一种健步机器人的制作方法
1.本实用新型涉及行走辅助设备技术领域,尤其涉及一种健步机器人。
背景技术:
2.助行机器人包括辅助行走训练、固定框架行走训练及外骨骼助力行走训练三种方式,辅助行走训练是通过辅助行走来改善下肢的运动机能,将行走和康复训练结合,达到改善、恢复正常行走能力的目的。随着我国老龄化程度的加深,由老龄化带来的下肢健康问题也越来越突出。老年人由于生理机能的衰退会导致下肢的灵活性不断下降,此外,因脊髓损伤、脑卒等各种疾病引起的下肢运动性障碍的病人也显著增加,因此,如何满足老年人或病人的辅助行走训练需要成为了亟待解决的问题。现有用于辅助行走训练的器械大都采用框架式结构,用户的上肢通过器械得到一定的支撑,以此减小下肢的受力,器械的底部设置滚轮,用户行走时滚轮转动使器械可以同步移动。但是,现有用于辅助行走训练器械的外部一般未设置缓冲结构,当用户在小空间内进行行走训练或无力把控方向时,器械容易因碰撞导致外观受损。另外,由于器械发生碰撞时为刚性接触,若用户把控力量不足则容易被带倒,不利于保证辅助行走训练的安全性。
技术实现要素:
3.为了解决上述现有技术中存在的缺点和不足,本实用新型提供了一种健步机器人,有效解决因碰撞导致产品外观受损的缺陷,同时有利于提高辅助行走训练的安全性。
4.为了实现上述技术目的,本实用新型提供的一种健步机器人,包括支撑装置、手柄装置、行走装置及缓冲装置,手柄装置设于支撑装置的顶端,行走装置设于支撑装置的底端,行走装置包括前支脚、后支脚、设于前支脚底端的前脚轮及设于后支脚底端的后脚轮,缓冲装置设于支撑装置至少局部的外部及行走装置至少局部的外部,缓冲装置为柔性。
5.优选的,所述缓冲装置包括罩壳及脚套,罩壳设于支撑装置下端的外部,脚套套设于前支脚的外部,脚套的一端与罩壳连接、另一端与前脚轮配合。
6.优选的,所述罩壳设有向外凸出的凸圈,凸圈处设有避让前支脚的避让孔,脚套的一端套设于凸圈的外部。
7.优选的,所述脚套的一端与凸圈过盈配合;和/或,所述罩壳的外壁上设有位于凸圈外周的浅槽,脚套朝向罩壳端部位于浅槽中。
8.优选的,所述前脚轮可水平旋转的连接于前支脚,脚套的另一端套设于前脚轮的顶部;和/或,所述罩壳的内壁上设有凸筋。
9.优选的,所述罩壳包括固定在一起的前罩体与后罩体,前罩体与后罩体之间设有定位配合结构。
10.优选的,所述定位配合结构包括设于前罩体与后罩体两者之一的端面上的定位凸沿及设于另一者内壁上的定位凹槽,定位凸沿位于定位凹槽中;和/或,所述定位配合结构包括设于前罩体与后罩体两者之一上的定位卡扣及设于另一者上的定位卡槽,定位卡扣与
定位卡槽配合。
11.优选的,所述前罩体与后罩体通过螺钉连接,前罩壳的内壁上设有中空的凸柱,后罩壳的内壁上设有中空的插柱,插柱插设于凸柱中,螺钉穿经凸柱并拧紧于插柱中。
12.优选的,所述健步机器人包括外壳结构,外壳结构包括设于支撑装置外部的机壳及设于机壳顶部的盖壳,罩壳设于机壳的底部,罩壳的顶端连接于机壳的底端。
13.优选的,所述前脚轮与后脚轮各设有两个,两个后脚轮之间的距离大于两个前脚轮之间的距离;和/或,所述后脚轮内设有阻力电机。
14.采用上述技术方案后,本实用新型具有如下优点:
15.1、本实用新型提供的健步机器人,在支撑装置的外部及行走装置的外部加设了缓冲装置,由于缓冲装置为柔性,缓冲装置在用户借助机体进行行走训练发生碰撞的情况下能发生弹性变形而有效减轻碰撞对机体造成的冲击,有效避免机体因碰撞所受冲击过大将用户带倒的情况,有利于提高用户借助机体进行行走训练的安全性。另外,缓冲装置对支撑装置及行走装置具有保护作用,有利于减轻碰撞对支撑装置及行走装置造成的不良影响。再者,缓冲装置也能避免、减轻碰撞对产品外观造成的损伤。
16.2、用户借助机体进行行走训练时,缓冲装置的下部及前支脚是最容易发生碰撞的部位,据此,缓冲装置包括设于支撑装置下端外部的罩壳及套设于前支脚外部的脚套,合理设置缓冲装置的具体结构,更好的满足缓冲要求。
17.3、罩壳设置向外凸出的凸圈,脚套的一端套设于凸圈的外部,通过脚套的端部与凸圈的配合有利于提高罩壳与脚套之间的配合稳定性及脚套的位置稳定性,有利于避免脚套在受到碰撞时发生移动的情况。
