应用于乳房超声检查的高精度运动控制设备的制作方法
1.本实用新型涉及医疗超声设备领域,尤其涉及一种应用于乳房超声检查的高精度运动控制设备。
背景技术:
2.在医学中,对于乳房进行医学检查时,会使用到一种医疗超声设备,并通过医疗超声设备对患者乳房进行超声检测,而在该医疗超声设备使用的过程中,需要对设备中的检测容器进行三维的转动,从而达到多方位扫查采集数据,通过数据建模来多角度查看病灶。
3.其中,检测容器的转动和移动精度要求高,但是现有技术中由于机械运动装置存在误差,无法对检测容器的转动和移动进行高精度的控制,降低了检测数据的精确性,不利于患者的超声检测。
技术实现要素:
4.本实用新型的目的在于提供一种对检测容器的转动和移动进行高精度控制、增加检测数据的准确性的应用于乳房超声检查的高精度运动控制设备。
5.为解决上述技术问题,本实用新型提供了一种应用于乳房超声检查的高精度运动控制设备,包括半球支架;还包括用于控制所述半球支架水平旋转的旋转装置、用于控制所述半球支架垂直移动的升降装置以及控制模块;所述控制模块用于对所述旋转装置以及升降装置进行校准调节。
6.进一步的,所述控制模块还包括设于所述旋转装置上的编码器;所述编码器用于测量旋转装置的旋转角度,控制模块基于旋转角度和内设的编码器对旋转装置进行校正调节。
7.进一步的,所述控制模块还包括设于所述升降装置上的光栅尺;所述光栅尺用于测量升降装置的移动高度,控制模块基于移动高度和内设的光栅尺对升降装置进行校正调节。
8.进一步的,所述控制模块包括mcu控制单元;所述mcu控制单元对旋转装置以及升降装置进行控制。
9.进一步的,所述旋转装置一侧设有旋转电机;所述旋转电机带动旋转装置进行水平方向的旋转。
10.进一步的,还包括设于所述旋转装置上的同步带轮、用于连接所述同步带轮和所述旋转电机的同步带。
11.进一步的,所述升降装置一侧设有升降电机;所述升降电机带动升降装置进行垂直方向的移动。
12.进一步的,所述控制模块还包括驱动板;所述驱动板上连接有mcu控制单元、电机硬件接口、编码器硬件接口以及光栅尺硬件接口。
13.本实用新型通过半球支架对患者乳房扫查并进行数据采集,在需要对半球支架进
行三维的转动和移动时,通过旋转装置带动半球支架进行水平角度的转动,同时通过升降装置带动半球支架进行垂直方向上的升降移动,以达到对半球支架进行三维转动和移动的控制;当旋转装置和升降装置对半球支架进行控制时,旋转装置的转动角度数据以及升降装置的移动高度数据会通过控制模块进行采集,并通过控制模块对转动角度以及移动高度的误差进行校准,使得经过控制模块的校准后,半球支架的转动角度以及移动高度的精度更高,提高了对半球支架三维转动和移动的高精度控制,进而增加了检测数据的准确性。
附图说明
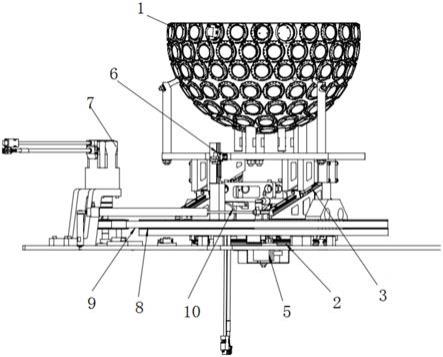
14.图1是本实用新型的结构示意图。
15.图2是本实用新型中控制模块的结构示意图。
16.附图标记:1、半球支架;2、旋转装置;3、升降装置;4、mcu控制单元;5、编码器;6、光栅尺;7、旋转电机;8、同步带轮;9、同步带;10、升降电机;11、驱动板;12、电机硬件接口;13、编码器硬件接口;14、光栅尺硬件接口。
具体实施方式
17.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员所获得的所有其他实施例,都属于本实用新型保护的范围。
18.本领域技术人员应理解的是,在本实用新型的揭露中,术语“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系是基于附图所示的方位或位置关系,其仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此上述术语不能理解为对本实用新型的限制。
