一种带紫外线防护结构的消毒机器人的制作方法
1.本实用新型属于消毒机器人技术领域,涉及一种带紫外线防护结构的消毒机器人。
背景技术:
2.随着人们对疫情的防控认知的提高,消毒机器人的作用就彰显出来了,因为消毒机器人能解决大部分场所的病毒消杀工作。消杀机器人主要分为紫外线杀菌和喷洒消毒水杀菌两种方式。
3.目前市场上的消杀机器人种类很多,其中紫外线消杀的机器人因为材料成本低和机器简单易用等优点占据很大一部分市场。但是大多数紫外线消杀机器人都是灯管直接暴露在外,有很多不足之处,主要体现在:
4.1、结构简单,紫外线灯管暴露在外,紫外线容易直接照射到人体产生损害;
5.2、灯管属于易碎品,不加防护容易破裂。
技术实现要素:
6.本实用新型的目的在于克服现有技术的不足,针对紫外线消毒过程中对人体的防护,提供一种可避免紫外线在消毒杀菌过程中对人体产生意外伤害的带紫外线防护结构的消毒机器人。
7.本实用新型的技术方案如下:
8.一种带紫外线防护结构的消毒机器人,它包括连在一起的底座、机身;机身壳体上沿圆周均布设有多个开槽,每个开槽中安装有紫外灯;机身壳体内部设有驱动机构,每个紫外灯外面均安装有旋转门,所述旋转门与驱动机构连接。
9.进一步地,所述的消毒机器人,所述与旋转门连接的驱动机构包括电机驱动器、电机、主动轮、从动轮、传动皮带、惰轮;电机与电机驱动器连接;电机的出轴与主动轮连接(主动轮套装在电机的出轴上);旋转门与从动轮的轴连接(旋转门固定安装在从动轮的轴上);主动轮、惰轮和从动轮均与传动皮带连接;主动轮、惰轮和从动轮均固定安装在机身内的底部圆盘上;所述底部圆盘与底座固定连接;多个惰轮设在底部圆盘的中心部位即圆中心部位,多个从动轮沿圆周均布设置,主动轮设在圆周上,与从动轮呈一定夹角;传动皮带依次连接主动轮、惰轮、从动轮、惰轮和从动轮,传动皮带经过惰轮后改变方向。传动皮带上,在主动轮与从动轮之间,以及前一从动轮与后一从动轮之间,均设有惰轮,惰轮能够改变传动皮带的走动方向,使从动轮的转动方向与主动轮相同。电机驱动器能够控制电机的正反转方向和运转速度。
10.进一步地,机身上面固定安装有消毒水储蓄罐,消毒水储蓄罐上设有若干消毒水喷嘴。
11.进一步地,消毒水储蓄罐底部通过四根支撑柱支撑,这四根支撑柱底部固定在机身内的底部圆盘上。
12.进一步地,从动轮的轴包括分开的上、下两段即上轴、下轴,分别安装在上、下外球面轴承上;上、下外球面轴承分别固定安装在消毒水储蓄罐底部和机身内的底部圆盘上;从动轮的轴的上、下两段即上轴、下轴之间固定连接有旋转门和紫外灯,旋转门呈弧形,罩在紫外灯外面。
13.进一步地,旋转门上下端固定安装有径向端板,分别与从动轮的轴的上、下两段即上轴、下轴固定连接;上、下灯座分别固定安装在旋转门的上下端的径向端板上,处于轴心位置;紫外灯安装在上、下灯座之间。
14.进一步地,从动轮的轴的上、下两段即上轴、下轴分别通过上、下轴套与旋转门上下端的径向端板连接;上轴、下轴端部设有凸块,轴套上设有凹槽,通过将轴端的凸块插入轴套的凹槽中使两者固定连接;旋转门上端的径向端板与上轴套底端固定连接,旋转门下端的径向端板与下轴套顶端固定连接。
15.进一步地,所述的消毒机器人,还包括plc控制器和位置传感器;在机身上每个旋转门旁侧均设有位置传感器;所有位置传感器均与plc控制器的输入端连接;电机驱动器与plc控制器的输出端连接。
16.进一步地,底座面板上设有运行指示灯。
17.进一步地,底座上还设有激光扫描仪。
18.进一步地,底座下面设有行走轮,可行走。
19.本实用新型的有益效果:
20.本实用新型的带紫外线防护结构的消毒机器人,设计了一种针对紫外线消毒过程中对人体防护的紫外线防护结构(防护罩,即旋转门),可避免紫外线在消毒杀菌过程中对人体产生意外的伤害。
