集成称重与电动功能的病床系统的制作方法
1.本实用新型涉及集成称重与电动功能的病床系统。
背景技术:
2.随着人口老龄化程度的不断加快,人们对于医护工作的依赖和需求日益加大,病床的改进和创新不仅可以更好地服务于病患和老年人,也使得医护人员的工作更加方便和轻松。本实用新型专利研究的的多功能病床能够完成起背上升、起背下降、腿部向上、腿部向下、整体向上、整体向下、前倾、后倾、椅子位、电动cpr等功能。控制系统主要由单片机执行。arm触摸屏和手机移动客户端可以通过无线通讯方式向下位机发送动作指令,其中手机客户端能够实现远距离控制,单片机接收到命令后完成命令的分析和动作的执行。硬件设计部分完成了以单片机为核心的控制电路设计、驱动电路设计、arm的选型等,并且给出了硬件电路原理图。软件设计部分完成了单片机程序的开发应用程序开发环境的搭建,给出了软件设计程序流程图。采用可调占空比的pwm技术控制推杆运动,可以调节推杆速度。最后对整个控制系统进行了功能测试与分析。
3.病人的体重现在也成为了医护人员对病人的身体情况做出判断的一个重要因素,所以本实用新型专利研究的多功能病床除上述功能外还集成了称重系统。通过单片机进行通讯,将病人的体重发送给护士板,护士板通过显示屏播报出来,还可以通过体重的变化监测病人的离床情况。
4.本实用新型针对现有病床没有称重功能的现象,使用adc芯片进行adc转换,将床体的重量转化为电压变化,单片机通过电压采集进行模数转化,将床体的重量通过485通讯发送给护士板,由护士板的lcd屏幕展现出来。
技术实现要素:
5.本实用新型所要解决的技术问题总的来说是提供一种集成称重与电动功能的病床系统。
6.一种集成称重与电动功能的病床系统,包括控制盒的主控模块;主控模块分别电连接有护士板的显示模块、称重系统、手控器、安装在护栏上的护栏开关及设置在病床上的马达组;
7.手控器、护栏开关及护士板发送控制指令给485芯片,控制指令经过485芯片协议转换后将控制指令传送给控制盒的主控模块,主控模块输出执行指令,使得马达组和/或称重系统执行相应的动作;
8.控制盒包括作为主控模块的单片机ic8;单片机ic8输入端电连接有dc-dc模块的输出端,单片机ic8输出端分别电连接有蜂鸣器ha1及继电器控制模块;
9.继电器控制模块电连接马达组和/或称重系统的控制电路。
10.作为上述技术方案的进一步改进:
11.显示模块显示称重数据、床板倾斜或摆动角度、马达控制参数和/或床体的重量;
12.马达组包括布置在病床上的若干马达。
13.护栏开关包括设置在病床上的若干按压锁键和对应的功能按键。
14.主控模块具有断电记忆模块,断电记忆模块读取并记录设置在马达上霍尔传感器感应的马达动作位置及状态。
15.主控模块通过电路选择开关分别电连接有蓄电池与市电,当市电断路,电路选择开关电连接到蓄电池并延时断开。
16.单片机ic8脚1分别外接接头j2及电源;脚6通过电容c80接地,脚4与脚1之间连接电容c78;脚4与脚5之间连接;脚7与脚8连接后分别外接电源及通过隔离电容c83接地;
17.单片机ic8具有hl3-a,rxd2,txd2,key1-3,ctr1,int1,data通道;
18.单片机ic8脚32分别通过c93及电阻r138接地,还通过电阻r136电连接有三极管q10的集电极;电源bat+通过二极管d43接三极管q10发射极,三极管q10发射极与基极之间电连接有电阻r127;
19.三极管q10的基极通过电阻r135接三极管q11的集电极,三极管q11的发射极接地,三极管q11基极一路通过电阻r140接地,一路通过电阻r137接单片机ic8脚33,以进行电池电量检测及电池过放保护。
20.蜂鸣器ha1脚1接电源,脚2接三极管q1集电极,三极管q1发射极接地,三极管q1基极分别通过电阻r133接入单片机ic8端脚17且通过电阻r158接地;三极管q1用于控制蜂鸣器ha1负极的通断。
