基于经穴疗法的四自由度绕神阙穴揉腹运动仿生机械手
1.本实用新型涉及一种仿生机械手,特别涉及一种基于经穴疗法的四自由度绕神阙穴揉腹运动仿生机械手。
背景技术:
2.目前,肥胖是多种代谢性疾病的始动因素,胰岛细胞代偿性分泌导致胰岛素过高是胰岛素抵抗、ⅱ型糖尿病的早期特征,造成β细胞衰竭,加速糖尿病进程。临床研究发现,绕神阙穴揉腹运动手法具有多重功效,针对血糖、血脂、高胰岛素等具有明显疗效,而为此进行了以肥胖ⅱ型糖尿病胰岛素抵抗模型大鼠为研究对象的实验,为了获得胰岛素抵抗指数、胰岛素敏感指数以及糖脂代谢等相关指标,需要对实验操作人员进行手法频度、力度的规范,甚至需要一定的临床推拿经验,对实验人员的要求较高,而且在运用、推广至临床实验时又需要一定数量的医师进行实践,因此为了解决人员数量不足以及规范手法质量的问题,设计基于经穴疗法的四自由度绕神阙穴揉腹运动仿生机械手系统对进一步研究中医推拿手法的作用机制和其推广具有重要意义。
技术实现要素:
3.本实用新型的目的是为了解决在ⅱ型糖尿病的早期治疗时所采用的按摩治疗常常出现的治疗人员手法不规范以及人手不足的问题,而提供的一种基于经穴疗法的四自由度绕神阙穴揉腹运动仿生机械手。
4.本实用新型提供的基于经穴疗法的四自由度绕神阙穴揉腹运动仿生机械手包括有滑台、定位架、按摩振动板和控制器,其中滑台装配在定位架中心的安装口内,滑台内螺接有第一螺杆和第二螺杆,第一螺杆和第二螺杆上下交错呈垂直方向螺接在滑台内,定位架的左右两侧的侧壁上对称开设有第一滑槽,第一螺杆的两端分别枢接在定位架左右两侧的第一滑槽内,第一螺杆的两端能够在定位架左右两侧的第一滑槽内进行滑动,定位架的前后两侧的侧壁上对称开设有第二滑槽,第二螺杆的两端分别枢接在定位架前后两侧的第二滑槽内,第二螺杆的两端能够在定位架前后两侧的第二滑槽内滑动,第一螺杆的一端连接有第一驱动电机,第一驱动电机带动第一螺杆进行转动,第一螺杆转动的过程中驱使滑台进行左右移动,第二螺杆的一端连接有第二驱动电机,第二驱动电机带动第二螺杆进行转动,第二螺杆转动的过程中驱使滑台进行前后移动,定位架一侧的侧壁上螺接有第三螺杆,第三螺杆的一端连接有第三驱动电机,第三驱动电机带动第三螺杆进行转动,第三螺杆转动的过程中驱使定位架和滑台进行上下移动,滑台的中心部位枢接有第四驱动电机,第四驱动电机的传动轴上连接有驱动机构,按摩振动板装配在驱动机构的底端,第四驱动电机通过驱动机构驱使按摩振动板进行震动按摩,第一驱动电机、第二驱动电机、第三驱动电机和第四驱动电机均与控制器相连接,第一驱动电机、第二驱动电机、第三驱动电机和第四驱动电机由控制器控制工作。
5.滑台和定位架均装配在支撑罩内,控制器装配在支撑罩的顶端,定位架的侧壁上
还装配有滑块,对应滑块位置的支撑罩内壁上设置有导轨,滑块卡接在导轨的滑槽内,滑块能够在导轨的滑槽内进行上下移动,第三驱动电机通过底座也固连在支撑罩的内壁上。
6.滑台内与第一螺杆同一水平面上与第一螺杆平行穿设有第一导向杆,滑台能够沿第一导向杆进行滑动,第一导向杆的两端也分别枢接在定位架左右两侧的第一滑槽内,第一导向杆的两端能够在定位架左右两侧的第一滑槽内滑动,滑台内与第二螺杆同一水平面上与第二螺杆平行穿设有第二导向杆,滑台能够沿第二导向杆进行滑动,第二导向杆的两端也分别枢接在定位架前后两侧的第二滑槽内,第二导向杆的两端能够在定位架前后两侧的第二滑槽内滑动。