21.本实用新型的带紫外线防护结构的消毒机器人,具有以下优点:
22.1、每组灯管都设有防护罩(即旋转门),从结构上避免了紫外光意外照射到人体。
23.2、在运输和移动过程中,防护罩能保护灯管不被轻微的碰撞挤压而破裂。
24.3、机械结构进行了全新的设计,更加稳定,采用一台电机驱动四扇防护罩(即旋转门),提高了防护罩开闭的一致性。
附图说明
25.图1是本实用新型一种带紫外线防护结构的消毒机器人的立体结构示意图;
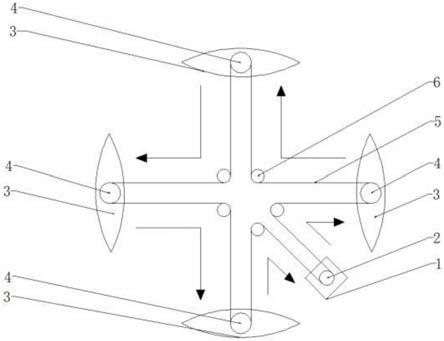
26.图2是本实用新型的消毒机器人的机身内部结构俯视图。
27.图中:1、电机 2、主动轮 3、旋转门 4、从动轮 5、传动皮带 6、惰轮 8、月牙形端板 9、底座 10、机身 11、消毒水喷嘴 12、消毒水储蓄罐 13、外球面轴承 14、紫外灯 15、运行指示灯 16、激光扫描仪
具体实施方式
28.以下结合附图和实施例对本实用新型作进一步的说明。
29.实施例1
30.本实用新型一种带紫外线防护结构的消毒机器人,它包括消毒水喷嘴11、消毒水储蓄罐12、外球面轴承13、紫外灯14、运行指示灯15、激光扫描仪16、旋转门 3、电机1、主动
轮2、旋转门3、从动轮4、传动皮带5、惰轮6。
31.如图1所示,本实用新型所述的消毒机器人,包括连在一起的底座9、机身10;机身10壳体为圆柱形,机身壳体上沿圆周均布设有四个开槽,每个开槽中设有一组紫外灯14,每组紫外灯14包括两根紫外灯管,每组紫外灯14外面均安装有一扇弧形的竖向的旋转门3(即防护罩);机身10上面固定安装有一消毒水储蓄罐12,消毒水储蓄罐12底部通过四根支撑柱支撑,这四根支撑柱底部固定在机身内的底部圆盘上;消毒水储蓄罐12上设有若干消毒水喷嘴11;底座9面板上设有运行指示灯 15;底座9上还设有激光扫描仪16。
32.如图2所示,本实用新型所述的消毒机器人,在机身10壳体内部设有旋转门驱动机构;所述的旋转门驱动机构包括电机驱动器、电机1、主动轮2、从动轮4、传动皮带5、惰轮6;电机1与电机驱动器连接;电机1的出轴与主动轮2连接(主动轮2套装在电机1的出轴上);旋转门3与从动轮4的轴连接(旋转门3固定安装在从动轮4的轴上);主动轮2与传动皮带5连接;五个惰轮6和四个从动轮4也与传动皮带5连接;主动轮、惰轮和从动轮均固定安装在机身10内的底部圆盘上;所述底部圆盘与底座9固定连接;五个惰轮6设在底部圆盘的中心部位即圆中心部位,四个从动轮4沿圆周均布设置,主动轮2设在圆周上,与从动轮4呈一定夹角(与前侧和右侧的从动轮4均呈45度夹角);传动皮带5依次连接主动轮2、惰轮6-1、从动轮4-1、惰轮6-2、从动轮4-2、惰轮6-3、从动轮4-3、惰轮6-4、从动轮4-4、惰轮6-5后回到主动轮2,传动皮带5经过惰轮6后改变方向。传动皮带5上,在主动轮2与从动轮4之间,以及前一从动轮4与后一从动轮4之间,均设有惰轮6,惰轮6能够改变传动皮带5的走动方向,使从动轮4的转动方向与主动轮2相同。电机驱动器能够控制电机1的正反转方向和运转速度。
33.从动轮4的轴包括分开的上、下两段,即上轴、下轴,分别安装在上、下外球面轴承13上;上、下外球面轴承13分别固定安装在消毒水储蓄罐12底部和机身 10内的底部圆盘上;旋转门3上下端固定安装有径向的月牙形端板8(如图1中所示),分别与从动轮4的轴的上、下两段即上轴、下轴固定连接;上、下灯座分别固定安装在旋转门3的上下端的月牙形端板8上,处于轴心位置;上、下灯座之间安装有两根紫外灯管(即紫外灯14,处于轴心位置);亦即,从动轮4的轴的上、下两段是分开的,从动轮4的轴的上、下两段之间固定连接有旋转门3和紫外灯14,旋转门3呈弧形,像个防护罩,罩在紫外灯14外面。从动轮4的轴转动可带动旋转门3转动。图1中的旋转门3为打开状态,看到的是往里凹进去的圆弧形;其旋转 180度后即为关闭状态,看到的是旋转门3的另一面,为往外凸出的圆弧形。
