一种物联型辅助康复器械
1.本实用新型涉及一种机械装置,尤其涉及一种物联型辅助康复器械。
背景技术:
2.老人、康复期病人、分娩期产妇等群体身体较弱且行动不便,往往需要专人进行生活照顾、辅助康复或者定时提醒吃药等,对家庭成员的负担很大。因此开发了一种物联型辅助康复器械,能够在保证自身稳定的基础上辅助上述人群起坐、站立支撑、行走辅助和提醒吃药等,并集成物联网通讯和远程监控功能,极大节省了专人照顾的工作量。本实用新型定位于辅助器械而非医疗器械,即可用于专业医疗保健机构,也可用于家庭助老工具,市场前景广阔。
技术实现要素:
3.一种物联型辅助康复器械,包括:底盘模块、自稳模块、外壳体、并联丝杠、托臂、伸缩药盒、屏幕、传感器、升降杆、真空泵;
4.所述底盘模块为刚性空心结构,内部安装自稳模块和真空泵,下底面上设置工艺孔并安装平衡轮;所述外壳体为刚性空心结构,设置在底盘模块的上方并紧固连接,外壳体上设置工艺孔;所述并联丝杠由两根独立驱动的丝杠并联组成,设置在外壳体内部的左侧,托臂的左端伸出外壳体的左端面,右端安装在并联丝杠上;所述伸缩药盒设置在外壳体的一侧端面上;所述屏幕和传感器设置在外壳体的顶端左部,所述升降杆设置在外壳体的顶端右部;
5.所述自稳模块包括:凸轮、驱动轴、啮合销轴、升降台、真空吸盘;所述升降台为刚性平板结构,多个真空吸盘固定设置在升降台上,各个真空吸盘的输气管连接真空泵;所述凸轮上设置凸轮形内轨道,所述啮合销轴和内轨道配合连接,啮合销轴通过刚性杆连接升降台的中心;凸轮的中心连接驱动轴。
6.进一步的方案在于,所述伸缩药盒包括:药仓、齿轮齿条、舵机;所示药仓1并排设置多个,每个药仓连接齿轮齿条的齿条,齿轮齿条的齿轮连接舵机。
7.进一步的方案在于,所述传感器包括视频传感器、声音传感器、测温传感器、心率传感器。
8.进一步的方案在于,外壳体内设置物联网模块、无线通讯模块和充电电池。
附图说明
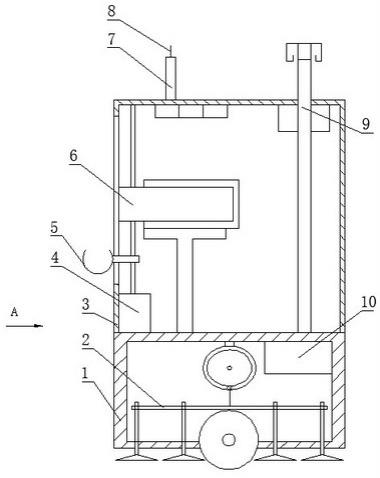
9.图1为本实用新型的整体结构剖视图;
10.图2为并联丝杠的a向结构视图;
11.图3为自稳模块的结构示意图;
12.图4为伸缩药盒的结构示意图。
具体实施方式
13.一种物联型辅助康复器械,如图1
‑
2所示,包括:底盘模块1、自稳模块2、外壳体3、并联丝杠4、托臂5、伸缩药盒6、屏幕7、传感器8、升降杆9、真空泵10;
14.所述底盘模块1为刚性空心结构,内部安装自稳模块2和真空泵10,下底面上设置工艺孔并安装平衡轮,平衡轮的安装、驱动和控制为公知技术,各工艺孔可根据需求设置形状和大小;所述外壳体3为刚性空心结构,设置在底盘模块1的上方并紧固连接,外壳体3上设置工艺孔,各工艺孔可根据需求设置形状和大小;所述并联丝杠4如图2所示,由两根独立驱动的丝杠并联组成,设置在外壳体3内部的左侧,托臂5的左端伸出外壳体3的左端面,右端安装在并联丝杠4上;所述伸缩药盒6设置在外壳体3的一侧端面上;所述屏幕7和传感器8设置在外壳体3的顶端左部,所述升降杆9设置在外壳体3的顶端右部;所述自稳模块2如图3所示,包括:凸轮2
‑
1、驱动轴2
‑
2、啮合销轴2
‑
3、升降台2
‑
4、真空吸盘2
‑
5;所述升降台2
‑