18.4、脚套与凸圈之间采用过盈配合,有利于提高脚套与罩壳之间的配合稳定性,有效避免脚套受到碰撞而脱离罩壳。脚套朝向罩壳的端部位于罩壳外壁上的浅槽中,有利于使脚套与罩壳之间的配合处保持平整,有利于提高缓冲装置的外形美观度。
19.5、前脚轮可水平旋转连接于前支脚,便于用户在利用机体进行行走训练时根据训练环境及时调整移动方向。脚套的另一端套设于前脚轮的顶部,合理设置脚套与前脚轮之间的配合,避免脚套对前脚轮的转动造成干涉。罩壳的内壁上设置凸筋,通过凸筋可以提高罩壳的强度,可以减小罩壳受到碰撞时的变形程度,有利于进一步提高罩壳的缓冲能力。
20.6、罩壳采用分体配合式结构,有利于降低罩壳安装于支撑装置下端外部的难度。罩壳的前罩体与后罩体之间设置定位配合结构,通过定位配合结构能使前罩体与后罩体在组装时相互受到定位,有利于提高组装效率。另外,通过定位配合结构能提高前罩体与后罩体之间配合处的结构稳定性,避免罩壳因碰撞受力导致前罩体与后罩体错位、脱离等情况。
21.7、定位配合结构可以采用定位凸沿与定位凹槽配合的结构,也可以采用定位卡扣与定位卡槽配合的结构,合理设置定位配合结构的具体结构,使其满足前罩体与后罩体之间的定位配合要求。
22.8、组装前罩体与后罩体时,插柱先插设于凸柱中,然后将螺钉穿经凸柱并拧紧于插柱中,通过插柱与凸柱的插合使前罩体与后罩在组装时相互受到定位,有利于降低组装难度、提高组装效率。
23.9、外壳结构包括机壳及盖壳,机壳设于支撑装置的外部,盖壳设于机壳的顶部,罩壳的顶端与机壳的底端连接,通过外壳结构与罩壳的配合有利于提高产品的整体外形美观
度,也有利于保护机体的相关构件。
24.10、两个后脚轮之间的距离大于两个前脚轮之间的距离,使两个后脚轮之间的距离满足用户下肢所需活动空间的要求,避免用户在进行行走训练时踩碰到后脚轮导致摔倒的情况。后脚轮内设置阻力电机,阻力电机在用户进行行走训练时转动使后脚轮受到与转动方向相反的阻力,使机体在用户停止行走时能及时刹车,有利于提高训练的安全性。
附图说明
25.图1为实施例一健步机器人的整体侧视示意图;
26.图2为实施例一健步机器人的整体俯视示意图;
27.图3为实施例一健步机器人中部分构件的第一爆炸视图;
28.图4为实施例一健步机器人中部分构件的第二爆炸视图;
29.图5为实施例一健步机器人中部分构件的第三爆炸视图;
30.图6为实施例一健步机器人中显示装置与压力传感器的爆炸视图;
31.图7为实施例一健步机器人的外壳结构中盖壳的示意图;
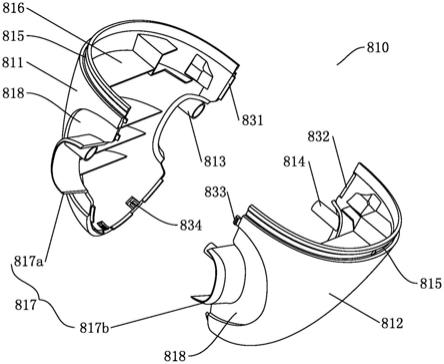
32.图8为实施例一健步机器人的缓冲装置中罩壳的爆炸视图。
33.图中,100-支撑装置,110-支架,111-固定台,112-限位框,120-支杆,121-支撑台,130-电动推杆,131-推杆,140-连接座,150-限位座,151-限位孔,160-架盖,200-行走装置,210-前支脚,220-后支脚,230-前脚轮,240-后脚轮,250-连板,300-手柄装置,310-柄壳,320-手柄,321-安装槽,330-柄套,400-电池,500-显示装置,510-基座,511-座壳,512-顶盖,513-后盖,520-显示屏,530-座板,610-控制装置,620-架板,630-压力传感器,640-弹簧线,650-线夹,660-无线通信模块,700-外壳结构,710-机壳,711-前壳体,712-后壳体,713-定位筋,720-盖壳,721-通孔,730-脚壳,731-内侧壳体,732-外侧壳体,741-定位块,742-定位槽,800-缓冲装置,810-罩壳,811-前罩体,812-后罩体,813-凸柱,814-插柱,815-卡接槽,816-凸筋,817-凸圈,817a-前圈体,817b-后圈体,818-浅槽,820-脚套,831-定位凸沿,832-定位凹槽,833-定位卡扣,834-定位卡槽。
具体实施方式
