一种基于二自由度闭环运动的辅助上床装置
1.本实用新型涉及辅助上床领域,尤其是涉及一种基于二自由度闭环运动的辅助上床装置。
背景技术:
2.生活中,很多特殊的病人和老人因为腿脚不便无法便捷地上下床,最新数据显示,中国的老龄人口已经有两亿六千万,根据2019年统计的总人口14亿来算,约占总人口的18.57%,且仍有继续上涨的趋势。然而我国的养老服务政策还不够完善,更多老年人倾向于居家养老方式。国内老年人的起居辅助产品较少,适老化的起居产品市场潜力巨大。老年人生理机能不断退化,腿部灵活性下降,导致上下床不方便。随着以上问题的日益突出,让老人安全、便捷的上下床必须得到妥善解决。
3.目前国内市场已有的帮助抬腿的机构,但多数为简单的扶手结构。国外市场有电动的,装于床侧的抬腿装置,只需要坐在床侧,按下命令按钮,机器便能够将腿抬到床上。但是国内的过于简易,不能帮助老人抬腿便捷地上床,而国外的过于昂贵,一部需要四千多美元,一般家庭的老人消费不起,不能够帮助到大多数的老人。且每种床需要的机器型号不同,普适性强。
技术实现要素:
4.本实用新型的目的就是为了克服上述现有技术存在的缺陷而提供一种基于二自由度闭环运动的辅助上床装置。
5.本实用新型的目的可以通过以下技术方案来实现:
6.一种基于二自由度闭环运动的辅助上床装置,包括第一支撑架、第二支撑架、支撑架连接杆、控制器和抬腿组件,所述的第一支撑架、第二支撑架竖直相对设置,所述的支撑架连接杆的两端分别与第一支撑架、第二支撑架的底端固定连接,
7.所述的抬腿组件包括第一步进电机、转动臂、提升臂、提升连杆、万向节、轴承座、抬升板和抬升底座,所述的第一步进电机固定设于第一支撑架的顶端,所述的转动臂与提升臂呈夹角设置,所述的转动臂的一端与第一步进电机的输出端固定连接,另一端与所述提升臂的一端固定连接,所述的提升臂的另一端可转动安装于第二支撑架的顶端,所述的抬升底座活动卡设于提升臂上,所述的抬升板安装于抬升底座上,所述的轴承座固定设于支撑架连接杆上,所述的提升连杆的一端通过万向节与轴承座上的轴承可转动连接,另一端通过万向节与抬升底座固定连接,所述的第一步进电机与控制器电性连接。
8.优选地,所述的转动臂、提升臂的夹角为60度。
9.优选地,所述的辅助上床装置还包括第二步进电机,所述的第二步进电机固定安装于抬升底座上,所述的第二步进电机的输出轴与抬升板固定连接。
10.优选地,所述的辅助上床装置还包括两个定位夹紧组件,所述的定位夹紧组件分别设于第一支撑架、第二支撑架上,所述的定位夹紧组件包括c型卡板、安装螺丝和定位螺
丝,所述的c型卡板的侧面开设有安装螺孔,一个定位夹紧组件的安装螺丝穿过第一支撑架后螺接于安装螺孔内,另一个定位夹紧组件的安装螺丝穿过第二支撑架后螺接于安装螺孔内,所述的c型卡板的底面开设有定位螺孔,所述的定位螺丝螺接于定位螺孔内。
11.优选地,所述的辅助上床装置还包括力臂连接件,所述的力臂连接件上开设有第一力臂槽和第二力臂槽,所述的转动臂的自由端固定插设于第一力臂槽内,所述的提升臂的自由端固定插设于第二力臂槽内,所述的转动臂、提升臂通过力臂连接件固定连接。
12.优选地,所述的抬升板包括水平支撑板和侧面挡板,所述的侧面挡板垂直设于水平支撑板的一侧。
13.优选地,所述的辅助上床装置还包括上床扶手,所述的上床扶手与第一支撑架固定连接。
14.优选地,所述的辅助上床装置还包括可调节脚撑,所述的可调节脚撑的顶端与第一支撑架固定连接,所述的可调节脚撑的底端与地面抵触。
15.优选地,所述的辅助上床装置还包括显示器,所述的显示器与控制器电性连接。
16.优选地,所述的提升连杆为弯臂连杆。
17.优选地,所述的弯臂连杆的弯臂夹角为150度。
