一种七自由度穿刺机器人的制作方法
1.本实用新型涉及医疗器材技术领域,特别涉及一种七自由度穿刺机器人。
背景技术:
2.1、现有的穿刺手术中,一般需要医生凭借个人经验,并借助医学影像结果不断调整角度,进行手动穿刺,这样手术过程十分消耗时间和精力,手术效果波动较大。为了减少人为因素引起的问题,越来越多的穿刺手术开始使用机械臂代替人工穿刺;
3.2、现阶段,在市场上或研究用的穿刺机器人使用的机械手臂大多为多自由度旋转关节式机械臂或直角坐标型机械手臂;
4.3、直角坐标型机械手臂,机械臂空间占用大,自由度限制较多;
5.4、多自由度旋转关节式机械臂有空间占用小,结构较紧凑能满足手术穿刺需求。但现有穿刺机器人存在以下问题:1)、关节结构、针角度调整装置复杂,需要克服齿轮间隙,皮带间隙,连杆铰接精度等加工装配难题。2)、机器人无锁紧或者锁紧不可靠、无断电保护,有位置偏移风险和手术过程中的其它风险;
6.5、现阶段的穿刺机器人结构冗杂、定位精度不高、可用工作范围不大;
7.6、现阶段穿刺机器人未解决多针穿刺和多次穿刺的需求的问题。
技术实现要素:
8.针对现有技术存在以上缺陷,本实用新型提供一种七自由度穿刺机器人如下:
9.本实用新型的技术方案是这样实现的:
10.一种七自由度穿刺机器人,包括移动承载台、xyz三轴直线运动机构、水平面定位机构、穿刺针角度调整机构以及穿刺针导向机构,所述xyz三轴直线运动机构控制连接水平面定位机构,所述水平面定位机构控制连接穿刺针角度调整机构,所述穿刺针角度调整机构控制连接穿刺针导向机构,所述xyz三轴直线运动机构的底部安装在移动承载台上。
11.优选地,所述xyz三轴直线运动机构包括x轴直线运动机构、y轴直线运动机构、z轴直线运动机构以及第一连杆与第二连杆,所述x轴直线运动机构固定于移动承载台上,所述z轴直线运动机构通过第一连杆与x轴直线运动机构连接,所述z轴直线运动机构通过第二连杆与y轴直线运动机构连接,所述y轴直线运动机构控制连接水平面定位机构。
12.优选地,所述xyz三轴直线运动机构包括x轴直线运动机构、y轴直线运动机构、z轴直线运动机构以及第一连杆与第二连杆,所述y轴直线运动机构固定于移动承载台上,所述z轴直线运动机构通过第一连杆与y轴直线运动机构连接,所述z轴直线运动机构通过第二连杆与x轴直线运动机构连接,所述x轴直线运动机构控制连接水平面定位机构。
13.优选地,所述移动承载台包括:
14.底盘,所述的底盘作为机器人基座,用于各元件固定;
15.升降组件,所述升降组件设置于底盘下部或者侧面,用于机器人升起和降下;
16.滚轮,所述滚轮设置于底盘下部。
17.优选地,所述水平面定位机构包括第一旋转运动机构、第二旋转运动机构和第三连杆,所述第一旋转运动机构和第二旋转运动机构通过第三连杆连接,第一旋转运动机构和第二旋转运动机构的轴线平行设置,所述的第一旋转运动机构通过第四连杆与所述的xyz三轴直线运动机构末端连接。
18.优选地,所述穿刺针角度调整机构包括第三旋转运动机构、第五连杆和第四旋转运动机构,所述第三旋转运动机构和第四旋转运动机构通过第五连杆连接,第三旋转运动机构和第四旋转运动机构轴线垂直设置,所述第三旋转运动机构通过第六连杆与水平定位机构的第二旋转运动机构连接。
19.优选地,所述穿刺针导向机构包括夹紧机构以及激光发射模组,所述激光发射模组通过两个螺钉固定在夹紧机构上,激光发射模组的轴线与所述夹紧机构的夹持物所在轴线空间上平行,两个轴线之间有固定间距。所述夹紧机构与第四旋转运动机构连接,所述夹紧机构末端安装会张开与闭合的夹爪,所述夹爪通过末端法兰安装在夹紧机构末端。
