一种新型人体仿生手部骨骼结构的制作方法
1.本实用新型具体是一种新型人体仿生手部骨骼结构,涉及仿生装置相关领域。
背景技术:
2.仿生手作为仿生机器人的关键零部件之一,是仿生机器人与环境进行交互的主要执行部件,因此仿生手的性能极大影响仿生机器人的性能,在仿生手上,需要安装有专用的手指骨骼结构,来实现抓取时的弯曲,便于对物件进行稳定的夹持。
3.在现有的人体仿生手部骨骼结构进行实际使用过程中,由于前端夹持位置跟随后端驱动件进行弯曲,但前端夹持部分长度固定,面对较长或较宽物件夹持时,稳定性不足,且在对整体骨骼表面加装覆盖防护层时较为不便。
技术实现要素:
4.因此,为了解决上述不足,本实用新型在此提供一种新型人体仿生手部骨骼结构。
5.本实用新型是这样实现的,构造一种新型人体仿生手部骨骼结构,该装置包括连接座,所述连接座内前端与摆动件进行铰接,所述摆动件另一端与弯曲件相铰接,所述弯曲件外侧通过第一拉杆与摆动件相接,所述摆动件外侧通过第二拉杆与连接座相接,所述弯曲件内前端设有稳固结构,所述摆动件内上端设有辅助机构,所述稳固结构包括固定件、连接柱和调节件,所述固定件外侧上端通过连接柱与第一拉杆相接,所述固定件前端套接有调节件。
6.优选的,所述调节件包括外壳、防护层、连杆和限位球,所述外壳外侧贴合有防护层,所述外壳内侧中部固定有连杆,所述连杆后端通过限位球伸入至固定件内部。
7.优选的,所述防护层包括硅胶层、泡沫层和基底层,所述硅胶层内侧与泡沫层相贴,所述泡沫层内侧通过基底层贴合在外壳外侧。
8.优选的,所述辅助机构包括壳体、转动辊、覆盖面层、出口和贴合层,所述壳体嵌入至摆动件内上端,所述壳体内中部设有转动辊,所述转动辊外侧与覆盖面层一端相接,所述覆盖面层另一端贯穿开设在壳体顶部的出口,所述覆盖面层内侧粘接有贴合层。
9.优选的,所述外壳内侧与固定件外侧接触面光滑。
10.优选的,所述固定件内前端中部开设有滑槽,并且滑槽前端位置上下两端逐渐向中部倾斜。
11.优选的,所述连杆和限位球活动嵌入至所述滑槽内中部。
12.优选的,所述覆盖面层外侧设有粘黏层,并且粘黏层表面贴合有离型膜。
13.优选的,所述外壳采用不锈钢材质。
14.优选的,所述限位球采用合金钢材质。
15.本实用新型具有如下优点:本实用新型通过改进在此提供一种新型人体仿生手部骨骼结构,与同类型设备相比,具有如下改进:
16.优点1:本实用新型所述一种新型人体仿生手部骨骼结构,通过在弯曲件前端设有
稳固结构,稳固结构内部的固定件可跟随弯曲件进行弯曲,进行夹持,而固定件前端设有调节件,可进行长度调节,提高夹持的长度,增加稳定性,而调节件外侧设有防护层,防护层外侧设有硅胶层,硅胶层接触被夹持物件提高摩擦力,在硅胶层内侧的泡沫层则进行稳定的缓冲。
17.优点2:本实用新型所述一种新型人体仿生手部骨骼结构,通过在摆动件上端设有辅助机构,辅助机构内可拉出覆盖面层覆盖在骨骼上,覆盖面层顶部设有粘黏层可与外部的防护面层进行连接,方便稳定操作。
附图说明
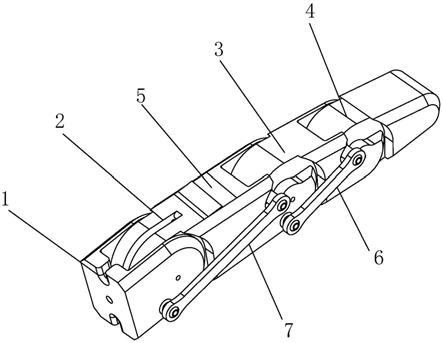
18.图1是本实用新型结构示意图;
19.图2是本实用新型稳固结构示意图;
20.图3是本实用新型调节件结构示意图;
21.图4是本实用新型防护层局部结构示意图;
22.图5是本实用新型辅助机构结构示意图。
23.其中:连接座-1、摆动件-2、弯曲件-3、稳固结构-4、辅助机构-5、第一拉杆-6、第二拉杆-7、固定件-41、连接柱-42、调节件-43、外壳-431、防护层
ꢀ‑
432、连杆-433、限位球-434、硅胶层-4321、泡沫层-4322、基底层-4323、壳体-51、转动辊-52、覆盖面层-53、出口-54、贴合层-55、滑槽-411。
具体实施方式
24.下面将结合附图1-5对本实用新型进行详细说明,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
