可弯折镊子的制作方法
1.本实用新型属于个人卫生清洁技术领域,更具体地说,是涉及可弯折镊子。
背景技术:
2.现有技术的镊子在使用时其一般都是通过人工操作来控制镊子的开合和关闭,进而夹取及夹持目标物,其操作严重依赖于操作者的经验和镊子的可操作性;现有的大部分镊子为刚性材料制作,因此镊子为固定状态,不可弯折,导致现有的镊子难以在口腔、耳道或肠道等复杂工况进行操作,无法根据工况去调整镊子的弯折角度和夹持角度。
技术实现要素:
3.本实用新型的目的在于提供一种可弯折镊子,旨在解决现有的镊子无法在复杂工况下进行角度调节的问题。
4.本实用新型是这样实现的:
5.一种可弯折镊子,包括壳体、旋转连接于所述壳体一端的第一夹持臂、旋转连接于所述壳体的端部并与所述第一夹持臂形成夹持结构的第二夹持臂、控制所述第一夹持臂和所述第二夹持臂开合的控制组件,且所述第一夹持臂和所述第二夹持臂转动连接;
6.所述控制组件包括抵接于所述第一夹持臂与所述第二夹持臂之间并用于驱动所述第一夹持臂和所述第二夹持臂张开的开合件、滑移连接于所述第一夹持臂和所述第二夹持臂且在滑移时控制所述第一夹持臂和所述第二夹持臂闭合的推块及驱动所述推块移动的驱动组件;
7.所述可弯折镊子还包括与所述壳体远离所述第一夹持臂的一端连接的可弯曲连接棒。
8.进一步地,所述驱动组件包括与所述推块连接并用于拉动所述推块以驱动所述第一夹持臂和所述第二夹持臂闭合的拉线及驱动所述拉线的驱动机构,所述拉线穿设于所述可弯曲连接棒中。
9.进一步地,所述可弯曲连接棒包括与所述壳体连接的柔性基体以及设于所述柔性基体内部的定位肋条;所述拉线沿所述柔性基体的轴线方向穿过所述柔性基体后与所述推块连接。
10.进一步地,所述开合件为弹性件,所述弹性件包括c型部和分别设于所述c型部的两端的第一支撑部和第二支撑部;
11.所述壳体上穿设有供所述第一夹持臂和第二夹持臂转动连接的转轴,所述c型部套接于所述转轴上;
12.所述第一支撑部弹性抵接于所述第一夹持臂靠近所述壳体的一端,所述第二支撑部弹性抵接于所述第二夹持臂靠近所述壳体的一端,所述第一夹持臂朝向所述第二夹持臂的一侧凹设有容置所述第一支撑部的第一收纳槽,所述第二夹持臂朝向所述第一夹持臂的一侧凹设有容置所述第二支撑部的第二收纳槽。
13.进一步地,所述壳体上设有供所述第一夹持臂和第二夹持臂转动连接的转轴;
14.所述开合件包括第一磁性件和与所述第一磁性件相斥的第二磁性件;
15.所述第一磁性件设于所述第一夹持臂远离所述壳体的一端;
16.所述第二磁性件设于所述第二夹持臂远离所述壳体的一端并与所述第一磁性件相对设置。
17.进一步地,所述可弯曲连接棒远离所述壳体的一侧连接有机体,所述机体内设有主板模块、与所述主板模块电连接的电池,,所述驱动机构与所述主板模板电连接;
18.所述驱动机构包括与所述拉线远离所述推块的一端连接的轴套和与所述轴套螺接的驱动电机,所述驱动电机驱动所述轴套沿所述驱动电机的输出轴的轴线方向往复运动。
19.进一步地,所述可弯曲连接棒内嵌设有摄像组件;
20.所述摄像组件包括位于所述可弯曲连接棒靠近所述壳体的一端的内窥镜和穿设于所述可弯曲连接棒并与所述内窥镜电连接的柔性电路板,所述柔性电路板与所述主板模块电连接;
21.所述第一夹持臂和所述第二夹持臂在张开和闭合状态时均位于所述内窥镜的摄像区域内。
22.进一步地,所述内窥镜的镜片上附着有用于防尘防雾的镀膜层。
