一种下肢假肢扭力器的制作方法
1.本技术涉及假肢的领域,尤其是涉及一种下肢假肢扭力器。
背景技术:
2.假肢是为弥补截肢者或肢体不完全缺损的肢体而专门设计和制作装配的人工假体,又称“义肢”。它的主要作用是代替失去肢体的部分功能,使截肢者恢复一定的生活自理和工作能力。
3.下肢假肢与人体连接时,需要通过扭力器连接,但是现有的扭力器通常仅起到连接的作用,不能随使用者做转体运动时而转动,使用者使用时很不灵活,舒适性较差。
4.针对上述中的相关技术,发明人认为存在有使用者使用扭力器时不灵活,舒适性较差的缺陷。
技术实现要素:
5.为了提高扭力器的灵活性,本技术提供一种下肢假肢扭力器。
6.本技术提供的一种下肢假肢扭力器采用如下的技术方案:
7.一种下肢假肢扭力器,包括上体、设置在上体下方的转动块、转动连接在上体下方的下体、设置在下体内用于使上体和下体相对转动的旋转机构、设置在下体内用于使上体和下体发生相对转动后进行复位的制动调节机构、设置在下体上用于使下体与假肢相连的连接件。
8.通过采用上述技术方案,使用者通过扭力器和连接件将下肢假肢与人体连接后,当使用者做转体运动时,上体和下体可通过旋转机构使两者发生相对转动,从而使使用者做转体运动时更加方便;使用者转体运动完毕后,下体和上体通过制动调节机构自行回转至初始状态;扭力器即能随使用者做转体运动时而转动,又能使使用者在转体运动完毕后及时复位,使用者在使用时较为灵活,提高了使用时的舒适性。
9.可选的,所述旋转机构包括设置在上体和下体之间用于使两者连接的四棱锥接头、两个套设在四棱锥接头上的旋转环、两个分别固设在两个旋转环上的支撑块、设置在上体和下体之间的第一深沟球轴承、设置在四棱锥接头和下体之间的第二深沟球轴承;
10.所述四棱锥接头与上体螺纹连接,两个所述支撑块对称设置,所述转动块位于两个支撑块之间,所述转动块与两个支撑块均抵接,所述支撑块与制动调节机构铰接,所述第二深沟球轴承位于旋转环的下方,所述第二深沟球轴承和旋转环之间设置有使旋转环和第二深沟球轴承分离的垫片。
11.通过采用上述技术方案,使用者做转体运动时,四棱锥接头带动上体和第二深沟球轴承转动,上体带动第一深沟球轴承转动,同时带动转动块转动,转动块带动支撑块转动,支撑块带动与其固定连接的旋转环转动,同时转动块将制动调节机构压缩,从而使上体和下体发生相对转动,最终实现使用者的转体运动;垫片用于使旋转环和第二深沟球轴承分离,防止两者之间产生干扰。
12.可选的,所述四棱锥接头和旋转环之间设置有无油润滑轴承。
13.通过采用上述技术方案,扭力器在使用过程中不易拆卸加油,无油润滑轴承在使用过程中可以不用加油,因此节省大量的安装和运行成本,且提高了使用者使用时的便捷性。
14.可选的,所述支撑块上设置有缓冲块。
15.通过采用上述技术方案,缓冲块较为柔软,受力后易变形,具有缓冲减震的作用。
16.可选的,所述制动调节机构包括两个铰接在旋转机构上的滑动套、设置在滑动套和下体之间的调节螺钉、设置在滑动套和调节螺钉之间的制动调节柱、套设在制动调节柱上的制动调节弹簧,所述滑动套可位于下体内滑移,所述调节螺钉与下体螺纹连接。
17.通过采用上述技术方案,使用者向一侧转体时,旋转机构推动滑动套位于下体内滑移,当制动调节柱同时与滑动套和调节螺钉抵接后,旋转机构不能继续转动;使用者向一侧转体完毕后,制动调节弹簧推动滑动套向远离同侧调节螺钉一侧滑移,最终使滑动套和支撑块自行回转至初始状态;且制动调节弹簧左右独立分开,可通过调节螺钉进行调节弹簧弹力。
18.可选的,所述调节螺钉和下体之间设置有紧定螺钉,所述紧定螺钉与下体螺纹连接,所述紧定螺钉与调节螺钉抵接。
19.通过采用上述技术方案,紧定螺钉可防止调节螺钉产生松动,提高了调节螺钉连接的稳定性。
20.可选的,所述连接件设置为卡箍,所述下体上开设有连接槽。
21.通过采用上述技术方案,使用者通过卡箍将下肢假肢与扭力器连接,卡箍连接操作简单、假肢原有的特性不受影响、安装便捷、且稳定性好、维修方便。
22.可选的,所述上体与转动块一体成型设置。
23.通过采用上述技术方案,一体成型设置连接牢固、强度高、使用稳定。
24.综上所述,本技术包括以下至少一种有益技术效果:
25.1.扭力器即能随使用者做转体运动时而转动,又能使使用者在转体运动完毕后及时复位,使用者在使用时较为灵活,提高了使用时的舒适性;
26.2.旋转机构通过转动块和支撑块可实现双向的旋转,从而使使用者做转体运动时更加灵活,提高了使用者的舒适性;
27.3.调节制动弹簧产生的复位弹力左右独立分开且可调节,可以通过调节螺钉进行调节复位弹力及相应阻力,从而使制动调节机构提供左右双向的复位弹力。
附图说明
28.图1是本技术实施例中扭力器的结构示意图;
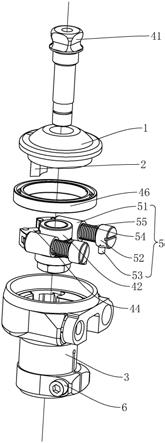
29.图2是表示扭力器的爆炸示意图;
30.图3是表示旋转机构的剖视图;