25.请参阅图1,本实用新型通过改进在此提供一种新型人体仿生手部骨骼结构,包括连接座1,连接座1内前端与摆动件2进行铰接,摆动件2另一端与弯曲件3相铰接,弯曲件3外侧通过第一拉杆6与摆动件2相接,摆动件2外侧通过第二拉杆7与连接座1相接,弯曲件3内前端设有稳固结构4,摆动件2内上端设有辅助机构5。
26.请参阅图2,本实用新型通过改进在此提供一种新型人体仿生手部骨骼结构,稳固结构4包括固定件41、连接柱42和调节件43,固定件41外侧上端通过连接柱42与第一拉杆6相接,固定件41前端套接有调节件43。
27.请参阅图3,本实用新型通过改进在此提供一种新型人体仿生手部骨骼结构,调节件43包括外壳431、防护层432、连杆433和限位球434,外壳431外侧贴合有防护层432,外壳431内侧中部固定有连杆433,连杆433后端通过限位球434伸入至固定件41内部。
28.请参阅图4,本实用新型通过改进在此提供一种新型人体仿生手部骨骼结构,防护层432包括硅胶层4321、泡沫层4322和基底层4323,硅胶层4321内侧与泡沫层4322相贴,泡沫层4322内侧通过基底层4323贴合在外壳431外侧,外壳431内侧与固定件41外侧接触面光滑,滑动流畅,效果好,外壳431采用不锈钢材质,防止长期使用导致锈化,固定件41内前端中部开设有滑槽411,并且滑槽411前端位置上下两端逐渐向中部倾斜,连杆433和限位球
434活动嵌入至滑槽411内中部,滑动流畅,稳定性好,限位球434采用合金钢材质,强度高,稳定性强。
29.请参阅图5,本实用新型通过改进在此提供一种新型人体仿生手部骨骼结构,辅助机构5包括壳体51、转动辊52、覆盖面层53、出口54和贴合层55,壳体51嵌入至摆动件2内上端,壳体51内中部设有转动辊52,转动辊52外侧与覆盖面层53一端相接,覆盖面层53另一端贯穿开设在壳体51顶部的出口54,覆盖面层53内侧粘接有贴合层55,覆盖面层53外侧设有粘黏层,并且粘黏层表面贴合有离型膜,方便进行稳定的粘黏。
30.本实用新型通过改进提供一种新型人体仿生手部骨骼结构,其工作原理如下;
31.第一,当需要对手部的骨骼结构进行使用时,首先将连接座1连接到驱动手掌位置,接着即可为其提供所需的驱动力;
32.第二,驱动连接座1实现其内部的摆动件2进行摆动,摆动件2通过第二拉杆7对弯曲件3进行拉动,然后弯曲件3受力即可通过第二拉杆7拉动前端的固定件41,实现整体弯曲夹持;
33.第三,当需要提高夹持的长度时,使用者施加力给调节件43,然后将其拉出然后内部的连杆433以及限位球434即可在滑槽411内进行滑动,直到限位件434卡在滑槽411内前端即可;
34.第四,在外壳431外侧设有防护层432,防护层432外侧设有硅胶层4321,硅胶层4321在接触物件时,摩擦力大,夹持稳定,而内侧设有泡沫层4322,泡沫层4322柔软性好,缓冲效果好;
35.第五,若需要外加防护面层与整体骨骼进行覆盖时,使用者可以施加力给覆盖面层53一端,将其拉出壳体51,接着通过内侧的贴合层55贴合在骨骼顶部,接着揭下覆盖面层53一侧的离型膜,然后即可将外部的防护面层与覆盖面层53一侧的粘黏层进行粘接,贴合后完成覆盖。
36.本实用新型通过改进提供一种新型人体仿生手部骨骼结构,通过在弯曲件3 前端设有稳固结构4,稳固结构4内部的固定件41可跟随弯曲件3进行弯曲,进行夹持,而固定件41前端设有调节件43,可进行长度调节,提高夹持的长度,增加稳定性,而调节件43外侧设有防护层432,防护层432外侧设有硅胶层4321,硅胶层4321接触被夹持物件提高摩擦力,在硅胶层4321内侧的泡沫层4322则进行稳定的缓冲;在摆动件2上端设有辅助机构5,辅助机构5内可拉出覆盖面层53覆盖在骨骼上,覆盖面层53顶部设有粘黏层可与外部的防护面层进行连接,方便稳定操作。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1