18.现有技术相比,本实用新型具有如下优点:
19.(1)本实用新型利用简单的机械结构实现二自由度闭环运动装置,能够稳定可靠的实现抬升板的抬升,将使用者的双腿抬升至床面高度或将使用者双腿从床面高度放下,能够帮助使用者安全便捷的上下床,便于独自上下床活动,减少腿部的负担和上下床时间;
20.(2)本实用新型利用定位夹紧组件实现装置与床的可拆卸固定连接,安装简单快捷,稳定性强,提高本装置的普适性,并利用可调节脚撑结构进一步提高本实用新型的稳定性;
21.(3)本实用新型的抬升板利用第二步进电机实现转动,能够进一步配合抬升动作实现腿部的旋转抬升,提高使用者的舒适度和便捷程度,利用上床扶手结构进一步稳定使用者的身体,确保使用过程的安全性;
22.(4)本实用新型利用显示器进行操作控制,降低操作难度,提高使用便捷性。
附图说明
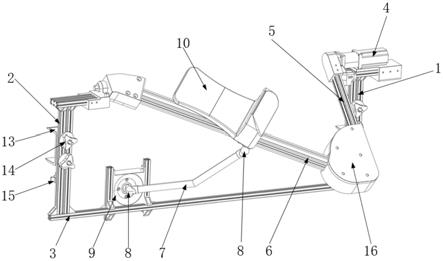
23.图1为本实用新型的整体结构示意图;
24.图2为本实用新型的拆卸抬升板后的结构示意图;
25.图3为带有上床扶手、显示器和可调节脚撑的本实用新型的结构示意图;
26.图4为本实用新型的抬升板的结构示意图;
27.图5为本实用新型的转动臂、力臂连接件、提升臂的结构示意图;
28.图6为本实用新型的力臂连接件的结构示意图;
29.图7为本实用新型的抬升底座与提升臂的连接结构示意图;
30.图8为本实用新型的定位夹紧组件的结构示意图;
31.图9为本实用新型使用时抬升板放下的结构示意图;
32.图10为本实用新型使用时抬升板升起的结构示意图。
33.其中,1、第一支撑架,2、第二支撑架,3、支撑架连接杆,4、第一步进电机,5、转动
臂,6、提升臂,7、提升连杆,8、万向节,9、轴承座,10、抬升板,11、抬升底座,12、第二步进电机,13、c型卡板,14、安装螺丝,15、定位螺丝,16、力臂连接件,17、第一力臂槽,18、第二力臂槽,19、水平支撑板,20、侧面挡板,21、上床扶手,22、可调节脚撑,23、显示器,24、底座滑槽,25、滑动卡轮。
具体实施方式
34.下面结合附图和具体实施例对本实用新型进行详细说明。注意,以下的实施方式的说明只是实质上的例示,本实用新型并不意在对其适用物或其用途进行限定,且本实用新型并不限定于以下的实施方式。
35.实施例
36.一种基于二自由度闭环运动的辅助上床装置,如图1~3所示,包括第一支撑架1、第二支撑架2、支撑架连接杆3、控制器和抬腿组件,第一支撑架1、第二支撑架2竖直相对设置,支撑架连杆的两端分别与第一支撑架1、第二支撑架2的底端固定连接。
37.如图1、2所示,抬腿组件设于第一支撑架1、第二支撑架2之间,抬腿组件包括第一步进电机4、转动臂5、提升臂6、提升连杆7、万向节8、轴承座9、抬升板10和抬升底座11,第一步进电机4固定设于第一支撑架1的顶端,转动臂5与提升臂6呈夹角设置,转动臂5的一端与第一步进电机4的输出端固定连接,另一端与所述提升臂6的一端固定连接,提升臂6的另一端可转动安装于第二支撑架2的顶端,抬升底座11活动卡设于提升臂6上,抬升板10安装于抬升底座11上,轴承座9固定设于支撑架连接杆3上,提升连杆7的一端通过万向节8与轴承座9上的轴承可转动连接,另一端通过万向节8与抬升底座11固定连接,第一步进电机4与控制器电性连接。
38.如图7所示,本实施例中,提升臂6上开设有底座滑槽24,抬升底座11的底部固定设有滑动卡轮25,滑动卡轮25活动卡设于底座滑槽24内。
39.本实施例中,提升连杆7为弯臂连杆,其弯臂夹角为150度。