23.进一步地,所述主板模块上电连接有陀螺仪。
24.进一步地,所述主板模块和所述柔性电路板上均附着有纳米防水层。
25.一种镊子组件,包括上述可弯折镊子以及与所述主板模块通讯连接的智能终端设备,所述主板模块上设置有用于将所述摄像组件拍摄的图像形成图像信号并将该所述图像信号发送至所述智能终端设备的图像成像处理模块,所述智能终端设备上设置有调节模块;所述调节模块用于根据所述智能终端设备接收到的所述图像信号,向所述主板模块发送调节所述第一夹持臂、所述第二夹持臂之间的闭合角度的调节指令,所述主板模块根据所述调节指令控制所述驱动电机的旋转方向与旋转速度以控制所述可弯折镊子的闭合角度。
26.本实用新型的有益效果在于:
27.通过拉动推块控制第一夹持臂和第二夹持臂所形成的夹持结构进行夹持动作;当拉动推块,第一夹持臂和第二夹持臂闭合,当松开推块,设置在第一夹持臂和第二夹持臂之间的开合件驱动第一夹持臂和第二夹持臂张开,简化了驱动第一夹持臂和第二夹持臂开合的步棸;通过拉线穿过可弯曲连接棒并与推块连接,以实现当需要进入口腔、耳道或肠道这类复杂工况时,可弯曲连接棒弯折至所需角度,实现夹持结构相对可弯折镊子的手持角度的调节,以便于使用者进行复杂工况的夹持动作,并且装配在可弯曲连接棒上的夹持结构被拉线拉动时,不仅可将弯曲连接棒作为其受力支撑点,又使得弯曲连接棒能够有效保护口腔等部位难以被拉线伤害,同时也能使得拉线与可弯曲连接棒可同步弯折。
附图说明
28.图1是本实用新型实施例提供的可弯折镊子的结构示意图;
29.图2是本实用新型实施例提供的可弯折镊子的可弯曲连接棒的结构示意图;
30.图3是图2的横截面结构示意图;
31.图4是本实用新型实施例提供的可弯折镊子的可弯曲连接棒和夹持结构的结构示意图一;
32.图5是本实用新型实施例提供的可弯折镊子的可弯曲连接棒和夹持结构的结构示意图二;
33.图6是本实用新型实施例提供的可弯折镊子的可弯曲连接棒、摄像组件和夹持结构的结构示意图;
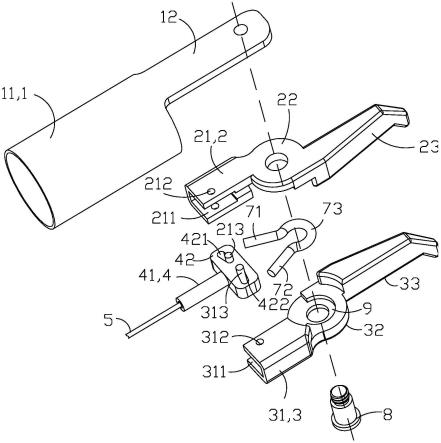
34.图7是本实用新型实施例提供的可弯折镊子的夹持结构的爆炸结构示意图一;
35.图8是本实用新型实施例提供的可弯折镊子的夹持结构的爆炸结构示意图二;
36.图9是本实用新型实施例提供的可弯折镊子的夹持结构的爆炸结构示意图三;
37.图10是本实用新型实施例提供的镊子组件的结构示意图。
38.1、壳体;11、固定筒;12、固定板;
39.2、第一夹持臂;21、第一滑移部;211、第一收纳槽;212、第一固定孔;213、第一滑移杆;22、第一旋转部;23、第一夹持部;
40.3、第二夹持臂;31、第二滑移部;311、第二收纳槽;312、第二固定孔;313、第二滑移杆;32、第二旋转部;33、第二夹持部;
41.4、推块;41、推杆;42、滑移块;421、第一腰型孔;422、第二腰孔孔;
42.5、拉线;
43.6、可弯曲连接棒;61、柔性基体;611、装配孔;612、穿设孔;613、通孔;62、定位肋条;
44.71、第一支撑部;72、第二支撑部;73、c型部;
45.8、固定杆;
46.9、收容腔体;
47.10、第一磁性件;
48.20、第二磁性件;
49.30、机体;
50.40、主板模块;
51.50、电池;
52.60、驱动机构;601、轴套;602、驱动电机;