7.定位架相邻两侧的侧壁上分别装配有第一激光测距仪和第二激光测距仪,定位架前端的侧壁上还装配有拉线测距仪,第一激光测距仪、第二激光测距仪和拉线测距仪均与控制器相连接,第一激光测距仪、第二激光测距仪和拉线测距仪能够把采集的滑台和定位架的位移数据实时传输给控制器,控制器根据第一激光测距仪、第二激光测距仪和拉线测距仪传输的位移数据控制第一驱动电机、第二驱动电机和第三驱动电机的工作。
8.第一驱动电机、第二驱动电机、第三驱动电机和第四驱动电机均为步进电机。
9.第四驱动电机传动轴上连接的驱动机构包括有第一输出轴和第二输出轴,其中第一输出轴的顶端与第四驱动电机的传动轴相连接,第一输出轴的底端枢接在倾角传动块的一端,第二输出轴的顶端枢接在倾角传动块的另一端,第二输出轴的底端连接有横杆,横杆的两端分别装配有滑套,横杆两端的滑套分别套设在两个滑杆上,滑套能够在滑杆上进行上下滑动,两个滑杆的顶端固定在滑台的底部,第二输出轴的下部还固连有两个支撑杆,两个支撑杆的底端固定在按摩振动板的顶面上,第四驱动电机通过第一输出轴、倾角传动块、第二输出轴和两个支撑杆带动按摩振动板进行振动按摩,第一输出轴的中心轴对应横杆的中心部位进行装配。
10.按摩振动板上装配有电加热丝为按摩振动板进行加热,电加热丝与控制器中的电源进行连接并由该电源提供电力,按摩振动板的底部装配有温度传感器和拉压力传感器,温度传感器和拉压力传感器与控制器相连接,温度传感器和拉压力传感器能够把采集的数据实时传输给控制器,控制器根据温度传感器的传输数据控制电源为按摩振动板上的电加热丝提供电力,控制器根据拉压力传感器传输的数据控制第四驱动电机的工作。
11.控制器是由中央处理器、电源、第一电机驱动器、第二电机驱动器、第三电机驱动器和第四电机驱动器组成,中央处理器分别与电源、第一电机驱动器、第二电机驱动器、第三电机驱动器和第四电机驱动器相连接并控制电源、第一电机驱动器、第二电机驱动器、第三电机驱动器和第四电机驱动器的工作,电源还与第一电机驱动器、第二电机驱动器、第三电机驱动器和第四电机驱动器相连接并为第一电机驱动器、第二电机驱动器、第三电机驱动器和第四电机驱动器提供电力,中央处理器是由plc组成,中央处理器还分别与第一激光测距仪、第二激光测距仪、拉线测距仪、温度传感器和拉压力传感器相连接,第一激光测距仪、第二激光测距仪、拉线测距仪、温度传感器和拉压力传感器通过a/d转换将采集的数据传送给中央处理器,第一电机驱动器与第一驱动电机相连接并控制第一驱动电机的工作,第二电机驱动器与第二驱动电机相连接并控制第二驱动电机的工作,第三电机驱动器与第三驱动电机相连接并控制第三驱动电机的工作,第四电机驱动器与第四驱动电机相连接并控制第四驱动电机的工作。
12.上述的第一驱动电机、第二驱动电机、第三驱动电机、第四驱动电机、第一激光测距仪、第二激光测距仪、拉线测距仪、温度传感器、拉压力传感器、中央处理器、电源、第一电机驱动器、第二电机驱动器、第三电机驱动器和第四电机驱动器均为现有设备的组装,因此,具体型号和规格没有进行赘述。
13.本实用新型的工作原理如下:
14.本实用新型提供的基于经穴疗法的四自由度绕神阙穴揉腹运动仿生机械手在工作时控制器指令电源给按摩振动板上的电加热丝供电进行加热,通过按摩振动板上的温度传感器传递信号至控制器,控制器进行按摩振动板的恒温控制,此时第一驱动电机和第二驱动电机运转控制按摩振动板恢复初始位置,第四驱动电机低速运转,按摩振动板上的拉压力传感器采集压力数据传送给控制器,控制器通过对压力数据峰值进行分析,与预设压力峰值进行比较,并将处理的信号反馈给第三驱动电机,由拉线测距仪实时采集滑台和定位架的纵向位移信息并反馈至控制器,控制器对定位架进行纵向定位,控制器通过对两组压力数据的峰值差距进行分析并将控制信号反馈给第一驱动电机和第二驱动电机,由第一激光测距仪和第二激光测距仪记录第一驱动电机和第二驱动电机的实时位移信息并反馈至控制器,控制器对滑台进行定位,控制器将两组压力的数据峰值差值控制在要求范围内,第四驱动电机加大功率提高至工作转速,通过第一输出轴、倾角传动块和第二输出轴控制按摩振动板的旋转,使按摩振动板在改变倾角的同时能维持其长轴线与两个滑杆组成的平面的夹角在一定范围内往复变化,实现标准、持久的揉腹手法动作的准确、稳定输出。
