用于医用胃肠镜器械存储转运推车的制作方法
1.本实用新型涉及一种工具,尤其是一种用于医用胃肠镜器械存储转运推车。
背景技术:
2.肠胃一般指消化系统的胃和小肠、大肠部分,而胃和小肠是营养吸收的核心。人体需要的营养几乎都需要经过肠胃,肠胃成为消化最重要的器官。
3.在医院内镜中心每天胃肠镜检查、手术病人量庞大,目前,对于胃肠镜输送通常是使用医用推车进行,常见的医用推车包括车体及设置在车体上的胃肠镜存放可拿取托盘,为了便于胃肠镜的存放,存放托盘为多层,然而现有的医用推车虽然满足了转运的需求,但是位于下方侧的存放盒里的胃肠镜都需要医护人员弯腰进行拿取,并且胃肠镜常常会缠绕一起,在拿到手术室内进行使用时,传统上都需要把存放盒拿到平的平面处,胃肠镜器械梳理完成后,再放回到医用推车处,然后推入到手术室内给医生使用,这种方式由于不在绝对的无菌环境下操作,所以易会造成胃肠镜器械的二次污染,并且医护人员经常性的弯腰去抬动、放回位于下方侧的存放盒,时间长了会造成医护人员腰部的腰肌劳损,不利于医护人员的长效工作及健康。
技术实现要素:
4.本实用新型要解决上述现有技术的缺点,提供一种能够对下方侧存放盒进行移位并抬升无需医护人员弯腰拿取、放回并且更加无菌卫生的用于医用胃肠镜器械存储转运推车,满足了医护人员轻松整理下方侧存放盒内的胃肠镜器械、不会发生腰肌劳损并且更加卫生无菌的需求。
5.本实用新型解决其技术问题采用的技术方案:这种用于医用胃肠镜器械存储转运推车,包括推车架体,推车架体上开有腔体,推车架体的底端四角均固定有支撑杆,各支撑杆的底端均固定有带刹万向轮,腔体内设有上支撑托盘,上支撑托盘通过抽屉伸缩导轨抽拉配合在推车架体处,上支撑托盘内搁放有上存放盒,上支撑托盘的下方设有下支撑托盘,下支撑托盘上搁放有下存放盒,推车架体上设有用于下支撑托盘导向移动并抬高的移动抬升机构;移动抬升机构包括位于下支撑托盘下方的容纳框,容纳框的底面内、外端均固定有第一导轨,第一导轨的侧端设有固定在容纳框处的齿条,推车架体上固定有一对分别与两第一导轨配合的第一滑块,齿条的下方设有转动连接在推车架体处的第一传动轴,第一传动轴的侧端设有转动连接在推车架体处的第二传动轴,第二传动轴与第一传动轴之间安装有第二万向关节接头,第一传动轴的端部固定有与齿条配合的齿轮,推车架体上转动连接有带动第二传动轴转动的第一手摇轮,两容纳框的腔体底面固定有一对内、外相对设置的第二导轨,两第二导轨上均滑动连接有第二滑块,下支撑托盘位于第二导轨的上方,下支撑托盘的底面固定有一对内、外相对设置的第三导轨,两第三导轨处均滑动连接有第三滑块,两第二导轨与两第三导轨的上、下之间均设置有x型升降杆,x型升降杆的底端两侧分别铰接在两第二滑块处,x型升降杆的顶端两侧分别铰接在两第三滑块处,宽度方向两第二滑块
