一种视网膜脱离患者术后护理用助行器
1.本实用新型属于医疗辅助器械技术领域,具体涉及一种视网膜脱离患者术后护理用助行器。
背景技术:
2.近年来,在眼科收治了很多视网膜脱离的患者,玻璃体切割联合眼内惰性气体或者硅油填充已成为视网膜脱离疾病的有效治疗方法。
3.视网膜脱离手术后,一般要求患者根据裂孔位置保持特殊体位,通常为面向下体位,具体为俯卧位、低头坐位、站立头低位以及行走头低位等,使裂孔处于高位,保持气泡或硅油泡充分上浮,利用气泡或油泡的表面张力封闭裂孔,依靠裂孔周围的视网膜色素上皮和神经上皮粘连,促进裂孔封闭,从而使脱离的视网膜达到解剖复位。此类患者术后严格保持特殊体位的时间一般不少于2周,严格遵从体位要求是促进视视网膜复位的关键之一。
4.当前,视网膜脱离患者术后在进行头低位行走时,由于无法看到行走前方的路况及障碍物,容易发生跌倒和碰撞的风险,因此,必须由家属或者护士陪同搀扶,行动十分不便。
技术实现要素:
5.本实用新型的目的在于针对现有技术的不足之处,提供一种结构简单,使用方便,便于视网膜脱离患者术后自主行动,提高患者术后生活质量和舒适度,减轻家属及医护人员负担,且安全实用的视网膜脱离患者术后护理用助行器。
6.为解决上述技术问题,本实用新型采用如下技术方案:
7.一种视网膜脱离患者术后护理用助行器,包括主体框架,所述主体框架底部包括前轮和后轮,所述后轮连接有刹车装置,所述主体框架包括设置于前方的雷达测距仪以及水平设置的电子控制台,所述电子控制台包括与雷达测距仪电性连接的报警喇叭及电源模块。
8.进一步地,所述雷达测距仪包括两个且分别设置于主体框架前方左右边缘处,所述报警喇叭包括两个且设置于电子控制台左右边缘处,所述报警喇叭分别与对应侧的雷达测距仪电性连接。电子控制台内安装有用于处理雷达测距仪信号的控制器,两个雷达测距仪可分别用于测定前方左右两侧的障碍物,并将障碍信号反馈至控制器以启动对应侧的报警喇叭,同时随着主体框架与障碍物距离的缩小,控制器控制报警喇叭的报警声发生变化,当靠近前方障碍物时,报警声逐渐急促,当靠近侧方障碍物时,报警声逐渐变大,患者可通过报警声的变化以及报警声的方位判断前方障碍所在位置,从而判断前行方向,避免受伤,使患者术后可自行进行一定范围的活动,减轻家属及医护人员的负担,提高患者术后生活质量和舒适度,安全实用。优选雷达测距仪的探测距离大于1.5m。
9.进一步地,所述主体框架包括两个相对布置的a型侧支架,两个所述a型侧支架靠近前方一边通过若干横梁连接形成整体,所述电子控制台设置于其中一根横梁上方,所述a
型侧支架顶部为用作扶手的横部。a型侧支架及横梁组成的主体框架稳定性好,横梁设置于靠近前方一边,使整个主体框架形成方便患者站立及扶握的结构,使用方便,可辅助患者进行自主行进活动,同时可对患者起到一定的保护作用,提高患者生活质量和舒适度,结构简单,安全实用。
10.进一步地,所述主体框架下半部分设置有高度调节装置。通过高度调节装置,可适用于不同身高的患者使用,适用范围广,实用性强。
11.进一步地,所述高度调节装置为伸缩套杆。优选伸缩套杆包括内杆和外杆,外杆包括若干间隔布置的卡位孔,内杆包括通过弹簧片连接的卡位按钮,通过弹簧使卡位按钮自卡位孔弹出实现高度固定,结构简单,方便操作,适用范围广。
12.进一步地,所述前轮为两个单向轮,所述后轮为两个万向轮,所述刹车装置设置于两个万向轮外侧。前轮和后轮共同实现主体框架的移动和转向功能,以后轮作为转向轮,可以减小转弯半径,提高装置整体的机动性,结构简单,方便实用。