53.70、摄像组件;701、内窥镜;702、柔性电路板;
54.80、智能终端设备;90、图像成像处理模块;100、调节模块。
具体实施方式
55.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
56.需要说明的是,当元件被称为“固定于”或“设置于”另一个元件,它可以直接在另一个元件上或者可能同时存在居中元件。当一个元件被称为“连接于”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。
57.还需要说明的是,本实施例中的左、右、上、下等方位用语,仅是互为相对概念或是以产品的正常使用状态为参考的,而不应该认为是具有限制性的。
58.如图1至图4所示,一种可弯折镊子,包括壳体1、旋转连接于壳体1一端的第一夹持臂2、旋转连接于壳体1的端部并与第一夹持臂2形成夹持结构的第二夹持臂3、控制第一夹持臂2和第二夹持臂3开合的控制组件(图中未标记),且第一夹持臂2和第二夹持臂3转动连接,以通过控制组件控制第一夹持臂2和第二夹持臂3实现自动张开与闭合的目的。
59.控制组件包括抵接于第一夹持臂2与第二夹持臂3之间并用于驱动第一夹持臂2和第二夹持臂3张开的开合件(图中未标记)、滑移连接于第一夹持臂2和第二夹持臂3且在滑移时控制第一夹持臂2和第二夹持臂3闭合的推块4及驱动推块4移动的驱动组件(图中未标记),通过驱动组件驱动推动4朝向驱动组件移动时,以控制第一夹持臂2和第二夹持臂3实现自动闭合,并通过配合开合件,实现当驱动组件驱动推块4远离驱动组件移动时,开合件驱动第一夹持臂2和第二夹持臂3自动张开,并带动推块4复位,上述驱动方式,简化了驱动第一夹持臂2和第二夹持臂3开合的步棸;
60.可弯折镊子还包括与壳体1远离第一夹持臂2的一端连接的可弯曲连接棒6,通过设置可弯曲连接棒6,实现可弯折镊子在其夹持结构相对其人手握持的角度调节,以便于可弯折镊子在口腔、耳道和肠道等复杂工况的角度调节。
61.如图4至图6,壳体1上连接有可弯曲连接棒6,拉线5穿过可弯曲连接棒6,以实现当需要进入口腔、耳道和肠道等复杂工况时,可弯曲连接棒6弯折至所需角度,实现夹持结构相对可弯折镊子的手持角度的调节,以便于使用者进行复杂工况的夹持动作;将拉线5穿设可弯曲连接棒6,使得装配在可弯曲连接棒6上的夹持结构在被拉线5拉动时,不仅可弯曲连接棒6能够作为其受力支撑点,而且可弯曲连接棒6能够有效保护口腔、耳道和肠道等人体内部结构难以被拉线5伤害,同时也使得拉线5能够与可弯曲连接棒6同步弯折。
62.如图2、图3和图5所示,可弯曲连接棒6包括与壳体1连接的柔性基体61以及设于柔性基体61内部的定位肋条62;拉线5沿柔性基体61的轴线方向穿设于柔性基体61。
63.在柔性基体61内设置定位肋条62,以利用柔性基体61和定位肋条62的可弯曲性,有效保证了可弯曲连接棒6的可弯曲性能。利用定位肋条62的可定形的效果,一方面,在一定程度地减小可弯曲连接棒6在外力作用下的弯曲幅度,另一方面,可使得可弯曲连接棒6弯曲后,且在外力撤除后可定形,在一定程度上减少可弯曲连接棒6在使用过程中出现频繁、大幅度的弯曲现象的发生,有效的提高可弯曲连接棒6的使用寿命;拉线5穿设于柔性基体61内,以达到拉线5与柔性基体61同步弯折的目的。