20.优选地,所述第一旋转运动机构、第二旋转运动机构、第三旋转运动机构以及第四旋转运动机构设置有断电制动器。
21.与现有技术相比,本实用新型有以下有益效果:
22.本实用新型的七自由度穿刺机器人,本实用新型通过多维定位机构(七自由度)对夹针组件夹持的穿刺针进行定位,具有结构紧凑、定位精度高、工作范围大、安全性高的优点;夹紧机构可以夹紧松开,满足多针穿刺和多次穿刺的需求;多自由度,可以满足不同工作空间以及不同功能的要求。各旋转运动机构都带有断电制动装置,确保异常断电后机械臂不发生任何位移,保证安全性。激光发射模组可以在不使用夹紧机构的情况下直接指示穿刺入针点和穿刺通道。采用本机器人可以弥补手工穿刺和现有穿刺机器人的不足,帮助医生更好的手术,提高手术安全性和成功率。
附图说明
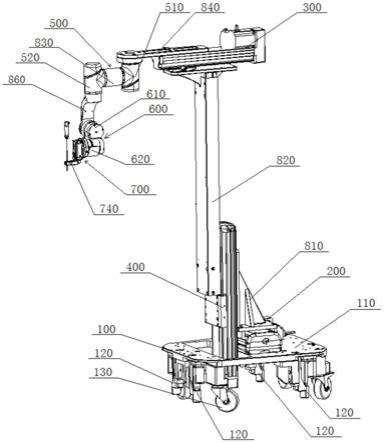
23.图1为本实用新型七自由度穿刺机器人的结构示意图(不含外壳);
24.图2为本实用新型七自由度穿刺机器人(水平面定位机构、穿刺针角度调整机构以及穿刺针导向机构)的部分结构示意图;
25.图3为本实用新型七自由度穿刺机器人的外观图(包含壳体)。
26.图中:移动承载台100,底盘110,升降组件120,滚轮130,x轴直线运动机构200,y轴直线运动机构300,z轴直线运动机构400,水平面定位机构500,第一旋转运动机构510,第二旋转运动机构520,穿刺针角度调整机构600,第三旋转运动机构610,第五连杆850,第四旋转运动机构620,穿刺针导向机构 700,夹紧机构710,激光发射模组720,电路板730,夹爪740,末端法兰750 第一连杆810,第二连杆820,第三连杆830,第四连杆840,第五连杆850,第六连杆860。
具体实施方式
27.下面将结合本实用新型实施例中的附图,对本实用新型进行清楚、完整地描述。
28.如图1至3所示,一种七自由度穿刺机器人,包括移动承载台100、xyz三轴直线运动机构、水平面定位机构500、穿刺针角度调整机构600以及穿刺针导向机构700,所述xyz三轴
直线运动机构控制连接水平面定位机构500,所述水平面定位机构500控制连接穿刺针角度调整机构600,所述穿刺针角度调整机构 600控制连接穿刺针导向机构700,所述xyz三轴直线运动机构的底部安装在移动承载台100上,所述移动承载台100可以在地面上移动为第一自由度,xyz三轴直线运动机构为第二、三、四自由度,所述水平面定位机构500为第五自由度,所述穿刺针角度调整机构600为第六自由度,所述穿刺针导向机构700为第七自由度,本实用新型通过多维定位机构(七自由度)对穿刺针进行穿刺、定位。
29.关于xyz三轴直线运动机构的实施例一,所述xyz三轴直线运动机构包括x 轴直线运动机构200、y轴直线运动机构300、z轴直线运动机构400以及第一连杆810与第二连杆820,所述x轴直线运动机构200固定于移动承载台100上,所述z轴直线运动机构400通过第一连杆810与x轴直线运动机构200连接,所述z轴直线运动机构400通过第二连杆820与y轴直线运动机构300连接,所述y轴直线运动机构300控制连接水平面定位机构500。
