一种可移动式放疗机器人的制作方法
1.本实用新型涉及一种可移动式放疗机器人,属于机械及放射医疗器材技术领域。
背景技术:
2.放射治疗是当前癌症治疗的三大主要手段之一,按照患者受照状态可分为体外放疗以及术中放疗。体外放疗时,患者处于清醒状态,射线经过皮肤及正常组织到达肿瘤区域,在杀死肿瘤细胞的同时会对正常组织或器官造成一定损伤。术中放疗时,患者处于麻醉状态,肿瘤被手术切除后,射线直接对完全暴露的肿瘤瘤床或残存病灶区进行照射,对正常组织或器官的附带损伤小。体外放疗多采用c型臂直线加速器,通过旋转机架带动直线加速器绕患者旋转,实现射线照射,可实现的空间立体角度范围较小。早期的术中放疗也是基于c型臂直线加速器开展的,患者需要从手术室转运至加速器机房,存在较大的感染风险,因此出现了多种术中专用放射治疗机,如novac7移动式术中放疗装置(美国专利号5635721),mobetron可移动电子直线加速器(美国专利号5321271),intrabeam的移动式术中低能x线机(美国专利号6452177b1),中国实用新型“术中放射治疗机器人”(申请号201921910008.6),中国实用新型“一种移动式放疗机器人”(申请号202021104311.2)。现有体外放疗装置无法移动,不方便开展术中放疗,而现有术中放疗设备mobetron可移动电子直线加速器结构复杂,操作不便,intrabeam的移动式术中低能x线机只能治疗浅表性肿瘤,适应症很窄,通用性差。“术中放射治疗机器人”和“一种移动式放疗机器人”申请公开的术中放疗机器人的束挡器运动机构复杂,临床应用的便利性差。
技术实现要素:
3.为了克服现有技术的不足,本实用新型提供一种可移动式放疗机器人。
4.一种可移动式放疗机器人,底盘的一端分别有左支撑腿及右支撑腿,底盘的另一端为横梁,横梁上连接立柜,滚轮分别连接在左支撑腿及右支撑腿的一端,滚轮还分别连接在横梁的底部两侧,立柜的立架一侧为承载座,承载座连接并联机械臂的定平台,定平台通过若干可伸缩连杆与动平台连接,动平台的后部通过滑动机构与机架连接,束挡器安装在机架下部的束挡器支座上,治疗头安装在机架上部的治疗头支座上,治疗头的下部分别连接限光筒安装座及若干个柔性力引导把手,限光筒安装座连接限光筒。
5.治疗头和束挡器可随机架同步运动,治疗头中心轴正对束挡器中心。
6.滑动机构包括一组或两组正交布置的直线运动单元,能够带动治疗头相对并联机械臂的动平台做一维或二维正交直线运动,每组直线运动单元包括直线导轨、滑块、驱动模块,驱动模块能够带动滑块相对直线导轨滑动,驱动模块是丝杠螺母传动、齿轮齿条传动或皮带传动,驱动模块的动力源为电机、气动或液压驱动。
7.可伸缩连杆上和驱动模块上均装有力传感器。力传感器可感知操作人员作用在柔性力引导把手上的力和力矩,并反馈给机器人运动控制器,机器人运动控制器控制并联机械臂和驱动模块协同运动,实现治疗头围绕虚拟等中心的位置和姿态调整。虚拟等中心是
一空间点,其位置与放疗机器人相对固定。通过合理设定虚拟等中心相对放疗机器人的位置,可获得围绕虚拟等中心的足够大范围的治疗空间,在该空间内,放疗机器人任意部位不会和患者或手术床发生碰撞。
8.承载座相对立柜垂直安装或以其他角度安装。
9.柔性力引导把手可以是环形、u形、l形或直线形。
10.本实用新型的优点是放疗机器人束挡器和治疗头可同步运动,整机结构更加简洁,操作方便,临床应用更加便捷,且具有较好的自屏蔽功能,既可用于实现大立体角度范围的体外放疗,也可用于术中放疗。
11.底盘移动灵活,既可用于体外放疗,也可用于术中放疗;在并联机械臂和滑动机构带动下,治疗头和束挡器可同步运动,整机结构更加简洁实用;并联机械臂和滑动机构具有力反馈功能,可根据作用在扶手上的力进行运动,使限光筒对准瘤床,即实现手动引导下的限光筒柔性摆位;具有一定自屏蔽功能,降低机房防护要求和制造难度。
附图说明