34.下面结合附图和具体实施例对本实用新型作进一步说明。需要理解的是,下述的“上”、“下”、“左”、“右”、“纵向”、“横向”、“内”、“外”、“竖直”、“水平”、“顶”、“底”等指示方位或位置关系的词语仅基于附图所示的方位或位置关系,仅为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置/元件必须具有特定的方位或以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
35.实施例一
36.如图1至图8所示,本实用新型实施例一提供的一种健步机器人,包括支撑装置100、手柄装置300、行走装置200及缓冲装置800,手柄装置300设于支撑装置100的顶端,行走装置200设于支撑装置的底端。行走装置200包括前支脚210、后支脚220、设于前支脚210底端的前脚轮230及设于后支脚220底端的后脚轮240,缓冲装置800设于支撑装置100至少局部的外部及行走装置200至少局部的外部,缓冲装置800为柔性。
37.由于缓冲装置为柔性,缓冲装置在用户借助机体进行行走训练发生碰撞的情况下
能发生弹性变形而有效减轻碰撞对机体造成的冲击,有效避免机体因碰撞所受冲击过大将用户带倒的情况,有利于提高用户借助机体进行行走训练的安全性。另外,缓冲装置对支撑装置及行走装置具有保护作用,有利于减轻碰撞对支撑装置及行走装置造成的不良影响。再者,缓冲装置也能避免、减轻碰撞对产品外观造成的损伤。
38.本实施例中,支撑装置100包括支架110、可升降设于支架110上的支杆120及用于驱动支杆120升降的电动推杆130,电动推杆130设于支架110上且电连接于电池400,电动推杆130包括推杆131,支杆120的底端通过连接座140与推杆131的顶端连接。连接座140设有与推杆131的顶端配合的孔,推杆131的顶端插设于该孔中,推杆131的顶端与连接座140通过螺钉固定在一起。连接座140还设有与支杆120的底端配合的孔,支杆120的底端插设于该孔中,支杆120的底端与连接座140之间通过螺钉固定在一起。
39.前支脚210与后支脚220均设有两根且分别位于支撑装置100的左右两侧,相应的,前脚轮230与后脚轮240也各设有两个,两个前脚轮230对称分布于支撑装置100的左右两侧,两个后脚轮240也对称分布于支撑装置100的左右两侧。前支脚210的一端与支架110固定连接,后支脚220的一端与支架110固定连接且位于前支脚210连接端的上方。前脚轮230优选采用带脚刹的万向轮,前脚轮230可水平旋转的连接于前支脚210,便于用户在利用机体进行行走训练时根据训练环境及时调整移动方向,后脚轮240通过连板250可转动设于后支脚220的末端。
40.缓冲装置800包括罩壳810及脚套820,罩壳810设于支撑装置100下端的外部,脚套820套设于前支脚210的外部,脚套820的一端与罩壳810连接、另一端与前脚轮230配合。
41.结合图8,罩壳810包括通过螺钉固定在一起的前罩体811及后罩体812,前罩壳810的内壁上设有中空的凸柱813,后罩壳810的内壁上设有中空的插柱814,凸柱813上的孔为阶梯孔,插柱814插设于凸柱813中,螺钉穿经凸柱813并拧紧于插柱814中将前罩体811与后罩体812固定在一起。
42.罩壳810设有向外凸出的凸圈817,凸圈817处设有避让前支脚210的避让孔,脚套820的一端套设于凸圈817的外部。本实施例中,前罩体811的左右两侧均设有向外凸出的前圈体817a,后罩体812的左右两侧均设有向外凸出的后圈体817b,前罩体811与后罩体812组装完成后,前圈体817a与后圈体817b结合形成凸圈817,前圈体817a与后圈体817b围合的空间形成供前支脚210穿经的避让孔。脚套820的一端通过与凸圈817的过盈配合套设于凸圈817的外部,另一端通过过盈配合套设于前脚轮230的顶部。
43.为了使脚套820与罩壳810之间的连接处更加美观,罩壳810的外壁上设有位于凸圈817外周的浅槽818,脚套820朝向罩壳810端部位于浅槽818中,使脚套820与罩壳810之间的配合处保持平整。