13.进一步地,所述刹车装置包括手刹车件和脚刹车件,所述手刹车件为主体框架顶部的连接有刹车线的控制按钮,所述脚刹车件设置于后轮处。控制按钮通过刹车线与后轮连接,优选控制按钮设置于a型侧支架顶部的横部处的按压式刹车结构,方便患者操作,使患者通过手指按压即可轻松调节刹车力的大小,刹车装置用于提高装置的整体稳定性,患者可根据行动能力及使用感受调节刹车力的大小,从而控制移动速度,同时脚刹车件对安全性起到双重保证,安全实用。
14.与现有技术相比,本实用新型的有益效果为:
15.本实用新型结构简单,使用方便,便于视网膜脱离患者术后自主行动,提高患者术后生活质量和舒适度,减轻家属及医护人员负担,且安全实用。主体框架方便患者站立、扶握及在移动过程中进行支撑,前轮和后轮方便主体框架的移动流畅性,刹车装置避免患者行进过程中速度过快,保证患者安全;雷达测距仪用于探测周围障碍物,使患者在无法目视前方的情况下仍能避免撞到障碍物,使患者可进行自主活动;电子控制台包括用于处理雷达测距仪反馈信号的控制器,报警喇叭通过接收控制器处理的报警信号发出报警声,提醒患者注意避让障碍物,结构简单,使用方便,便于视网膜脱离患者术后自主行动,提高患者术后生活质量和舒适度,减轻家属及医护人员负担,安全实用;电子控制台水平设置,包括用于给雷达测距仪、控制器及报警喇叭供电的电源及开关,方便患者自行操作。
附图说明
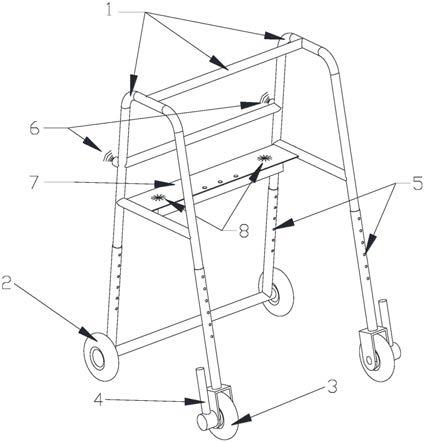
16.图1为本实用新型整体结构示意图。
17.其中,1
‑
主体框架,2
‑
前轮,3
‑
后轮,4
‑
刹车装置,5
‑
高度调节装置,6
‑
雷达测距仪,7
‑
电子控制台,8
‑
报警喇叭。
具体实施方式
18.下面将结合本实用新型实施例对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动的前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
19.需要说明的是,在不冲突的情况下,本实用新型中的实施例及实施例中的特征可以相互组合。
20.下面结合具体实施例对本实用新型作进一步说明,但不作为本实用新型的限定。
21.图中所示的视网膜脱离患者术后护理用助行器,包括主体框架1,主体框架1底部包括前轮2和后轮3,后轮3连接有刹车装置4,主体框架1包括设置于前方的雷达测距仪6以及水平设置的电子控制台7,电子控制台7包括与雷达测距仪6电性连接的报警喇叭8及电源模块。主体框架方便患者站立、扶握及在移动过程中进行支撑,前轮和后轮方便主体框架的移动流畅性,刹车装置避免患者行进过程中速度过快,保证患者安全;雷达测距仪用于探测周围障碍物,使患者在无法目视前方的情况下仍能避免撞到障碍物,使患者可进行自主活动;电子控制台包括用于处理雷达测距仪反馈信号的控制器,报警喇叭通过接收控制器处理的报警信号发出报警声,提醒患者注意避让障碍物,结构简单,使用方便,便于视网膜脱离患者术后自主行动,提高患者术后生活质量和舒适度,减轻家属及医护人员负担,安全实用;电子控制台水平设置,包括用于给雷达测距仪、控制器及报警喇叭供电的电源及开关,方便患者自行操作。本实用新型结构简单,使用方便,便于视网膜脱离患者术后自主行动,提高患者术后生活质量和舒适度,减轻家属及医护人员负担,且安全实用。
22.作为优选,雷达测距仪6包括两个且分别设置于主体框架1前方左右边缘处,报警喇叭8包括两个且设置于电子控制台7左右边缘处,报警喇叭8分别与对应侧的雷达测距仪6电性连接。电子控制台内安装有用于处理雷达测距仪信号的控制器,两个雷达测距仪可分别用于测定前方左右两侧的障碍物,并将障碍信号反馈至控制器以启动对应侧的报警喇叭,同时随着主体框架与障碍物距离的缩小,控制器控制报警喇叭的报警声发生变化,当靠近前方障碍物时,报警声逐渐急促,当靠近侧方障碍物时,报警声逐渐变大,患者可通过报警声的变化以及报警声的方位判断前方障碍所在位置,从而判断前行方向,避免受伤,使患者术后可自行进行一定范围的活动,减轻家属及医护人员的负担,提高患者术后生活质量和舒适度,安全实用。优选雷达测距仪的探测距离大于1.5m。