21.护士板电路包括dc-dc模块、独立键盘、led指示灯、lcd屏幕;dc-dc模块的输入端电连接电源,dc-dc模块输出端电连接led指示灯及lcd屏幕;独立键盘、led指示灯及lcd屏幕分别电连接单片机ic8的对应端口;
22.lcd屏幕通过ttl通道与称重系统通讯,实时获得称重数据并显示重量信息。
23.在控制盒与手控器之间通过一根十三针防水直头尾端塑壳弹簧信号连接线相连,该连接线满足rohs2.0和cp65标准要求,其a向端连接控制盒,b向端连接手控器,连接线有防误插设计;控制盒由连接线的第7脚和第14脚向手控器供电,控制盒与手控器通过连接线的第5脚和第10脚进行485通信。
24.本实用新型根据设计需要,主控模块采用485通讯技术和脉宽调制技术完成对系统整体进行控制的需要;考虑功能效率等影响因素完成对硬件各个模块的选型和设计。采用485芯片的通讯模式设置,芯片外围电路设计,pwm波输出电路以及继电器与mos相结合的驱动电路的原理设计和功能实现等。
25.单片机软件设计在keil软件编程环境下完成,代码以stm公司推出的hal库为基础。
26.为解决上述问题,本实用新型所采取的技术方案是:
27.本实用新型以单片机为基础,研究开发一种集成称重与电动功能的病床系统,使其能够更好的服务于病人和医护人员,使他们在使用过程中可以有更好的体验,能生活得更好,并且在为他们带来方便和舒适的同时,也使护理人员和子女们能够更轻松,更方便,更放心,而且还能让医护人员可以实时的监测到病人的体重体征。
28.本实用新型设计合理、成本低廉、结实耐用、安全可靠、操作简单、省时省力、节约资金、结构紧凑且使用方便。
附图说明
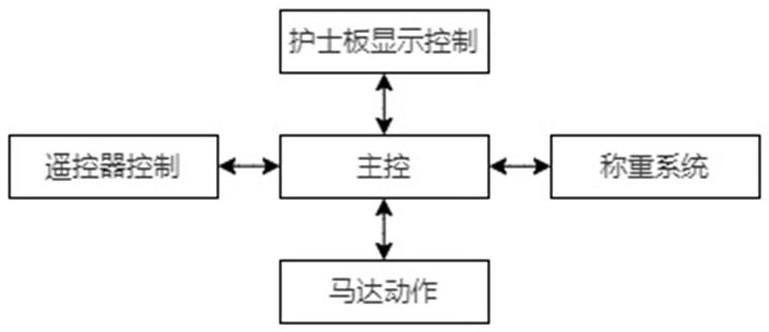
29.图1是本实用新型的使用框图。
30.图2是本实用新型的连接线示意图。
31.图3是本实用新型的单片机示意图。
具体实施方式
32.如图1-3,本实用新型包括主控模块;主控模块分别交互有护士板的显示模块、称重系统、手控器、安装在护栏上的护栏开关及设置在病床上的马达组;
33.手控器、护栏开关及护士板发送控制指令给485芯片,控制指令经过485芯片协议转换后将控制指令传送给控制盒的主控模块,主控模块对控制指令进行解析,然后主控模块输出执行指令,使得马达组和/或称重系统执行相应的动作。
34.显示模块显示称重数据、床板倾斜或摆动角度、马达控制参数、床体的重量;
35.马达组包括布置在病床上的若干马达,以完成病床的背部上升、背部下降、腿部上升、腿部下降、整床上升、整床下降、椅子位,体外冲击波位,电动cpr的动作;
36.护栏开关包括设置在病床上的若干按压锁键和对应的功能按键,可以将指定功能锁定,松开按键再次按压可以解锁指定功能。急停按键,停止正在进行的动作,将所有功能锁定,再次按压按键,解除急停模式。同时按交叉按键时,系统会停止动作。
37.系统具有断电记忆功能,意外断电,控制盒记忆马达的霍尔位置,功能锁的状态,再次上电可以不需要再次复位,继续使用。
38.系统具有蓄电池功能,意外断电时,自动切换到蓄电池供电,3分钟后系统进入休眠状态,护士板屏幕熄灭,护士板任意按键即可唤醒,唤醒后蜂鸣器响三声。所有功能可正常使用。
39.系统称重矫正功能
40.第一步:先点击称重显示按键进入称重界面,然后点击称重设置按键进入称重设置界面。第二步:通过点击称重清零按键进行切换要设置的功能。系统第一次设置或者设置后对床架结构又进行调整(磕碰等冲击行为),必须先进行角差矫正,即设定的load comer calibration 选项。第三步:进行校正时,每个传感器的位置必须按照1234正确顺序进行校正。若不知道传感器的顺序,则可通过选择load sensor data 选项,点击称重设置按键进入传感器数据检测模式,在此模式下,在任意位置传感器上放置砝码,此位置传感器的数值会明显大于其他传感器。