44.为了提高罩壳810的结构强度,罩壳810的内壁上设有凸筋816。本实施例中,前罩体811与后罩体812的内壁上均设有多条间隔分布的凸筋816。
45.为了提高罩壳810的结构稳定性,前罩体811与后罩体812之间设有定位配合结构。具体的,定位配合结构包括设于前罩体811上的定位凸沿831及设于后罩体812上的定位凹槽832,定位凸沿831设于前罩体811朝向后罩体812一侧的端面上且间隔设有多个,定位凹槽832设于后罩体812朝向前罩体811一侧的内壁上且与定位凸沿831一一对应分布,定位凸沿831位于定位凹槽832中。定位配合结构还包括设于后罩体812上的定位卡扣833及设于前
罩体811上的定位卡槽834,定位卡扣833设于后罩体812朝向前罩体811一侧的端面上且间隔设有多个,定位卡槽834设于前罩体811朝向后罩体812一侧的内壁上且与定位卡扣833一一对应分布,定位卡扣833卡于定位卡槽834中。定位配合结构不仅可以在组装前罩体811与后罩体812时实现两者之间的定位配合,也可以提高两者之间配合处的结构稳定性,避免罩壳810因碰撞受力导致前罩体811与后罩体812错位、脱离等情况。
46.为了提高机体的外形美观度,健步机器人还包括外壳结构700,外壳结构700包括设于支撑装置100外部的机壳710、设于机壳710顶部的盖壳720及设于后支脚220外部的脚壳730。本实施例中,机壳710采用分体式结构,包括通过螺钉固定在一起的前壳体711与后壳体712,前壳体711设于支架110的前侧,后壳体712设于支架110的后侧。结合图7,盖壳720通过卡接配合固定于机壳710的顶部,盖壳720上设有与支杆120配合的通孔721,支杆120穿经该通孔721设置。
47.罩壳810设于机壳710的底部,罩壳810的顶端连接于机壳710的底端。前罩体811与后罩体812顶侧的外壁上均设有卡接槽815,前罩体811与后罩体812组装完成后,两个卡接槽815结合形成一圈。前壳体711与后壳体712的底侧均设有朝内凸出的定位筋713,机壳710组装完成后,定位筋713嵌于定位槽742中,实现罩壳810的顶侧与机壳710的底侧之间的连接。
48.为了保证盖壳720的稳定性,机壳710顶侧的内壁上设有朝内凸出的定位块741,盖壳720的周向上设有供定位块741插入的定位槽742,定位块741插设于定位槽742中,使盖壳720受到轴向限位和周向限位。
49.本实施例中,脚壳730包括通过螺钉固定在一起的内侧壳体731与外侧壳体732,内侧壳体731设于对应后支脚220的内侧,外侧壳体732设于对应后支脚220的外侧,脚壳730朝向机壳710的一端与机壳通过槽沿配合实现平滑配合。
50.本实施例的健步机器人还包括电池400及控制装置610,为了提高机体的使用安全性,后脚轮240内设有阻力电机。用户进行行走训练时,阻力电机转动使后脚轮240受到与转动方向相反的阻力,使机体在用户停止行走时能及时刹车。阻力电机通过接电线电连接于电池400,同时通过信号线信号连接于控制装置610。
51.用户通过本实施例的健步机器人进行行走训练时,用户位于机体的后侧,为了避免用户在进行行走训练时踩碰到后脚轮240导致摔倒的情况,两个后脚轮240之间的距离大于两个前脚轮230之间的距离,使两个后脚轮之间的距离满足用户下肢所需活动空间的要求。
52.本实施例中,支架110的竖向部位大致呈板状,电动推杆130及连接座140设于支架110的前侧。为了提高连接座140及电动推杆130的稳定性,支撑装置100还包括架盖160,架盖160通过螺钉固定于支架110的前侧,电动推杆130及连接座140设于架盖160与支架110之间。通过架盖160与支架110的配合使连接座140受到有效的限位,有利于提高连接座140的结构稳定性及移动稳定性,从而有利于提高电动推杆130通过连接座140带动支杆120升降的稳定性。
53.为了装设电池400,支架110侧部设有用于装设电池400的限位框112,电池400插设于限位框112中。本实施例中,限位框112设于支架110的前侧,且电池400位于架盖160的前侧。