40.使用时,第一步进电机4运行带动转动臂5转动,转动臂5带动提升臂6转动,提升臂6转动时,提升连杆7带动抬升底座11在提升臂6的限制下上移动。
41.本实施例中,转动臂5、提升臂6的夹角为60度,转动臂5的长度为45cm,提升臂6的长度为70cm。
42.另外,所述的提升臂6的另一端可通过轴承结构可转动安装于第二支撑架9的顶端。
43.如图4所示,本实施例中,抬升板10包括水平支撑板19和侧面挡板20,侧面挡板20垂直设于水平支撑板19的一侧,为了便于抬升板10上升过程中旋转,配合实现对腿部的辅助抬升,辅助上床装置还包括第二步进电机12,第二步进电机12固定安装于抬升底座11上,第二步进电机12的输出轴与抬升板10固定连接。使用时,第一步进电机4运行带动提升底座11上升,第二步进电机12运行带动抬升板10转动。
44.本实施例中,第一步进电机4、第二步进电机12均为行星减速步进电机。
45.如图1、8所示,本实施例中,为了实现对不同种类床的适配,完成本实用新型的安装和固定,辅助上床装置还包括两个定位夹紧组件,定位夹紧组件分别设于第一支撑架1、第二支撑架2上,定位夹紧组件包括c型卡板13、安装螺丝14和定位螺丝15,c型卡板13的侧
面开设有安装螺孔,一组定位夹紧组件的安装螺丝14穿过第一支撑架1后螺接于安装螺孔内,另一组定位夹紧组件的安装螺丝14穿过第二支撑架2后螺接于安装螺孔内,c型卡板13的底面开设有定位螺孔,定位螺丝15螺接于定位螺孔内。安装螺丝14、定位螺丝15均为梅花手拧螺丝,便于人工调整。
46.本实施例中,c型卡板13上开设有两个安装螺孔,每个c型卡板13上安装两个安装螺丝14。
47.如图5、6所示,为了便于本实用新型的安装和固定,辅助上床装置还包括力臂连接件16,力臂连接件16上开设有第一力臂槽17和第二力臂槽18,转动臂5的自由端固定插设于第一力臂槽17内,提升臂6的自由端固定插设于第二力臂槽18内,转动臂5、提升臂6通过力臂连接件16固定连接。
48.另外,为了便于使用者使用时对身体进行稳定支撑,辅助上床装置还包括上床扶手21,上床扶手21与第一支撑架1固定连接。
49.本实用新型安装时,为了与高度不同的地面相适配,辅助上床装置还包括可调节脚撑22,可调节脚撑22的顶端与第一支撑架1固定连接,可调节脚撑22的底端与地面抵触。
50.辅助上床装置还包括显示器23,显示器23与控制器电性连接。本实施例中显示器23为可触摸显示器,配合控制器实现对本实用新型启动、停止,复位的控制。
51.具体地,本实用新型使用时,使用者先坐在床上,将腿靠在抬升板10上,利用显示器23配合控制器启动辅助上床装置,第一步进电机4运行,带动转动臂5、提升臂6转动,抬升底座11在提升连杆7的牵拉下沿提升臂6上升,上升过程中,第二步进电机12运行,带动抬升板10转动,最终抬升板到达床面的高度,状态如图9所示,并与床紧贴,实现辅助上床功能;当使用者需要下床时,将腿放在抬升板10上,利用显示器23配合控制器启动辅助上床装置的下床功能,第二步进电机4运行,带动转动臂5、提升臂6转动,抬升底座11在提升连杆7的牵拉下沿提升臂6下降,最后状态如图10所示。使用过程中,使用者均可以利用上床扶手21进行身体的稳定。
52.本实用新型安装时,将定位夹紧组件的c型卡板13的卡口与床板卡设,然后拧紧定位螺丝15使定位夹紧组件与床板固定连接,调节可调节脚撑22的高度,使其与地面抵触。
53.上述实施方式仅为例举,不表示对本实用新型范围的限定。这些实施方式还能以其它各种方式来实施,且能在不脱离本实用新型技术思想的范围内作各种省略、置换、变更。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1