15.控制器的具体工作如下:
16.第一、第三驱动电机执行输出的竖直位移由控制器内的中央处理器实施闭环控制,首先进行系统初始化,设定系统所需压力的峰值大小,与按摩振动板上的拉压力传感器实时采集得到的经a/d转换得到的压力峰值信号作比较,虽然控制误差理论值为0时为最优,但根据实践经验和实际情况,只要当前时刻误差在允许范围内,系统即可认定满足控制要求,当误差超出允许范围,系统进行模糊pid算法计算,除已知当前时刻误差e(k)外,计算误差变化率ec(k)=e(k)-e(k-1),二者作为控制器输入,同时将当前时刻误差赋值给上一时刻,即e(k)=e(k-1),而后模糊化控制器输入e(k)、ec(k),对参数δkp、δki、δkd进行模糊整定,其中,δkp、δki、δkd分别为消除pid控制比例系数kp、积分系数ki及微分系数kd三者偏差的校正参数,而后基于初始值叠加得到pid控制参数的当前值kp、ki、kd,最终得到控制信号输出,中央处理器控制第三电机驱动器产生具有时序控制的电流来驱动第三驱动电机维持机构在一较稳定的高度。
17.第二、第一驱动电机和第二驱动电机执行输出的水平位移同样由控制器内的中央处理器实施闭环控制,首先进行初始设定,即拉压力传感器的数据峰值偏差在允许范围,与拉压力传感器实时采集得到的经a/d转换得到的压力峰值信号偏差作比较,系统进行模糊pid算法计算,具体过程同上,最终得到输出,中央处理器控制第一电机驱动器和第二电机驱动器产生相应具有时序控制的电流来驱动第一驱动电机和第二驱动电机进而控制滑台的水平位置,当系统三维坐标趋于稳定后,中央处理器控制第四电机驱动器输出时序控制电流来驱动第四驱动电机,最终实现揉腹仿生手的(恒温)动作输出。
18.本实用新型的有益效果:
19.本实用新型提供的基于经穴疗法的四自由度绕神阙穴揉腹运动仿生机械手采用
步进电机驱动,输出转速和转矩能很好的控制和规范,规避了人为操作时可能产生的疲劳而降低揉腹手法的频数和力度的问题;本实用新型实现了对揉腹手法的精准模拟,包括手法中一些关键要素例如倾斜角度、按压力度、作用范围等的规范与再现解决了传统人工需要长时间的训练和实习才能达到专家手法标准的要求的问题;本实用新型结构精简、易于安装、便于运输和存放,操作简单,为中医推拿揉腹手法的推广和宣传提供了极大的便利和可能性,也为科学、严谨的对揉腹手法的作用机制的探索实验的数据获取提供了统一的、稳定的装置来实现实验过程从而获取令人信服的实验数据和结果,为中医推拿走出国门走向国际奠定坚实基础,做出重要贡献;本实用新型的零件设计简单,机械加工工序少,使用材料产量大,生产成本较低,其次机构具有一定强度,能在长期、高强度使用中保持不发生形变,确保动作的精度和速度,保证对标准动作的高度还原。本实用新型智能化仿真程度较高,采用多种位移传感器和力传感器采集大量位移和力的数据并通过外部控制中心处理后反馈信号给步进电机从而对机器进行实时精确定位和运动输出,通过温度传感器对电热丝进行恒温控制,模拟人手温度,能给按摩对象带来更完美的体验。
附图说明
20.图1为本实用新型所述的滑台和定位架连接结构示意图。