64.作为一具体实施例,如图2和图3,柔性基体61可采用pvc材质制作而成,定位肋条62可采用铁丝制成,其中柔性基体61与定位肋条62等长设置;柔性基体61的一端的端部上凹陷开设有用于嵌入内窥镜701的装配孔611和沿柔性基体61的长度方向贯穿柔性基体61的穿设孔612,该穿设孔612以便于柔性电路板702穿设装配,且穿设孔612与装配孔611同轴设置,柔性基体61上还开设有沿柔性基体61的轴线贯穿柔性基体61的通孔613,拉线5穿过于通孔613;定位肋条62的数量为至少一个,本实施例中采用了两个平行于柔性基体61轴线的定位肋条62。
65.如图7和图8所示,开合件为弹性件(图中未标记),以弹性撑开闭合的第一夹持臂2和第二夹持臂3,从而实现自动张开第一夹持臂2和第二夹持臂3;壳体1上设有穿设第一夹
持臂2和第二夹持臂3的固定杆8,且第一夹持臂2和第二夹持臂3以固定杆8为旋转中心,弹性件的一端弹性抵接于第一夹持臂2远离固定杆8的一端,另一端弹性抵接于第二夹持臂3远离固定杆8的一端,使得弹性件弹性撑开第一夹持臂2和第二夹持臂3靠近壳体1的一端时,第一夹持臂2和第二夹持臂3远离壳体1的一端张开。
66.第一夹持臂2和第二夹持臂3拼合形成有用于收纳弹性件的收容腔体9,以达到将弹性件收纳至第一夹持臂2和第二夹持臂3内,能够保护弹性件难以被损坏。
67.作为一具体实施例,如图7和图8所示,第一夹持臂2包括依次连接的第一滑移部21、第一旋转部22和第一夹持部23;第二夹持臂3包括依次连接的第二滑移部31、第二旋转部32和第二夹持部33;第一滑移部21相对于第二滑移部31的侧壁上凹陷设置有第一收纳槽211和沿第一滑移部21厚度方向贯穿第一滑移部21并与第一收纳槽211连通的第一固定孔212;第二滑移部31相对于第一滑移部21的侧壁上凹陷设置有第二收纳槽311和沿第二滑移部31厚度方向贯穿第二滑移部31并与第二收纳槽311连通的第二固定孔312。
68.推块4呈“t”型设置,其包括推杆41和滑移块42;滑移块42上设置有第一腰型孔421和第二腰型孔422,且第一腰型孔421与第二腰型孔422呈“八”字型设置;第一滑移部21上设有穿过第一固定孔212和第一腰型孔421的第一滑移杆213,且第一滑移杆213的端部固定于第一固定孔212内,第一滑移杆213滑移连接于第一腰型孔421内;第二滑移部31上设有穿过第二固定孔312和第二腰型孔422的第二滑移杆313,且第二滑移杆313的端部固定于第二固定孔312内,第二滑移杆313滑移连接于第二腰型孔422内。
69.壳体1包括套接于可弯曲连接棒6上的固定筒11和连接于固定筒11远离可弯曲连接棒6一端的固定板12;固定杆8的一端固定连接于固定板12上,另一端穿设第一旋转部22和第二旋转部32,使得第一夹持臂2以第一旋转部22为旋转中心旋转,第二夹持臂3以第二旋转部32为旋转中心旋转,且第一旋转部22和第二旋转部32拼合后其内部具有收纳弹性件的收容腔体9。
70.当第一夹持臂2和第二夹持臂3需要闭合时,拉动推块4,推块4通过联动第一滑移杆213和第二滑移杆313,使得第一夹持臂2和第二夹持臂3以固定杆8为中心相对转动,驱动第一夹持部23和第二夹持部33相向移动,完成闭合动作。