之间均固定有连接板,两连接板上均固定有固定块,两固定块处分别螺纹连接有螺纹方向相反并固定一起的螺纹杆,螺纹杆处开有截面为方形的长通道孔,长通道孔处插接有方形杆,方形杆的侧端固定有圆杆,圆杆的侧端设有转动连接在推车架体上的第三传动轴,第三传动轴的侧端设有转动连接在推车架体上的第四传动轴,第四传动轴的侧端设有转动连接在推车架体上的第五传动轴,圆杆与第三传动轴之间安装有第三万向关节接头,第三传动轴与第四传动轴之间安装有第四万向关节接头,第四传动轴与第五传动轴之间安装有第五万向关节接头,推车架体上转动连接有带动第五传动轴转动的第二手摇轮;推车架体上固定有推动把手。这里推车架体、支撑杆、带刹万向轮的作用是,用于对上存放盒及下存放盒的放置及转运;这里上支撑托盘、上存放盒的作用是,用于存放胃镜器械,由于上存放盒的位置高,所以医护人员无需弯腰就能够对缠绕一起的胃镜器械进行理顺整理,整理完成后直接把上存放盒从上支撑托盘处拿出到指定位置给位于手术室内的医护人员使用,从而更加无菌卫生;这里下支撑托盘、下存放盒的作用是,用于存放胃镜器械;这里移动抬升机构的作用是,用于对下存放盒从腔体处移出并向上抬升到与上存放盒等高的位置;这里移动抬升机构的工作原理:首先先摇动第一手摇轮,第一手摇轮带动第二传动轴旋转,第二传动轴转动会通过第二万向关节接头来带动第一传动轴旋转,从而带动齿轮旋转,进而带动齿条移动,从而带动容纳框外移,进而带动下存放盒外移到指定位置停止,接着摇动第二手摇轮,第二手摇轮摇动并带动第五传动轴旋转,第五传动轴转动从而利用第五万向关节接头来带动第四传动轴旋转,第四传动轴转动从而利用第四万向关节接头来带动第三传动轴旋转,第三传动轴转动从而利用第三万向关节接头来带动圆杆转动,由于方形杆插接在截面为方形的长通道孔处,所以圆杆会带动方形杆转动,方形杆会同步带动两螺纹杆旋转,由于两螺纹杆螺纹方向相反,两螺纹杆旋转时会带动两固定块相互靠拢,从而能够带动x型升降杆抬升下支撑托盘及下存放盒抬升高度到与上存放盒等同高度,从而便于医护人员对为胃镜器械的理顺整理及不用弯腰拿取下存放盒。
6.进一步完善,推车架体上转动连接有第六传动轴,第六传动轴与第二传动轴之间安装有第六万向关节接头,第六传动轴处固定有第一蜗轮,第一手摇轮的轴杆上固定有与第一蜗轮配合的第一蜗杆;推车架体上转动连接有第七传动轴,第七传动轴与第五传动轴之间安装有第七万向关节接头,第七传动轴处固定有第二蜗轮,第二手摇轮的轴杆上固定有与第二蜗轮配合的第二蜗杆。这里第六传动轴、第六万向关节接头、第一蜗轮、第一蜗杆的作用是,利用蜗轮蜗杆的单向性作用,从而只有用手去摇动第一手摇轮才能够带动下存放盒的外移,避免外力造成下存放盒不自主的移动;这里第七传动轴、第七万向关节接头、第二蜗轮、第二蜗杆的作用是,利用蜗轮蜗杆的单向性作用,从而只有用手去摇动第一手摇轮才能够带动x型升降杆被抬升,避免重物造成x型升降杆被压动下移复位的情况发生。
7.进一步完善,推车架体的顶端固定有围栏。这里围栏的作用是,能够把有些物品放置在推车架体的顶端,围栏起到防止物品从推车架体顶面掉落的作用。
8.进一步完善,推车架体的顶面固定有用于盖住上存放盒及下存放盒的挡布。这里挡布的作用是,在转运的过程中能够对上存放盒及下存放盒进行遮挡防灰尘的作用,更加的干净、卫生。
9.进一步完善,两内、外相对设置的支撑杆呈“八”字型设置。这里两内、外相对设置的支撑杆呈“八”字型设置的作用是,推车运行起来更加的稳定,稳定性更好,并且能够防止
推车侧翻。