21.图2为本实用新型所述的仿生机械手内部结构示意图。
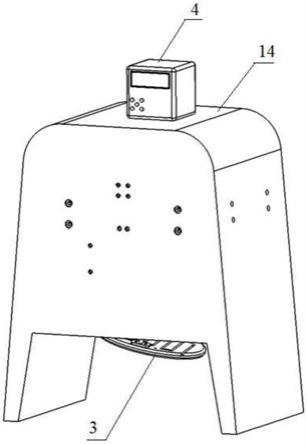
22.图3为本实用新型所述的仿生机械手整体结构示意图。
23.图4为本实用新型所述的第四驱动电机连接的驱动机构分解示意图。
24.图5为本实用新型所述的按摩振动板仰视示意图。
25.图6为本实用新型所述的控制器连接关系结构框图。
26.图7为本实用新型所述的控制器工作原理示意图。
27.上图中的标注如下:
28.1、滑台2、定位架3、按摩振动板4、控制器5、第一螺杆
29.6、第二螺杆7、第一滑槽8、第二滑槽9、第一驱动电机
30.10、第二驱动电机11、第三螺杆12、第三驱动电机
31.13、第四驱动电机14、支撑罩15、滑块16、导轨17、底座
32.18、第一导向杆19、第二导向杆20、第一激光测距仪
33.21、第二激光测距仪22、拉线测距仪23、第一输出轴
34.24、第二输出轴25、倾角传动块26、横杆27、滑套28、滑杆
35.29、支撑杆30、电源31、温度传感器32、拉压力传感器
36.33、中央处理器34、第一电机驱动器35、第二电机驱动器
37.36、第三电机驱动器37、第四电机驱动器。
具体实施方式
38.请参阅图1至图7所示:
39.本实用新型提供的基于经穴疗法的四自由度绕神阙穴揉腹运动仿生机械手包括有滑台1、定位架2、按摩振动板3和控制器4,其中滑台1装配在定位架2中心的安装口内,滑台1内螺接有第一螺杆5和第二螺杆6,第一螺杆5和第二螺杆6上下交错呈垂直方向螺接在
滑台1内,定位架2的左右两侧的侧壁上对称开设有第一滑槽7,第一螺杆5的两端分别枢接在定位架2左右两侧的第一滑槽7内,第一螺杆5的两端能够在定位架2左右两侧的第一滑槽7内进行滑动,定位架2的前后两侧的侧壁上对称开设有第二滑槽8,第二螺杆6的两端分别枢接在定位架2前后两侧的第二滑槽8内,第二螺杆6的两端能够在定位架2前后两侧的第二滑槽8内滑动,第一螺杆5的一端连接有第一驱动电机9,第一驱动电机9带动第一螺杆5进行转动,第一螺杆5转动的过程中驱使滑台1进行左右移动,第二螺杆6的一端连接有第二驱动电机10,第二驱动电机10带动第二螺杆6进行转动,第二螺杆6转动的过程中驱使滑台1进行前后移动,定位架2一侧的侧壁上螺接有第三螺杆11,第三螺杆11的一端连接有第三驱动电机12,第三驱动电机12带动第三螺杆11进行转动,第三螺杆11转动的过程中驱使定位架2和滑台1进行上下移动,滑台1的中心部位枢接有第四驱动电机13,第四驱动电机13的传动轴上连接有驱动机构,按摩振动板3装配在驱动机构的底端,第四驱动电机13通过驱动机构驱使按摩振动板3进行震动按摩,第一驱动电机9、第二驱动电机10、第三驱动电机12和第四驱动电机13均与控制器4相连接,第一驱动电机9、第二驱动电机10、第三驱动电机12和第四驱动电机13由控制器4控制工作。
40.滑台1和定位架2均装配在支撑罩14内,控制器4装配在支撑罩14的顶端,定位架2的侧壁上还装配有滑块15,对应滑块15位置的支撑罩14内壁上设置有导轨16,滑块15卡接在导轨16的滑槽内,滑块15能够在导轨16的滑槽内进行上下移动,第三驱动电机12通过底座17也固连在支撑罩14的内壁上。
41.滑台1内与第一螺杆5同一水平面上与第一螺杆5平行穿设有第一导向杆18,滑台1能够沿第一导向杆18进行滑动,第一导向杆18的两端也枢接在定位架2左右两侧的第一滑槽7内,第一导向杆18的两端能够在定位架2左右两侧的第一滑槽7内滑动,滑台1内与第二螺杆6同一水平面上与第二螺杆6平行穿设有第二导向杆19,滑台1能够沿第二导向杆19进行滑动,第二导向杆19的两端也分别枢接在定位架2前后两侧的第二滑槽8内,第二导向杆19的两端能够在定位架2前后两侧的第二滑槽8内滑动。