19.可以理解的是,术语“一”应理解为“至少一”或“一个或多个”,即在一个实施例中,一个元件的数量可以为一个,而在另外的实施例中,该元件的数量可以为多个,术语“一”不能理解为对数量的限制。
20.如图1
‑
2所述,本实用新型提供了一种应用于乳房超声检查的高精度运动控制设备,包括半球支架1;还包括用于控制所述半球支架1水平旋转的旋转装置2、用于控制所述半球支架1垂直移动的升降装置3以及控制模块;所述控制模块用于对所述旋转装置2以及升降装置3进行校准调节。
21.通过半球支架对患者乳房扫查并进行数据采集,在需要对半球支架1进行三维的转动和移动时,通过旋转装置2带动半球支架1进行水平角度的转动,同时通过升降装置3带动半球支架1进行垂直方向上的升降移动,以达到对半球支架1进行三维转动和移动的控制;当旋转装置2和升降装置3对半球支架1进行控制时,旋转装置2的转动角度数据以及升降装置3的移动高度数据会通过控制模块进行采集,并通过控制模块对转动角度以及移动高度的误差进行校准,使得经过控制模块的校准后,半球支架1的转动角度以及移动高度的精度更高,提高了对半球支架三维转动和移动的高精度控制,进而增加了检测数据的准确性。
22.具体的,在半球支架中设置有tas,并通过tas对患者乳房扫查并进行数据采集。
23.优选的,所述控制模块包括mcu控制单元4;所述mcu控制单元4对旋转装置2以及升降装置3进行控制。
24.具体的,旋转装置2的转动角度数据被采集后,mcu控制单元4读取采集后的数据,并将采集数据和实际要求运动角度作对比,当发现目标运动角度不一致时,mcu控制单元4根据目标角度和实际获得角度的差值进行运算,将旋转装置2的误差数据计算出来,并让旋转装置2根据误差数据再次运动到目标位置,采用逐次逼近的方式校正旋转装置以及半球支架1的运动角度,最终在规定的次数中运动至指定目标位置,保证了角度误差符合设计的需求,增加了对旋转装置2的控制准确性;同时mcu控制单元4对于升降装置3的控制方式与上述旋转装置2相同。
25.优选的,所述控制模块还包括设于所述旋转装置2上的编码器5;所述编码器5用于测量旋转装置2的旋转角度,控制模块基于旋转角度和内设的编码器5对旋转装置2进行校正调节。
26.具体的,编码器5设置于旋转装置2的底部,在旋转装置2带动半球支架1水平转动时,编码器5将角度的位移转换成电信号,同时编码器5会对转换后得到的电信号进行采集并存储,随后mcu控制单元4读取编码器5中存储的电信号,进而判断旋转装置2的转动角度是否精确,当实际旋转角度和要求旋转角度不一致时,控制模块对两者之间的差值进行运算,并控制旋转装置2再次转动,使得旋转装置2最终带动半球支架1移动至指定角度;在本实施例中,采用高精度校准编码器,在其他实施例中,编码器的精度要求可以根据具体的使用需求进行改变,此处不做具体限制。
27.优选的,所述控制模块还包括设于所述升降装置上的光栅尺6;所述光栅尺6用于测量升降装置3的移动高度,控制模块基于移动高度和内设的光栅尺6对升降装置3进行校正调节。
28.具体的,光栅尺6设置在升降装置上侧,在升降装置3带动半球支架1进行垂直方向的移动时,光栅尺6上的读数头会在光栅尺上滑动,通过读数头的初始位置以及滑动后的位置读出移动的距离,进而对升降装置3的移动高度进行测量,随后光栅尺6输出脉冲信号给mcu控制单元4,mcu控制单元4通过脉冲信号计算升降装置3以及半球支架1在垂直方向上的高度差值,并根据实际需要运动的高度进行对比是否符合精度的范围,当没有在范围内时,mcu控制单元4利用逐次逼近的校正方式控制升降装置3以及半球支架1进行高度校正。