12.当结合附图考虑时,通过参照下面的详细描述,能够更完整更好地理解本实用新型以及容易得知其中许多伴随的优点,但此处所说明的附图用来提供对本实用新型的进一步理解,构成本实用新型的一部分,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定,如图其中:
13.图1为本实用新型的初始待机状态结构之一示意图。
14.图2为本实用新型的初始待机状态结构之二示意图。
15.图3为本实用新型的底盘结构示意图。
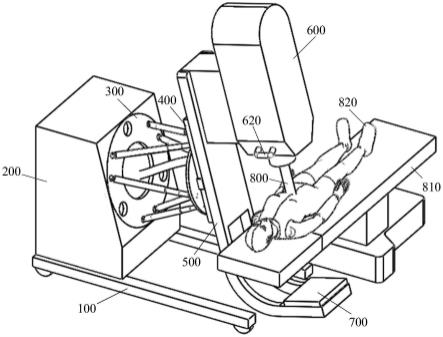
16.图4为本实用新型进行术中放疗时的使用状态示意图。
17.底盘100,左支撑腿110,右支撑腿120,滚轮130,横梁140,立柜200,立架210,承载座220,并联机械臂300,定平台310,动平台320,滑动机构400,滑块410,滑轨420,驱动模块430,机架500,治疗头支座510,束挡器支座520,治疗头600,限光筒安装座610,扶手620,束挡器700,限光筒800。
18.下面结合附图和实施例对本实用新型进一步说明。
具体实施方式
19.显然,本领域技术人员基于本实用新型的宗旨所做的许多修改和变化属于本实用新型的保护范围。
20.本技术领域技术人员可以理解,除非特意声明,这里使用的单数形式“一”、“一个”、“所述”和“该”也可包括复数形式。应该进一步理解的是,本实用新型的说明书中使用的措辞“包括”是指存在所述特征、整数、步骤、操作、元件和/或组件,但是并不排除存在或添加一个或多个其他特征、整数、步骤、操作、元件、组件和/或它们的组。应该理解,当称元件、组件被“连接”到另一元件、组件时,它可以直接连接到其他元件或者组件,或者也可以存在中间元件或者组件。这里使用的措辞“和/或”包括一个或更多个相关联的列出项的任一单元和全部组合。
21.本技术领域技术人员可以理解,除非另外定义,这里使用的所有术语(包括技术术
语和科学术语)具有与所属领域中的普通技术人员的一般理解相同的意义。
22.为便于对实施例的理解,下面将结合做进一步的解释说明,且各个实施例并不构成对本实用新型的限定。
23.实施例1:如图1、图2、图3及图4所示,一种可移动式放疗机器人,底盘100的一端分别有左支撑腿110及右支撑腿120,底盘100的另一端为横梁140,横梁140上连接立柜200,滚轮130分别连接在左支撑腿110及右支撑腿120的一端,滚轮130还分别连接在横梁140的底部两侧,立柜200的立架210一侧为承载座220,承载座220连接机械臂300的定平台310,定平台310通过若干可伸缩连杆与动平台320连接,动平台320的后部与滑动机构400的滑块410连接,滑块410与滑轨420匹配连接,滑动机构400与机架500的束挡器支座520连接,束挡器支座520的下部有治疗头支座510,治疗头支座510与束挡器700连接,束挡器支座520的上部与治疗头600连接,治疗头600的下部分别连接限光筒安装座610及扶手620,驱动模块430连接滑动机构400,限光筒安装座610连接限光筒800。
24.机器人运动控制器连接在立柜200内部,机器人运动控制器通过线缆连接机械臂和滑动机构上的驱动模块430。
25.传感器连接扶手620,传感器可感知操作人员作用在柔性力引导扶手620上的力和力矩,并反馈给机器人运动控制器,机器人运动控制器控制连接机械臂300和驱动模块430协同运动,实现治疗头600围绕虚拟等中心的位置和姿态调整。
26.虚拟等中心是一空间点,其位置与放疗机器人相对固定。
27.通过合理设定虚拟等中心相对放疗机器人的位置,可获得围绕虚拟等中心的足够大范围的治疗空间,在该空间内,放疗机器人任意部位不会和患者或手术床发生碰撞。
28.实施例2:如图1、图2、图3及图4所示,一种可移动式放疗机器人,包括底盘100、立柜200、并联机械臂300、滑动机构400、机架500、治疗头600、束挡器700、限光筒800。