23.作为优选,主体框架1包括两个相对布置的a型侧支架,两个a型侧支架靠近前方一边通过若干横梁连接形成整体,电子控制台7设置于其中一根横梁上方,a型侧支架顶部为用作扶手的横部。a型侧支架及横梁组成的主体框架稳定性好,横梁设置于靠近前方一边,使整个主体框架形成方便患者站立及扶握的结构,使用方便,可辅助患者进行自主行进活动,同时可对患者起到一定的保护作用,提高患者生活质量和舒适度,结构简单,安全实用。
24.作为优选,主体框架1下半部分设置有高度调节装置5。通过高度调节装置,可适用于不同身高的患者使用,适用范围广,实用性强。
25.作为优选,高度调节装置5为伸缩套杆。优选伸缩套杆包括内杆和外杆,外杆包括若干间隔布置的卡位孔,内杆包括通过弹簧片连接的卡位按钮,通过弹簧使卡位按钮自卡位孔弹出实现高度固定,结构简单,方便操作,适用范围广。
26.作为优选,前轮2为两个单向轮,后轮3为两个万向轮,刹车装置4设置于两个万向轮外侧。前轮和后轮共同实现主体框架的移动和转向功能,以后轮作为转向轮,可以减小转弯半径,提高装置整体的机动性,结构简单,方便实用。
27.作为优选,刹车装置4包括手刹车件和脚刹车件,手刹车件为主体框架1顶部的连接有刹车线的控制按钮,脚刹车件设置于后轮3处。控制按钮通过刹车线与后轮连接,优选
控制按钮设置于a型侧支架顶部的横部处的按压式刹车结构,方便患者操作,使患者通过手指按压即可轻松调节刹车力的大小,刹车装置用于提高装置的整体稳定性,患者可根据行动能力及使用感受调节刹车力的大小,从而控制移动速度,同时脚刹车件对安全性起到双重保证,安全实用。
28.使用前,由护士或家属根据患者身高,通过操作高度调节装置对主体框架的高度进行调节;根据患者身体情况,通过操作刹车装置对助行器的制动力进行调节,以防止患者因速度过快而失控摔倒。当患者需要活动身体或者上厕所时,患者双手紧握主体框架顶部,此时患者面部朝下,通过操作电子控制台,打开电源开关,此时雷达测距仪和报警喇叭处于预警状态。
29.患者推着本实用新型的助行器向前移动,当前方1.5m范围内无障碍物时,雷达测距仪未检测障碍物,报警喇叭无响声,患者可继续朝既定方向向前移动。当前方障碍物到达助行器1.5m范围内时,左右两个雷达测距仪对障碍物的距离分别进行探测,电子控制台根据障碍物与左右两个雷达测距仪的不同距离,对障碍物方位和距离进行计算和识别,然后控制报警喇叭发出警示响声。根据障碍物的距离和方位不同,报警喇叭发出的警示音不同:距离前方障碍物越近,报警喇叭发出的声音越急促;障碍物越偏向左侧,左边喇叭报警声越响;障碍物越偏向右侧,右边喇叭报警声越响。患者通过听觉即可判断前方障碍物的距离和方位。
30.患者通过报警喇叭的报警声识别出障碍物的方位和距离后,可以助行器为轴心转动身体改变方向,在转动方向的过程中,报警喇叭根据障碍物的相对方向实时改变报警声,帮助患者实时了解障碍物方向和距离,从而判断出避开障碍物的前进方向。避开障碍物后,患者可继续朝既定方向前行。
31.以上仅为本实用新型较佳的实施例,并非因此限制本实用新型的实施方式及保护范围,对于本领域技术人员而言,应当能够意识到凡运用本实用新型说明书内容所作出的等同替换和显而易见的变化所得到的方案,均应当包含在本实用新型的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1