10.进一步完善,推动把手的外端均套接固定有橡胶套,橡胶套上固定有一组橡胶凸点。这里橡胶套、橡胶凸点的作用是,能够提高人的手部对推动把手的把持力,推动推车时更加的平稳。
11.本实用新型有益的效果是:本实用新型结构设计巧妙、合理,利用推车架体、支撑杆、带刹万向轮能够用于对上存放盒及下存放盒的放置及转运,利用上支撑托盘、上存放盒能够用于存放胃镜器械,由于上存放盒的位置高,所以医护人员无需弯腰就能够对缠绕一起的胃镜器械进行理顺整理,整理完成后直接把上存放盒从上支撑托盘处拿出到指定位置给位于手术室内的医护人员使用,从而更加无菌卫生,利用下支撑托盘、下存放盒能够用于存放胃镜器械,利用移动抬升机构能够用于对下存放盒从腔体处移出并向上抬升到与上存放盒等高的位置,便于对下方侧位于下存放盒内的胃镜器械进行理顺及拿取,不会造成医护人员的腰肌劳损,本实用新型能够对胃肠镜器械器进行整理理顺、不用弯腰、并且无菌也方便拿取,值得推广应用。
附图说明
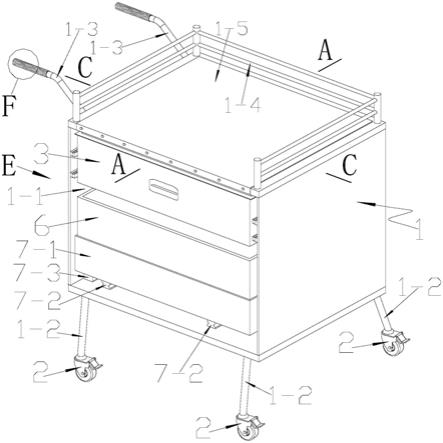
12.图1为本实用新型的立体图;
13.图2为图1的a
‑
a剖面示意图;
14.图3为图2的b区域局部放大图;
15.图4为图1的c
‑
c剖面示意图;
16.图5为图4的d区域局部放大图;
17.图6为图1的e视角视图;
18.图7为本实用新型中第二手摇轮带动方形杆转动的立体示意图;
19.图8为图1的f区域局部放大图;
20.图9为本实用新型中带动下存放盒从腔体处外移并被抬升的工作原理流程图。
21.附图标记说明:推车架体1,腔体1
‑
1,支撑杆1
‑
2,推动把手1
‑
3,围栏1
‑
4,挡布1
‑
5,橡胶套1
‑
6,橡胶凸点1
‑
6a,带刹万向轮2,上支撑托盘3,上存放盒4,下支撑托盘5,下存放盒6,移动抬升机构7,容纳框7
‑
1,第一导轨7
‑
2,齿条7
‑
3,第一传动轴7
‑
4,第二传动轴7
‑
5,第一手摇轮7
‑
6,第一滑块7
‑
7,第二万向关节接头7
‑
8,第二滑块7
‑
9,第三滑块7
‑
10,x型升降杆7
‑
11,第三滑块7
‑
12,连接板7
‑
13,固定块7
‑
14,螺纹杆7
‑
15,方形杆7
‑
16,圆杆7
‑
16a,第三传动轴7
‑
17,第四传动轴7
‑
18,第五传动轴7
‑
19,第四万向关节接头7
‑
20,第五万向关节接头7
‑
21,第二手摇轮7
‑
22,第一蜗轮7
‑
23,第一蜗杆7
‑
24,第七传动轴7
‑
25,第七万向关节接头7
‑
26,第二蜗轮7
‑
27,第二蜗杆7
‑
28,齿轮7
‑
29,第二导轨7
‑
30,第三导轨7
‑
31,第三万向关节接头7
‑
32,第六传动轴7
‑
33,第六万向关节接头7
‑
34。
具体实施方式
22.下面结合附图对本实用新型作进一步说明:
23.参照附图:这种用于医用胃肠镜器械存储转运推车,包括推车架体1,推车架体1上开有腔体1
‑
1,推车架体1的底端四角均固定有支撑杆1
‑
2,各支撑杆1
‑
2的底端均固定有带刹万向轮2,腔体1
‑
1内设有上支撑托盘3,上支撑托盘3通过抽屉伸缩导轨抽拉配合在推车