34.从动轮4的轴的上、下两段即上轴、下轴分别通过上、下轴套与旋转门3上下端的月牙形端板8连接;具体连接方式如下:上轴、下轴端部设有凸块,轴套上设有凹槽,通过将轴端的凸块插入轴套的凹槽中,可使两者固定连接;旋转门3上端的月牙形端板8与上轴套底端固定连接,旋转门3下端的月牙形端板8与下轴套顶端固定连接。
35.所述的消毒机器人,还包括plc控制器和位置传感器;在机身上每个旋转门旁侧均设有位置传感器;所有位置传感器均与plc控制器的输入端连接;电机驱动器与plc控制器的输出端连接。
36.所述的消毒机器人,在底座9下面设有行走轮,可行走。
37.本实用新型的带紫外线防护结构的消毒机器人的工作原理如下:
38.当plc控制器给电机驱动器发送正向的定量脉冲信号的时候,电机1开始转动,带动主动轮2开始旋转;主动轮2带动传动皮带5,拖拽着传动皮带5上的所有惰轮6和从动轮4
开始转动;从动轮4转动带动旋转门3转动;根据主动轮2和从动轮4的减速比,当电机1转动一周时,四扇旋转门3刚好转动180度,完成开门动作。
39.当消毒工作完成后,需要关闭旋转门3时,plc控制器给电机驱动器发送反向的定量脉冲信号后,电机1反转一周,带动旋转门3反向旋转一周。
40.当旋转门3由于异常操作没有处于打开或者关闭的情况下,该旋转门驱动机构可以自动回复到原点位(待机位置)。
41.本实用新型所述的消毒机器人,具有以下几种工作模式:
42.(一)紫外灯消毒模式:
43.机器人运行时,首先,plc控制器通过所有位置传感器自检旋转门3是否在待机位置(旋转门3处于关闭状态);如果不在待机位置,则通过驱动模块(即旋转门驱动机构)使其回到待机位置。
44.plc控制器下达消毒指令,则机器人开始运行到开始消毒的位置。通过激光扫描仪16对该点位(待消毒位置)进行识别后,旋转门3开始执行旋转动作。
45.当旋转动作完成,位置传感器二次确认旋转门3打开后,紫外灯14开始点亮进行消毒。
46.保持紫外灯14点亮状态,机器人开始沿着预设好的路径开始行走,让紫外线对路径上的空间进行消毒。
47.完成消毒工作后。到达指定位置关闭紫外灯14,同时关闭旋转门3。回到等待位(待机位置)继续等待新的消毒指令。
48.(二)喷洒消毒模式:
49.因紫外线在消毒过程中会对人体造成损害,所以当消毒空间有人的情况下,紫外消毒是不合适的。在特殊使用环境下,机器人可以在消毒空间内只开启喷洒消毒,使紫外灯14处于关闭状态的同时,旋转门3保持关闭。
50.(三)混合消毒模式:
51.当在无人的环境,对消毒强度要求较高的场所,紫外消毒和喷洒消毒同时进行时,在紫外灯14开始点亮消毒的同时,可一起将喷洒消毒打开,使紫外消毒和喷洒消毒同时进行对细菌的灭活消杀,提高消杀率。
52.本实用新型的带紫外线防护结构的消毒机器人,具有以下优点:
53.1、每组紫外灯管都设有防护罩(即旋转门3),从结构上避免了紫外光意外照射到人体。
54.2、在运输和移动过程中,防护罩(即旋转门3)能保护灯管不被轻微的碰撞挤压而破裂。
55.3、机械结构进行了全新的设计,更加稳定,采用一台电机驱动四扇防护罩(即旋转门3),提高了防护罩开闭的一致性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1