4为刚性平板结构,多个真空吸盘2
‑
5固定设置在升降台2
‑
4上,各个真空吸盘2
‑
5的输气管连接真空泵10;所述凸轮2
‑
1上设置凸轮形内轨道,所述啮合销轴2
‑
3和内轨道配合连接,啮合销轴2
‑
3通过刚性杆连接升降台2
‑
4的中心;凸轮2
‑
1的中心连接驱动轴2
‑
2,驱动轴2
‑
2连接旋转电机。当凸轮2
‑
1倍驱动轴2
‑
2带动旋转时,凸轮2
‑
1的内轨道使啮合销轴2
‑
3及刚性杆带动升降台2
‑
4进行升降运动,实现真空吸盘2
‑
5的升降控制,设置真空吸盘2
‑
5向下运动的极限是能够接触水平地面。啮合销轴2
‑
3和凸轮内轨道的连接方案为公知技术。
15.所述伸缩药盒6如图4所示,包括药仓6
‑
1、齿轮齿条6
‑
2、舵机6
‑
3;所示药仓6
‑
1并排设置多个,每个药仓6
‑
1连接齿轮齿条6
‑
2的齿条,齿轮齿条6
‑
2的齿轮连接舵机6
‑
3。每个药仓6
‑
1单独控制,控制方式可通过对舵机的定时驱动实现每个药仓6
‑
1的伸出和缩回,舵机的定时驱动控制为公知技术。
16.所述传感器8包括视频传感器、声音传感器、测温传感器、心率传感器。
17.外壳体3内设置物联网模块、无线通讯模块和充电电池。
18.实施例:
19.运动过程由平衡轮驱动底盘模块1,进而实现外壳体3及整体器械的运动,具体运动控制方案为公知技术。
20.康复器械在进行辅助时需要保持自身的稳定性,尤其在施加较大的助力时,紧靠平衡轮的自身稳定功能难以保持牢固的稳定性。自稳模块2的工作过程为驱动轴2
‑
2带动凸轮2
‑
1旋转,实现升降台2
‑
4的升降控制,进而实现各真空吸盘2
‑
5统一的升降控制,当真空吸盘2
‑
5的下吸附端接触到光滑的地面时,真空泵10开始工作对吸附端抽真空,使升降台2
‑
4和地面之间形成牢固的稳定关系,进而通过啮合销轴2
‑
3及刚性杆传递给凸轮2
‑
1,再通过驱动轴2
‑
2传递给底盘模块1,实现康复器械和地面之间的稳定性。驱动轴2
‑
2和底盘模块1之间通过旋转电机及轴承刚性连接,因此能够传递上述稳定关系,此为公知技术。
21.起坐、站立辅助过程:当康复器械整体稳定后,并联丝杠4带动托臂5上下运动,用户将手或臂放在托臂5上,即可获得上、下运动助力。采用并联丝杠结构,其有益效果在于能够保证托臂5的运动稳定性和助力力度较大。
22.伸缩药盒6工作过程,提前将每次服用药物放入相应的药仓6
‑
1内,通过定时模式控制舵机6
‑
3旋转,到达设定的时间后,舵机6
‑
3顺时针旋转带动齿轮齿条6
‑
2的齿轮驱动齿条,推动药仓6
‑
1伸出,当用户取走药物后,舵机6
‑
3反转将药仓6
‑
1拉回。
23.传感器8能够采集环境数据和被辅助者的体征数据,通过物联网模块、无线通讯模块和远程监护人进行通讯,屏幕7也能实时显示各项数据,提醒被辅助者关注。
24.升降杆9升起时,可悬挂需要高举的物体,如输液瓶,实现被辅助者输液时可散步行走,方便移动位置。
25.优点:本实用新型的助力模式结构巧妙、稳定性高,伸缩药盒的功能新颖,真正起到辅助康复助手的作用。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1