42.定位架2相邻两侧的侧壁上分别装配有第一激光测距仪20和第二激光测距仪21,定位架2前端的侧壁上还装配有拉线测距仪22,第一激光测距仪20、第二激光测距仪21和拉线测距仪22均与控制器4相连接,第一激光测距仪20、第二激光测距仪21和拉线测距仪22能够把采集的滑台1和定位架2的位移数据实时传输给控制器4,控制器4根据第一激光测距仪20、第二激光测距仪21和拉线测距仪22传输的位移数据控制第一驱动电机9、第二驱动电机10和第三驱动电机12的工作。
43.第一驱动电机9、第二驱动电机10、第三驱动电机12和第四驱动电机13均为步进电机。
44.第四驱动电机13传动轴上连接的驱动机构包括有第一输出轴23和第二输出轴24,其中第一输出轴23的顶端与第四驱动电机13的传动轴相连接,第一输出轴23的底端枢接在倾角传动块25的一端,第二输出轴24的顶端枢接在倾角传动块25的另一端,第二输出轴24的底端连接有横杆26,横杆26的两端分别装配有滑套27,横杆26两端的滑套27分别套设在两个滑杆28上,滑套27能够在滑杆28上进行上下滑动,两个滑杆28的顶端固定在滑台1的底部,第二输出轴24的下部还固连有两个支撑杆29,两个支撑杆29的底端固定在按摩振动板3的顶面上,第四驱动电机13通过第一输出轴23、倾角传动块25、第二输出轴24和两个支撑杆
29带动按摩振动板3进行振动按摩,第一输出轴23的中心轴对应横杆26的中心部位进行装配。
45.按摩振动板3上装配有电加热丝为按摩振动板3进行加热,电加热丝与控制器4中的电源30进行连接并由该电源30提供电力,按摩振动板3的底部装配有温度传感器31和拉压力传感器32,温度传感器31和拉压力传感器32与控制器4相连接,温度传感器31和拉压力传感器32能够把采集的数据实时传输给控制器4,控制器4根据温度传感器31的传输数据控制电源30为按摩振动板3上的电加热丝提供电力,控制器4根据拉压力传感器32传输的数据控制第四驱动电机13的工作。
46.控制器4是由中央处理器33、电源30、第一电机驱动器34、第二电机驱动器35、第三电机驱动器36和第四电机驱动器37组成,中央处理器33分别与电源30、第一电机驱动器34、第二电机驱动器35、第三电机驱动器36和第四电机驱动器37相连接并控制电源30、第一电机驱动器34、第二电机驱动器35、第三电机驱动器36和第四电机驱动器37的工作,电源30还与第一电机驱动器34、第二电机驱动器35、第三电机驱动器36和第四电机驱动器37相连接并为第一电机驱动器34、第二电机驱动器35、第三电机驱动器36和第四电机驱动器37提供电力,中央处理器33是由plc组成,中央处理器33还分别与第一激光测距仪20、第二激光测距仪21、拉线测距仪22、温度传感器31和拉压力传感器32相连接,第一激光测距仪20、第二激光测距仪21、拉线测距仪22、温度传感器31和拉压力传感器32通过a/d转换将采集的数据传送给中央处理器33,第一电机驱动器34与第一驱动电机9相连接并控制第一驱动电机9的工作,第二电机驱动器35与第二驱动电机10相连接并控制第二驱动电机10的工作,第三电机驱动器36与第三驱动电机12相连接并控制第三驱动电机12的工作,第四电机驱动器37与第四驱动电机13相连接并控制第四驱动电机13的工作。