29.其中,立柜200固定在底盘100的一端,并联机械臂300一端安装在立柜200上,并联机械臂300另一端通过滑动机构400与机架500连接,治疗头600安装在机架500的上端,束挡器700与治疗头600正对低安装在机架500的下端,限光筒800安装在治疗头600下方。
30.底盘100包括左支撑腿110、右支撑腿120及滚轮130。其中左支撑腿110及右支撑腿120通过横梁140固定连接,四个滚轮130分别安装在横梁140、左支撑腿110及右支撑腿120的下方,滚轮130可以是普通万向轮,也可以是托特纳姆轮。
31.立柜200包括立架210和承载座220,立架210固定安装在底盘100上,立架210上方的承载座220用于安装并联机械臂300的定平台310。
32.并联机械臂300具有多个运动自由度,如六个运动自由度,三个方向的平移,绕空间三坐标轴的旋转。
33.滑动机构400包括滑块410、滑轨420和驱动模块430,滑块410和滑轨420分别安装在并联机械臂300的动平台320和机架500上,滑动机构400与机架500的束挡器支座520连接,驱动模块430安装在机架500上并可带动滑块410相对滑轨420滑动,从而实现机架500相对并联机械臂300的滑动,驱动模块430可以是丝杠螺母传动,也可是齿轮齿条传动或皮带传动,驱动模块430的动力源可以是电机,也可以是气动或液压驱动。
34.机架500包括治疗头支座和束挡器支座,治疗头600固定安装在治疗头支座上,束挡器700固定安装在束挡器支座上,治疗头600中心轴正对束挡器700中心。治疗头600的下
部分别连接限光筒安装座610。
35.治疗头600用于产生放疗用的射线,治疗头600末端设有限光筒安装座,用于限光筒800和治疗头600的快速连接,治疗头600下方装有一个或两个或多个扶手620,方便操作人员引导治疗头600摆位。
36.束挡器700为一中间厚边缘薄的重金属板,如铅板。
37.肿瘤切除后,患者瘤床处于暴露状态,首先将放疗机器人移动至患者附近,使瘤床中心位于虚拟等中心附近,然后大夫选择合适的限光筒800,并将其安装在机头末端的限光筒安装座上,之后通过扶手620作用在机头上一定的引导力,滑动机构400和并联机械臂300上的力传感器感知相应的引导力后动作,使得机架500带动治疗头600和束挡器700同步运动,将限光筒800对准瘤床并保持其位姿,完成限光筒800摆位,最后治疗头600出束,对患者820位于瘤床810上进行照射,完成术中放疗。
38.可以理解的是,放疗机器人同样可用于外照射放疗,即将放疗机器人移动至肿瘤患者附近,利用并联机械臂和滑动机构带动机架从而带动治疗头和束挡器同步运动,对患者肿瘤靶区实施大立体角度范围的照射治疗。
39.实施例3:如图1、图2、图3及图4所示,一种可移动式放疗机器人,底盘可电控移动,便于放疗机器人移动至不同房间实施放疗,实现大立体角度范围的放射治疗,特别是术中放射治疗,具有柔性引导功能,降低放射治疗特别是术中放射治疗的操作难度,提高实施效率和精度,束挡器和治疗头同步运动,具有一定的自屏蔽功能,降低对治疗场所(如手术室和机房)的屏蔽要求。
40.底盘通过底部滚轮可带动放疗机器人进行前后左右平移。
41.并联机械臂可带动机架及其上的治疗头和束挡器实现多自由度同步运动,如三个平移和三个旋转运动。
42.滑动机构可带动机架及其上的治疗头和束挡器同步地相对并联机械臂的动平台相对滑动,从而调整限光筒相对瘤床的位置。
43.治疗头下方装有若干个扶手,方便操作人员引导治疗头运动,实现限光筒摆位。
44.治疗头末端设有限光筒安装座,便于限光筒的快速装配。
45.如上所述,对本实用新型的实施例进行了详细地说明,但是只要实质上没有脱离本实用新型的发明点及效果可以有很多的变形,这对本领域的技术人员来说是显而易见的。因此,这样的变形例也全部包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1