30.关于xyz三轴直线运动机构的实施例二,所述xyz三轴直线运动机构包括x 轴直线运动机构200、y轴直线运动机构300、z轴直线运动机构400以及第一连杆810与第二连杆820,所述y轴直线运动机构300固定于移动承载台100上,所述z轴直线运动机构400通过第一连杆810与y轴直线运动机构300连接,所述z轴直线运动机构400通过第二连杆820与x轴直线运动机构200连接,所述x轴直线运动机构200控制连接水平面定位机构500。
31.上述关于xyz三轴直线运动机构的实施例一以及实施例二,也可以是,所述x轴直线运动机构200或者y轴直线运动机构300均可固定于移动承载台100 上,连接和控制z轴直线运动机构400,然后所述z轴直线运动机构对应连接和控制y轴直线运动机构300或x轴直线运动机构200。特别地,所述xyz三轴直线运动机构,包括但不限于由3个或3个以上不平行的直线运动机构按任意顺序组成。
32.所述移动承载台100包括:
33.底盘110,所述的底盘110作为机器人基座,用于各元件固定,所述所述x 轴直线运动机构200或者y轴直线运动机构300直接固定于底盘110上;
34.升降组件120,所述升降组件120设置于底盘110下部或者侧面,用于机器人升起和降下,升起时,可保证穿刺机器人在手术过程中稳定性。降下时,穿刺机器人通过滚轮130移动位置;
35.滚轮130,所述滚轮130设置于底盘110下部。
36.所述水平面定位机构500包括第一旋转运动机构510、第二旋转运动机构 520和第三连杆830,所述510和第二旋转运动机构520通过第三连杆830连接,第一旋转运动机构510和第二旋转运动机构520的轴线平行设置,所述的第一旋转运动机构510通过第四连杆840与所述的xyz三轴直线运动机构末端连接,所述水平面定位机构500可控制穿刺针导向机构700朝向,可满足某些特殊场景要求。例如光学导航等。
37.所述穿刺针角度调整机构600包括第三旋转运动机构610、第五连杆850和第四旋转运动机构620,所述第三旋转运动机构610和第四旋转运动机构620通过第五连杆850连接,第三旋转运动机构610和第四旋转运动机构620轴线垂直设置,所述第三旋转运动机构610通过第六连杆860与水平面定位机构500 的第二旋转运动机构520连接。
38.所述穿刺针导向机构700包括夹紧机构710以及激光发射模组720,所述激光发射模组720的轴线与所述夹紧机构710的夹持物所在轴线空间上平行,所述穿刺针导向机构
700上还设置有控制激光发射模组720的电路板730,所述夹紧机构710与第四旋转运动机构620连接,所述夹紧机构710末端安装会张开与闭合的夹爪740,所述夹爪740通过末端法兰750安装在夹紧机构710末端。
39.所述第一旋转运动机构510、第二旋转运动机构520、第三旋转运动机构610 以及第四旋转运动机构620设置有断电制动器,确保异常断电后机械臂不发生任何位移,保证安全性。
40.综合本实用新型的结构可知,本实用新型的七自由度穿刺机器人,本实用新型通过多维定位机构(七自由度)对夹针组件夹持的穿刺针进行定位,具有结构紧凑、定位精度高、工作范围大、安全性高的优点;夹紧机构可以夹紧松开,满足多针穿刺和多次穿刺的需求;多自由度,可以满足不同工作空间以及不同功能的要求。各旋转运动机构都带有断电制动装置,确保异常断电后机械臂不发生任何位移,保证安全性。采用本机器人可以弥补手工穿刺和现有穿刺机器人的不足,帮助医生更好的手术,提高手术安全性和成功率。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1