架体1处,上支撑托盘3内搁放有上存放盒4,上支撑托盘3的下方设有下支撑托盘5,下支撑托盘5上搁放有下存放盒6,推车架体1上设有用于下支撑托盘5导向移动并抬高的移动抬升机构7;移动抬升机构7包括位于下支撑托盘5下方的容纳框7
‑
1,容纳框7
‑
1的底面内、外端均固定有第一导轨7
‑
2,第一导轨7
‑
2的侧端设有固定在容纳框7
‑
1处的齿条7
‑
3,推车架体1上固定有一对分别与两第一导轨7
‑
2配合的第一滑块7
‑
7,齿条7
‑
3的下方设有转动连接在推车架体1处的第一传动轴7
‑
4,第一传动轴7
‑
4的侧端设有转动连接在推车架体1处的第二传动轴7
‑
5,第二传动轴7
‑
5与第一传动轴7
‑
4之间安装有第二万向关节接头7
‑
8,第一传动轴7
‑
4的端部固定有与齿条7
‑
3配合的齿轮7
‑
29,推车架体1上转动连接有带动第二传动轴7
‑
5转动的第一手摇轮7
‑
6,两容纳框7
‑
1的腔体底面固定有一对内、外相对设置的第二导轨7
‑
30,两第二导轨7
‑
30上均滑动连接有第二滑块7
‑
9,下支撑托盘5位于第二导轨7
‑
30的上方,下支撑托盘5的底面固定有一对内、外相对设置的第三导轨7
‑
31,两第三导轨7
‑
31处均滑动连接有第三滑块7
‑
10,两第二导轨7
‑
30与两第三导轨7
‑
31的上、下之间均设置有x型升降杆7
‑
11,x型升降杆7
‑
11的底端两侧分别铰接在两第二滑块7
‑
9处,x型升降杆7
‑
11的顶端两侧分别铰接在两第三滑块7
‑
10处,宽度方向两第二滑块7
‑
9之间均固定有连接板7
‑
13,两连接板7
‑
13上均固定有固定块7
‑
14,两固定块7
‑
14处分别螺纹连接有螺纹方向相反并固定一起的螺纹杆7
‑
15,螺纹杆7
‑
15处开有截面为方形的长通道孔7
‑
15a,长通道孔7
‑
15a处插接有方形杆7
‑
16,方形杆7
‑
16的侧端固定有圆杆7
‑
16a,圆杆7
‑
16a的侧端设有转动连接在推车架体1上的第三传动轴7
‑
17,第三传动轴7
‑
17的侧端设有转动连接在推车架体1上的第四传动轴7
‑
18,第四传动轴7
‑
18的侧端设有转动连接在推车架体1上的第五传动轴7
‑
19,圆杆7
‑
16a与第三传动轴7
‑
17之间安装有第三万向关节接头7
‑
32,第三传动轴7
‑
17与第四传动轴7
‑
18之间安装有第四万向关节接头7
‑
20,第四传动轴7
‑
18与第五传动轴7
‑
19之间安装有第五万向关节接头7
‑
21,推车架体1上转动连接有带动第五传动轴7
‑
19转动的第二手摇轮7
‑
22;推车架体1上固定有推动把手1
‑
3。
24.推车架体1上转动连接有第六传动轴7
‑
33,第六传动轴7
‑
33与第二传动轴7
‑
5之间安装有第六万向关节接头7
‑
34,第六传动轴7
‑
33处固定有第一蜗轮7
‑
23,第一手摇轮7
‑
6的轴杆上固定有与第一蜗轮7
‑
23配合的第一蜗杆7
‑
24;推车架体1上转动连接有第七传动轴7
‑
25,第七传动轴7
‑
25与第五传动轴7
‑
19之间安装有第七万向关节接头7
‑
26,第七传动轴7
‑
25处固定有第二蜗轮7
‑
27,第二手摇轮7
‑
22的轴杆上固定有与第二蜗轮7