54.结合图6,健步机器人包括设于支撑装置100顶部的显示装置500,显示装置500包括基座510、设于基座510上的显示屏520及设于基座510内的座板530,支杆120的顶端伸入基座510内且设有支撑台121,座板530通过螺钉锁紧于支撑台121的顶部。本实施例中,基座510采用分体式结构,包括座壳511、顶盖512及后盖513,顶盖512固定于座壳511的顶部,显示屏520嵌装于顶盖512中,后盖513通过螺钉固定连接于座壳511的后侧,支杆120的顶端伸入基座510内的后侧。
55.基座510内设有位于显示屏520后侧的压力传感器630,压力传感器630固定于座板530上,手柄装置300连接于压力传感器630,显示装置500位于手柄装置300的下方。本实施例中,手柄装置300采用分体式结构,包括柄壳310、手柄320及柄套330,手柄320通过压力传感器630连接于支撑装置100的顶端,柄壳310固定于手柄320的底部,柄套330包覆于手柄320的外部。具体的,手柄320通过螺钉与压力传感器630固定连接,柄壳310通过螺钉固定于手柄320的底部。
56.健步机器人还包括控制装置610,控制装置610通过架板620设于支架110的后侧,显示屏520及压力传感器630信号连接于控制装置610,同时,显示屏520及压力传感器630电连接于电池400。为了简化布线,显示屏520与压力传感器630同时通过弹簧线640实现电连接于电池400且信号连接于控制装置610的目的,弹簧线640包含接电线和信号线,弹簧线640的两端通过线夹650进行固定。为了使弹簧线640能隐藏设置,支杆120设置为轴向中空的结构,弹簧线640设于支杆120内部。
57.为了提高支杆120的结构稳定性及升降稳定性,支撑装置100还包括设于支架110顶部的限位座150,限位座150设有与支杆120配合的限位孔151,支杆120穿经限位孔151设置。本实施例中,支架110的顶部弯折形成固定台111,限位座150插设于固定台111上并通过螺钉与固定台111锁紧。
58.为了提高机体的稳定性,支撑装置100采用相对于竖向倾斜布置的结构,支撑装置100的顶端相对于底端向后倾斜,支杆120的升降方向与支撑装置100的长度方向一致设置。为了更好的满足用户的训练要求,显示装置500的平面方向与支杆120的升降方向优选的垂直设置,手柄装置300也大致与支杆120的升降方向优选的垂直设置,手柄装置300相对于水平方向倾斜设置且手柄装置300的前部高于后部。本实施例中,手柄装置300的后部所处的平面方向与支杆120的升降方向大致垂直设置,手柄装置300的前部相对于后部向上翘起。手柄装置300的后部与水平方向之间设有夹角α,15
°
≤α≤30
°
。手柄装置300的前部相对于后部上翘的角度为β,20
°
≤β≤40
°
。本实施例中,手柄装置300的后部与水平方向之间的夹角α指手柄装置后部中心线的切向方向与水平方向之间的夹角,手柄装置300的前部相对于后部上翘的角度β指手柄装置前部中心线的切线方向与手柄装置后部中心线的切向方向之间的夹角。具体的,α优选设置为22
°
,β优选设置为34
°
。
59.为了便于用户在训练时查看显示屏520所显示的内容,手柄装置300设有一圈,显示屏520的至少局部位于手柄装置300内圈的下方。优选的,显示屏520位于手柄装置300内圈沿支杆120升降方向的正下方,避免手柄装置对显示屏造成视线阻碍。
60.为了便于用户通过移动终端控制机体,健步机器人还设有无线通信模块,无线通信模块信号连接于显示屏520的主板。无线通信模块包括天线660,即天线660为无线通信模块的构成单元。为了避免天线对装有心脏起搏器的用户造成不利影响,天线660设于手柄装
置300前侧的内部。本实施例中,手柄320的前侧设有远离支杆的安装槽321,天线660设于安装槽321内。移动终端可以通过无线通信模块与显示屏520建立双向无线通信连接,有助于提高机体的智能化。