71.具体地,弹性件包括c型部73和分别设于c型部73的两端的第一支撑部71和第二支撑部72;壳体1上穿设有供第一夹持臂2和第二夹持臂3转动连接的转轴8,c型部73套接于转轴8上;第一支撑部71弹性抵接于第一夹持臂2靠近壳体1的一端,第二支撑部72弹性抵接于第二夹持臂3靠近壳体1的一端,第一夹持臂2朝向第二夹持臂3的一侧凹设有容置第一支撑部71的第一收纳槽211,第二夹持臂3朝向第一夹持臂2的一侧凹设有容置第二支撑部73的第二收纳槽311。
72.如图9所示,作为开合件的另一种实施例,壳体1上设有穿设第一夹持臂2和第二夹持臂3的固定杆8,且第一夹持臂2和第二夹持臂3以固定杆8为旋转中心;开合件包括第一磁性件10和与第一磁性件10相斥的第二磁性件20;第一磁性件10设于第一夹持臂2远离壳体1的一端;第二磁性件20设于第二夹持臂3远离壳体1的一端并与第一磁性件10相对设置,设置相互排斥的第一磁性件10和第二磁性件20,以实现当推块4拉动第一夹持臂2和第二夹持臂3闭合的力消失后,第一磁性件10和第二磁性件20将第一夹持臂2和第二夹持臂3张开。
73.如图4至图6所示,可弯曲连接棒6远离壳体1的一侧连接有机体30,机体30内还设
有主板模块40、与主板模块40电连接的电池50,以及与主板模块40电连接并拉动拉线5的驱动机构60,以达到主板模块40控制驱动机构60的目的,且机体30内具有储存电量的电池50,使得可弯折镊子能够在不外接电源的情况下使用。
74.如图5和图6所示,驱动机构60包括与拉线5远离推块4的一端连接的轴套601和驱动轴套601并与轴套601螺接的驱动电机602,驱动电机602驱动轴套601沿驱动电机602的输出轴朝向驱动电机602移动,当主板模块40控制驱动电机602驱动轴套601在驱动电机602的输出轴上朝驱动电机602移动时,轴套601带动拉线5朝向驱动电机602移动,拉线5拉动推块4,达到通过主板模块40控制第一夹持臂2和第二夹持臂3的闭合角度的目的。
75.在本实施例中,当第一夹持臂2和第二夹持臂3闭合时,驱动电机602驱动轴套601朝向驱动电机602方向移动为拉动拉线5以第一夹持臂2和第二夹持臂3闭合。当第一夹持臂2和第二夹持臂3张开时,驱动电机602驱动轴套601背离驱动电机602,与此同时开合件驱动第一夹持臂2和第二夹持臂3张开,并且在本实施例中,可以通过驱动电机602驱动轴套601的移动行程,控制第一夹持臂2和第二夹持臂3的张开角度。
76.如图4-6和图10所示,可弯曲连接棒6内设有摄像组件70,以使得可弯折镊子具有图像采集的功能,在进行夹持动作的同时实现实时图像传输,便于用户进行夹持动作时能够观察其工作环境的具体工况。
77.摄像组件70包括位于可弯曲连接棒6靠近壳体1的一端的内窥镜701和穿设可弯曲连接棒6并与内窥镜701电连接的柔性电路板702,柔性电路板702与主板模块40电连接;通过内窥镜701进行实时图像采集,所采集的实时图像信息通过柔性电路板702传输至主板模块40内,通过主板模块40与外接智能终端设备80将该实时图像信息传输至智能终端设备80上,以达到用户操作可弯折镊子进行夹持动作时能够同步观察夹持工况以及工况环境。
78.夹持结构位于内窥镜701的摄像区域内,使得可弯折镊子的夹持动作均在实时图像采集区域内,以便于深入人体的耳道、鼻腔或喉咙等狭窄空间内的镊子进行工作。