‑
27配合的第二蜗杆7
‑
28。
25.推车架体1的顶端固定有围栏1
‑
4。
26.推车架体1的顶面固定有用于盖住上存放盒4及下存放盒6的挡布1
‑
5。
27.两内、外相对设置的支撑杆1
‑
2呈“八”字型设置。
28.推动把手1
‑
3的外端均套接固定有橡胶套1
‑
6,橡胶套1
‑
6上固定有一组橡胶凸点1
‑
6a。
29.本实用新型的工作原理:首先把转运推车推入到手术室内的无菌环境下,然后掀开挡布1
‑
5,然后打开上支撑托盘3,对里面的胃肠镜器械缠绕一起的进行理顺,理顺好后,再把上存放盒4整体从上支撑托盘3处拿出到手术室内的指定位置,当需要对下存放盒6内的胃肠镜器械进行理顺整理时、先摇动第一手摇轮7
‑
6,第一手摇轮7
‑
6旋转会通过第一蜗杆7
‑
24来带动第一蜗轮7
‑
23转动,第一蜗轮7
‑
23旋转会带动第六传动轴7
‑
33转动,第六传
动轴7
‑
33转动会通过第六万向关节接头7
‑
34来带动第二传动轴7
‑
5旋转,第二传动轴7
‑
5转动会通过第二万向关节接头7
‑
8来带动第一传动轴7
‑
4旋转,从而带动齿轮7
‑
29旋转,进而带动齿条7
‑
3移动,从而带动容纳框7
‑
1外移(在容纳框7
‑
1外移的时候,长通道孔7
‑
15a也在方形杆7
‑
16处移动),进而带动下支撑托盘5及下存放盒6外移到指定位置停止,接着摇动第二手摇轮7
‑
22,第二手摇轮7
‑
22旋转会带动第二蜗杆7
‑
28转动,第二蜗杆7
‑
28转动会带动第二蜗轮7
‑
27旋转,第二蜗轮7
‑
22旋转会带动第七传动轴7
‑
25转动,第七传动轴7
‑
25通过第七万向关节接头7
‑
26来带动第五传动轴7
‑
19旋转,第五传动轴7
‑
19转动从而利用第五万向关节接头7
‑
21来带动第四传动轴7
‑
18旋转,第四传动轴7
‑
18转动从而利用第四万向关节接头7
‑
20来带动第三传动轴7
‑
17旋转,第三传动轴7
‑
17转动从而利用第三万向关节接头7
‑
32来带动圆杆7
‑
16a转动,由于方形杆7
‑
16插接在截面为方形的长通道孔7
‑
15a处,所以圆杆7
‑
16a会带动方形杆7
‑
16转动,方形杆7
‑
16会同步带动两螺纹杆7
‑
15旋转,由于两螺纹杆7
‑
15螺纹方向相反,两螺纹杆7
‑
15旋转时会带动两固定块7
‑
14相互靠拢,从而能够带动x型升降杆7
‑
11抬升下支撑托盘5及下存放盒6抬升高度到与上存放盒4等同高度(如图9所示),从而医护人员不用弯腰的对为胃镜器械进行理顺整理,整理好后,下存放盒6从下支撑托盘5被抬走拿到指定位置,由于胃肠镜器械的整理及抬走均是在无菌环境下的手术室内进行的,所以本实用新型的这种推车不仅无需医护人员弯腰抬取胃肠镜器械,而且整个过程更加的无菌干净,避免胃肠镜器械的二次污染发生,值得推广应用。
30.虽然本实用新型已通过参考优选的实施例进行了图示和描述,但是,本专业普通技术人员应当了解,在权利要求书的范围内,可作形式和细节上的各种各样变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1