体如sdram、ddr等)、只读存储器(rom)、带电可擦可编程只读存储器(eeprom)、闪存(flash);第二i/o接口(读写接口)连接在第二处理器与第二存储模块间,能实现第二处理器与第二存储模块的信息交互,其包括但不限于数据总线(bus)等。
125.在一些实施例中,第二处理器、第二存储模块和第二i/o接口通过总线相互连接,进而与计算设备的其它组件连接。
126.作为本公开的第五个方面,提供一种聚焦超声系统,包括:
127.本公开第三个方面所提供的图像处理装置;
128.本公开第四个方面所提供的所述的控制器;
129.功能部件。
130.如上文中所示,功能部件可以为超声探头。
131.可选地,所述聚焦超声系统还可以包括信息传输接口和影像传输接口,所述信息传输接口设置在所述图像处理装置中,以将所述图像处理装置确定的成像参数传输至所述控制器,所述影像传输接口用于接收超声影像。
132.可选地,影像传输接口具有传输标准信号(例如,vga/dvi/hdmi/sdi)的功能,还可以具有实时传输16位的dicom影像。或者,影像传输接口还可以传输成像rfid信号。
133.在本公开中,聚焦超声系统的功能部件可以包括但不限于超声探头、成像装置等,多个功能部件可以组成超声设备(例如,b超机)等。
134.作为本公开的第六个方面,提供一种计算机可读介质,其上存储有可执行程序,当所述可执行程序被调用时,能够实现本公开的一个方面或第二方面所提供的方法。
135.本领域普通技术人员可以理解,上文中所公开方法中的全部或某些步骤、系统、装置中的功能模块/单元可以被实施为软件、固件、硬件及其适当的组合。在硬件实施方式中,在以上描述中提及的功能模块/单元之间的划分不一定对应于物理组件的划分;例如,一个物理组件可以具有多个功能,或者一个功能或步骤可以由若干物理组件合作执行。某些物理组件或所有物理组件可以被实施为由处理器,如中央处理器、数字信号处理器或微处理器执行的软件,或者被实施为硬件,或者被实施为集成电路,如专用集成电路。这样的软件可以分布在计算机可读介质上,计算机可读介质可以包括计算机存储介质(或非暂时性介质)和通信介质(或暂时性介质)。如本领域普通技术人员公知的,术语计算机存储介质包括在用于存储信息(诸如计算机可读指令、数据结构、程序模块或其它数据)的任何方法或技术中实施的易失性和非易失性、可移除和不可移除介质。计算机存储介质包括但不限于ram、rom、eeprom、闪存或其它存储器技术、cd-rom、数字多功能盘(dvd)或其它光盘存储、磁盒、磁带、磁盘存储或其它磁存储装置、或者可以用于存储期望的信息并且可以被计算机访问的任何其它的介质。此外,本领域普通技术人员公知的是,通信介质通常包含计算机可读指令、数据结构、程序模块或者诸如载波或其它传输机制之类的调制数据信号中的其它数据,并且可包括任何信息递送介质。
136.本文已经公开了示例实施例,并且虽然采用了具体术语,但它们仅用于并仅应当被解释为一般说明性含义,并且不用于限制的目的。在一些实例中,对本领域技术人员显而易见的是,除非另外明确指出,否则可单独使用与特定实施例相结合描述的特征、特性和/或元素,或可与其它实施例相结合描述的特征、特性和/或元件组合使用。因此,本领域技术人员将理解,在不脱离由所附的权利要求阐明的本公开的范围的情况下,可进行各种形式和细节上的改变。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1