79.如图4至图6所示,内窥镜701的镜片上附着有防尘防雾的镀膜层,当内窥镜701深入人体的耳道、鼻腔或喉咙等狭窄空间时,因上述工作环境存在液体,因此在内窥镜701的镜片上进行镀膜处理,以有效减少液体附着内窥镜701上,进而减少因液体附着而导致显示至智能终端设备80的实时图像不清晰的情况,同时内窥镜701的镜片具有防尘功能,一方面,以在最大程度上减少因内窥镜701上的灰尘导致人体感染的情况发生,另一方面,进而提升内窥镜701所采集的实时图像的清晰度。
80.如图4-6和图10所示,主板模块40上电连接有陀螺仪(图中未示出)。本实施例中,主板模块40设有wifi芯片,wifi芯片发射出wifi信号用于连接外部智能终端设备80,与智能终端设备80连接后能够把可弯折镊子的实时图像信息传输到智能终端设备80中,陀螺仪对转动、偏转的动作做很好的测量,可以精确分析判断出使用者的实际动作,可以根据动作,可以对智能终端设备80做相应的操作,陀螺仪检测到可弯曲连接棒6抖动、转动的角度,然后根据角度来算出机器需要补偿的距离或角度,使镜头在手机上显示图像保持原来的方向和角度,这样使得使用者在使用具有陀螺仪的可弯折镊子时能够精准定点进行夹持动作,便于用户使用。
81.主板模块40和柔性电路板702上均附着有纳米防水涂层,纳米防水涂层是一种透明薄膜纳米涂料,厚度为50-800纳米,约为人类头发直径千分之一。纳米防水涂层低凸的表
面可以吸附周围的气体分子,形成一层稳定的薄膜气垫,避免了主板模块40的表面、柔性电路板702的表面、贴片于主板模块40和柔性电路板702上的电子元器件与水分子的直接接触。在主板模块40的表面和柔性电路板702的表面形成极细微的网状膜层,有效降低主板模块40的表面、柔性电路板702的表面及电子元器件的表面能,使沉积在主板模块40的表面和柔性电路板702的表面的水滴接触角趋于最大值,主板模块40的表面和柔性电路板702的表面呈现出较强的超疏水性能。
82.如图10所示,本实用新型还提供了一种镊子组件,包括可弯折镊子以及与主板模块40通讯连接的智能终端设备80,主板模块40上设置有用于将摄像组件70拍摄的图像形成图像信号并将该图像信号发送至智能终端设备80的图像成像处理模块90,智能终端设备80上设置有调节模块100;调节模块100用于根据智能终端设备80接收到的图像信号,向主板模块40发送调节第一夹持臂2、第二夹持臂3之间的闭合角度的调节指令,主板模块40根据调节指令控制驱动电机602的旋转方向与旋转速度以控制可弯折镊子的闭合角度。
83.通过设置与主板模块40通讯连接的智能终端设备80,并在主板模块40上设置图像成像处理模块90,使得图像成像处理模块90可将摄像组件70所拍摄的图像发送至智能终端设备80,并在智能终端设备80上设置调节模块100,调节模块100可根据接收到的图像信号向主板模块40发送调节第一夹持臂2、第二夹持臂3之间的张开和闭合角度的调节指令,从而通过智能终端设备80可实时、方便的对可弯折镊子的开合角度进行控制,使得该可弯折镊子即使在位于暗处及狭窄处仍然可进行精准的智能控制及操作,从而充分的满足操作者的需求。
84.具体地,智能终端设备80可为手机、平板机、计算机等智能终端设备。
85.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换或改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1