29.优选的,所述旋转装置2一侧设有旋转电机7;所述旋转电机7带动旋转装置2进行水平方向的旋转。
30.具体的,在旋转装置2需要进行转动时,启动旋转电机7带动旋转装置2进行转动,同时在mcu控制单元4检测出误差时,mcu控制单元4会把旋转电机7的误差步数计算出来,发送给旋转电机并让旋转电机再次按照计算的误差步数运动至目标位置;在本实施例中,旋转电机7采用高精度步进电机。
31.优选的,还包括设于所述旋转装置2上的同步带轮8、用于连接所述同步带轮8和所述旋转电机7的同步带9。
32.具体的,当旋转电机7启动时,会带动同步带9进行转动,进而通过同步带9带动同步带轮8进行转动,使得同步带轮8驱动旋转装置2进行转动,同时由于半球支架设置在旋转
装置上,使得半球支架本旋转装置带动进行转动,增加了旋转电机7与旋转装置2之间的配合精确性。
33.优选的,所述升降装置3一侧设有升降电机10;所述升降电机10带动升降装置3进行垂直方向的移动。
34.具体的,在升降装置3需要进行垂直方向的移动时,启动升降电机10带动升降装置3以及半球支架1进行垂直方向的移动,当mcu控制模块4检测到移动后的高度出现误差时,mcu控制模块4控制升降电机10再次转动,使得和半球支架1移动至指定高度;在本实施例中,升降电机10采用高精度步进电机。
35.在本方案中,升降装置内设置有滚珠丝杆、升降楔块以及升降导向轴,滚珠丝杆和升降楔块之间通过螺纹连接,当升降电机转动时,带动滚珠丝杆进行转动,并通过滚珠丝杆和升降楔块之间的螺纹连接带动升降楔块进行移动,随后通过升降楔块推动半球支架进行垂直方向的移动,同时在半球支架移动时可以通过升降导向轴对半球支架进行导向,避免半球支架移动位置偏移的情况。
36.优选的,所述控制模块还包括驱动板11;所述驱动板11上连接有mcu控制单元4、电机硬件接口12、编码器硬件接口13以及光栅尺硬件接口14。
37.具体的,旋转电机7以及升降电机10均通过数据线连接至电机硬件接口12处,编码器5连接至编码器硬件接口13处,光栅尺6连接至光栅尺硬件接口14处,通过mcu控制单元4对编码器硬件接口13以及光栅尺硬件接口14收集编码器5以及光栅尺6的数据,并通mcu控制单元4将误差计算后的数据输入值电机硬件接口12处,进而控制旋转电机8以及升降电机10进行校准。
38.根据上述优选实施例,提供一实施方式:本实施例中,设计规定旋转角度需要小于0.01
°
,16位精度误差,升降高度精度要小于5um误差;高精度校准设备编码器(精度为23bit,编码器分辨率角度0.0014
°
),光栅尺(精度3um,分辨率1um)。
39.当旋转电机8转动时编码器5跟随旋转,可以通过mcu控制单元4读取编码器5的旋转角度数据并跟实际要求运动角度做对比,发现目标运动角度与获得的角度不一致时,mcu控制单元4会根据目标角度和实际获得角度的差值进行运算,把旋转电机8的误差步数计算出来,发送给旋转电机8让旋转电机8再次按计算的误差步数运动到目标位置,进而采用逐次逼近的方式校正半球支架1的运动角度,最终在规定的次数中完成运动指定目标位置,同时角度误差也符合设计需求,停止旋转电机8运动。同理,在半球支架1垂直升降时,读数头会在光栅尺6上滑动,光栅尺6会输出脉冲信号给mcu控制单元4,mcu控制单元4会通过脉冲信号计算半球支架1在垂直方向上发生的高度差值,并跟实际需要运动的高度进行对比是否符合精度范围,没有在范围内时,mcu控制单元4会利用校正算法进行校正。
40.本实用新型不局限于上述最佳实施方式,任何人在本实用新型的启示下都可得出其他各种形式的产品,但不论在其形状或结构上作任何变化,凡是具有与本技术相同或相近似的技术方案,均落在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1