61.为了提高机体的使用安全性,手柄装置300的竖向投影面位于前脚轮230与后脚轮240之间,用户在训练时握持手柄装置施加的竖向作用力位于行走装置200的范围内,有效避免因竖向作用力位于行走装置的范围外导致机体侧翻而带倒用户的使用风险。具体的,结合图2,手柄装置100的竖向投影面位于前支脚210的末端与后支脚220的末端之间。
62.使用本实施例的健步机器人进行行走训练时,先根据用户的身高调整支撑装置100的高度,使手柄装置300与显示装置500的高度能与用户的身高适配。训练过程中,压力传感器630采集手柄装置300的受力数据并发送给控制装置610进行分析、判断,行走距离、行走速度、上肢施力情况的数据可以在显示屏520上显示。用户也可以利用移动终端通过无线通信模块向显示屏520发送工作指令,也可以利用移动终端获知用户的训练数据等内容。
63.可以理解的是,推杆131的顶端与连接座140之间也可以通过其他方式实现固定连接,如焊接等。
64.可以理解的是,支杆120的底端与连接座140之间也可以通过其他方式实现固定连接,如焊接等。
65.可以理解的是,限位座150也可以通过其他方式固定于支架110上,如焊接、螺纹连接等。
66.可以理解的是,也可以将电动推杆130、连接座140、架盖160及电池400设于支架110的后侧,将控制装置610设于支架110的前侧。
67.可以理解的是,柄套330可以采用tpu等合适材质制成。
68.可以理解的是,手柄装置300的后部与水平方向之间的夹角α也可以设为15
°
、18
°
、20
°
、24
°
、27
°
、30
°
等其他合理的角度值。
69.可以理解的是,手柄装置300的前部相对于后部上翘的角度β也可以设置为20
°
、25
°
、28
°
、30
°
、35
°
、38
°
、40
°
等其他合理的角度值。
70.可以理解的是,无线通信模块可以采用蓝牙通信模块、wifi通信模块、zigbee通信模块等无线通信模块。
71.可以理解的是,也可以将整个无线通信模块安装在手柄320前侧的安装槽321内。
72.可以理解的是,移动终端可以采用手机、平板电脑等电子产品。
73.可以理解的是,移动终端也可以通过无线通信模块与显示屏520之间建立单向无线通信连接,移动终端可以通过无线通信模块向显示屏520单向发送工作指令。
74.可以理解的是,机壳710顶侧内壁上的定位块741与盖壳720周向上的定位槽742的设置位置可以互换。
75.可以理解的是,脚壳730可以与机壳710结合设置,具体的,脚壳730的外侧壳体732可以与机壳的前壳体711一体成型,脚壳730的内侧壳体731可以与机壳的后壳体712一体成型。
76.可以理解的是,罩壳810的顶侧与机壳710的底侧之间也可以通过卡扣与卡槽配合的结构或螺钉等其他合适的结构实现连接。
77.可以理解的是,定位凸沿831与定位凹槽832的设置位置可以互换。
78.可以理解的是,定位卡扣833与定位卡槽834的设置位置可以互换。
79.可以理解的是,在定位凸沿831与定位凹槽832配合能满足前罩体811与后罩体812之间定位配合要求的前提下,可以取消定位卡扣833与定位卡槽834的设置。
80.可以理解的是,在定位卡扣833与定位卡槽834配合能满足前罩体811与后罩体812之间定位配合要求的前提下,可以取消定位凸沿831与定位凹槽832的设置。
81.可以理解的是,在脚套820与凸圈817配合长度较大的情况下,脚套720的端部与凸圈817之间也可以采用间隙配合。
82.可以理解的是,也可以取消罩壳810外壁上浅槽818的设置。
83.可以理解的是,在罩壳810的厚度较大的情况下,也可以取消凸筋816的设置。
84.可以理解的是,罩壳810与脚套820可以采用tpe等合适材质。
85.除上述优选实施例外,本实用新型还有其他的实施方式,本领域技术人员可以根据本实用新型作出各种改变和变形,只要不脱离本实用新型的精神,均应属于本实用新型权利要求书中所定义的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1