31.图4是表示转动块和支撑块抵接关系的结构示意图;
32.图5是表示制动调节机构的剖视图;
33.图6是表示制动调节机构的剖视图。
34.附图标记说明:1、上体;2、转动块;3、下体;31、连接槽;4、旋转机构;41、四棱锥接
头;42、旋转环;43、无油润滑轴承;44、支撑块;45、缓冲块;46、第一深沟球轴承;47、第二深沟球轴承;48、垫片;5、制动调节机构;51、滑动套;52、调节螺钉;53、紧定螺钉;54、制动调节柱;55、制动调节弹簧;6、卡箍。
具体实施方式
35.以下结合附图1-6对本技术作进一步详细说明。
36.本技术实施例公开一种下肢假肢扭力器。参照图1和图2,扭力器包括上体1,上体1下方设置有转动块2,转动块2与上体1一体成型设置,上体1的下方转动连接有下体3;下体3内设置有旋转机构4,旋转机构4用于使上体1和下体3相对转动,下体3内设置有制动调节机构5,制动调节机构5用于使上体1和下体3发生相对转动后进行限位和复位作用,下体3远离上体1的侧壁上开设有连接槽31,下体3靠近连接槽31的一端设置有连接件,连接件用于使下体3与假肢相连,连接件设置为卡箍6。
37.使用者通过扭力器和卡箍6将下肢假肢与人体连接后,使用者转体时,人体带动上体1转动,上体1带动旋转机构4转动,从而使上体1和下体3发生相对转动,实现使用者的转体运动;使用者转体运动完毕后,下体3和上体1通过制动调节机构5自行回转至初始状态。
38.参照图3和图4,旋转机构4包括设置在上体1和下体3之间的四棱锥接头41,四棱锥接头41与上体1螺纹连接,四棱锥接头41用于连接上体1和下体3,四棱锥接头41上套设有两个旋转环42, 两个旋转环42相互抵接;四棱锥接头41和旋转环42之间设置有无油润滑轴承43,无油润滑轴承43用于减小四棱锥接头41位于旋转环42内圈转动时的摩擦力;两个旋转环42上分别固设有两个支撑块44,两个支撑块44对称设置,转动块2位于两个支撑块44之间,转动块2与两个支撑块44均抵接,支撑块44与制动调节机构5铰接;每个支撑块44上均设置有缓冲块45,缓冲块45较为柔软,用于对支撑块44起缓冲减震的作用。
39.参照图3和图4,上体1和下体3之间设置有第一深沟球轴承46,第一深沟球轴承46的内圈和外圈分别与上体1和下体3过盈配合,四棱锥接头41和下体3之间设置有第二深沟球轴承47,第二深沟球轴承47的内圈和外圈分别与四棱锥接头41和下体3过盈配合,第二深沟球轴承47位于两个旋转环42的下方,第二深沟球轴承47和旋转环42之间设置有垫片48,垫片48用于使旋转环42和第二深沟球轴承47分离。
40.上体1和下体3发生转动时,首先四棱锥接头41带动上体1、无油润滑轴承43和第二深沟球轴承47转动,上体1带动第一深沟球轴承46转动,同时带动与上体1固定连接的转动块2转动,转动块2带动支撑块44转动,支撑块44带动与其固定连接的旋转环42转动,从而现实了上体1和下体3之间的相对转动。
41.参照图2和图5,制动调节机构5包括两个分别铰接在两个支撑块44上的滑动套51,滑动套51呈内部中空且远离支撑块44的一端开口设置的圆柱体,滑动套51可位于下体3内滑移,滑动套51和下体3之间设置有调节螺钉52,调节螺钉52与下体3螺纹连接,调节螺钉52和下体3之间设置有紧定螺钉53,紧定螺钉53与调节螺钉52垂直,紧定螺钉53与下体3螺纹连接,紧定螺钉53与调节螺钉52抵接。
42.参照图2和图6,滑动套51和调节螺钉52之间设置有制动调节柱54,制动调节柱54用于对支撑块44的转角进行限位,从而使上体1的转动角度左右各为15
°
,制动调节柱54上套设有制动调节弹簧55,制动调节弹簧55两端分别与滑动套51和调节螺钉52抵接,制动调
节弹簧55用于使滑动套51和支撑块44自行回转至初始状态。
43.使用者向一侧转体时,支撑块44推动同侧滑动套51位于下体3内滑移,同时将制动调节弹簧55进行压缩,当制动调节柱54同时与滑动套51和调节螺钉52抵接后,支撑块44不能继续转动,此时下体3转动至最大角度位置;使用者向一侧转体完毕后,在被压缩后的制动调节弹簧55作用下,推动滑动套51向靠近同侧支撑块44的一侧滑移,从而实现上体1和下体3之间的复位。
44.本技术实施例一种下肢假肢扭力器的实施原理为:使用者安装假肢时,通过扭力器和卡箍6将下肢假肢与人体连接,当使用者向一侧做转体运动时,四棱锥接头41带动支撑块44向转体的一侧推动滑动套51位于下体3内滑移,并对制动调节弹簧55进行压缩,从而使上体1和下体3发生相对转动;使用者转体运动完毕后,制动调节弹簧55推动滑动套51,滑动套51带动支撑块44自行恢复至初始状态;扭力器即能随使用者做转体运动时而转动,又能使使用者在转体运动完毕后及时复位,从而使使用者在使用时较为灵活,提高了使用时的舒适性。
45.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1