47.上述的第一驱动电机9、第二驱动电机10、第三驱动电机12、第四驱动电机13、第一激光测距仪20、第二激光测距仪21、拉线测距仪22、温度传感器31、拉压力传感器32、中央处理器33、电源30、第一电机驱动器34、第二电机驱动器35、第三电机驱动器36和第四电机驱动器37均为现有设备的组装,因此,具体型号和规格没有进行赘述。
48.本实用新型的工作原理如下:
49.本实用新型提供的基于经穴疗法的四自由度绕神阙穴揉腹运动仿生机械手在工作时控制器4指令电源30给按摩振动板3上的电加热丝供电进行加热,通过按摩振动板3上的温度传感器31传递信号至控制器4,控制器4进行按摩振动板3的恒温控制,此时第一驱动电机9和第二驱动电机10运转控制按摩振动板3恢复初始位置,第四驱动电机13低速运转,按摩振动板3上的拉压力传感器32采集压力数据传送给控制器4,控制器4通过对压力数据峰值进行分析,与预设压力峰值进行比较,并将处理的信号反馈给第三驱动电机12,由拉线测距仪22实时采集滑台1和定位架2的纵向位移信息并反馈至控制器4,控制器4对定位架2进行纵向定位,控制器4通过对两组压力数据的峰值差距进行分析并将控制信号反馈给第一驱动电机9和第二驱动电机10,由第一激光测距仪20和第二激光测距仪21记录第一驱动电机9和第二驱动电机10的实时位移信息并反馈至控制器4,控制器4对滑台1进行定位,控制器4将两组压力的数据峰值差值控制在要求范围内,第四驱动电机13加大功率提高至工作转速,通过第一输出轴23、倾角传动块25和第二输出轴24控制按摩振动板3的旋转,使按摩振动板3在改变倾角的同时能维持其长轴线与两个滑杆28组成的平面的夹角在一定范围
内往复变化,实现标准、持久的揉腹手法动作的准确、稳定输出。
50.控制器4的具体工作如下:
51.第一、第三驱动电机12执行输出的竖直位移由控制器4内的中央处理器33实施闭环控制,首先进行系统初始化,设定系统所需压力的峰值大小,与按摩振动板3上的拉压力传感器32实时采集得到的经a/d转换得到的压力峰值信号作比较,虽然控制误差理论值为0时为最优,但根据实践经验和实际情况,只要当前时刻误差在允许范围内,系统即可认定满足控制要求,当误差超出允许范围,系统进行模糊pid算法计算,除已知当前时刻误差e(k)外,计算误差变化率ec(k)=e(k)-e(k-1),二者作为控制器4输入,同时将当前时刻误差赋值给上一时刻,即e(k)=e(k-1),而后模糊化控制器4输入e(k)、ec(k),对参数δkp、δki、δkd进行模糊整定,其中,δkp、δki、δkd分别为消除pid控制比例系数kp、积分系数ki及微分系数kd三者偏差的校正参数,而后基于初始值叠加得到pid控制参数的当前值kp、ki、kd,最终得到控制信号输出,中央处理器33控制第三电机驱动器36产生具有时序控制的电流来驱动第三驱动电机12维持机构在一较稳定的高度。
52.第二、第一驱动电机9和第二驱动电机10执行输出的水平位移同样由控制器4内的中央处理器33实施闭环控制,首先进行初始设定,即拉压力传感器32的数据峰值偏差在允许范围,与拉压力传感器32实时采集得到的经a/d转换得到的压力峰值信号偏差作比较,系统进行模糊pid算法计算,具体过程同上,最终得到输出,中央处理器33控制第一电机驱动器34和第二电机驱动器35产生相应具有时序控制的电流来驱动第一驱动电机9和第二驱动电机10进而控制滑台1的水平位置,当系统三维坐标趋于稳定后,中央处理器33控制第四电机驱动器37输出时序控制电流来驱动第四驱动电机13,最终实现揉腹仿生手的(恒温)动作输出。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1