第四步:选择load comer calibration 选项后,点击称重设置按键,进入角差矫正模式,此时界面会显示remove all items form bed,提示用户先把床面清空,确认清空后,点击称重设置按键,进入角差矫正界面,在此界面时,蓝色表示正在矫正的传感器,红色表示未矫正的传感器,绿色表示矫正完成的传感器,矫正时,必须按照顺序矫正。此时在传感器1位置放50kg以上的砝码,等数值显示稳定后,点击称重设置按键,若1号变成绿色则表示成功,若显示sensor one calibration failed,则表示不成功。需要重新矫正。其他传感器依次类推。当第四个传感器矫正完成时,四个角度传感器标号都会变绿,此时继续点击称重设置按键,进行角差总矫正,若成功则显示success,若失败,则显示fail。第五步:以上角差矫正完成后,继续进行总重量矫正。还是点击称重设置按键进入设置界面,此时选择load weight calibration 选项,点击称重设置按键进入总重量矫正模
式,此时界面会显示remove all items form bed,确认清空床面后,点击称重设置按键进入总重量矫正界面,此界面默认最小显示20kg。此时在床面中间位置放置一个已知重量的砝码,通过点击称重清零按键来调整此界面显示的重量(长按3s,此数值重新恢复到20kg),此数值为砝码实际重量(如:放置的砝码是50kg,则调整此界面数值为50kg),调整完成后,点击称重设置按键进行总重量校准,若成功则显示success,若失败则显示fail。
41.控制盒电路包括dc-dc模块、单片机ic8、蜂鸣器ha1、继电器控制模块、马达位置检测电路;单片机通过接收手控器信号来分析用户按键指令,通过pcb电路控制继电器控制模块,从而实现相应马达的动作来完成用户指令。单片机通过马达位置检测电路,读取马达位置,根据马达反馈的电平变化,判断马达所处位置。在pcb设计上增加大量保护电路,如二极管、tvs等,减少因外部故障导致的控制盒的损坏,单片机外围增加去耦电容,减少高频干扰,提高电路运行稳定性。
42.蜂鸣器ha1脚1接电源,脚2接三极管q1集电极,三极管q1发射极接地,三极管q1基极分别通过电阻r133接入单片机ic8端脚17且通过电阻r158接地;三极管q1用于控制蜂鸣器ha1负极的通断;
43.单片机ic8脚1分别外接接头j2及电源;脚6通过电容c80接地,脚4与脚1之间连接电容c78;脚4与脚5之间连接;脚7与脚8连接后分别外接电源及通过隔离电容c83接地;
44.单片机ic8具有hl3-a,rxd2,txd2,key1-3,ctr1,int1,data通道;
45.单片机ic8脚32分别通过c93及电阻r138接地,还通过电阻r136电连接有三极管q10的集电极;电源bat+通过二极管d43接三极管q10发射极,三极管q10发射极与基极之间电连接有电阻r127;
46.三极管q10的基极通过电阻r135接三极管q11的集电极,三极管q11的发射极接地,三极管q11基极一路通过电阻r140接地,一路通过电阻r137接单片机ic8脚33,以进行电池电量检测及电池过放保护。
47.护士板电路包括dc-dc模块、独立键盘、led指示灯、lcd屏幕组成。通过dc-dc模块进行电源转换,从而给led灯和lcd供电。用户通过按压独立键盘,单片机通过预设电路读取到相应键值,然后控制lcd屏幕显示出动作指令。护士板还通过485从主控获得角度的数据,并且通过一路ttl与称重系统通讯,可以实时获得称重数据并显示重量信息。
48.控制盒与手控器之间通过一根十三针防水直头尾端塑壳弹簧信号线相连,该连接线满足rohs2.0和cp65标准要求,电线及连接器符合ul认证。a向端连接控制盒,b向端连接手控器,连接器均有防误插设计。控制盒由连接线的第7脚和第14脚向手控器供电,控制盒与手控器通过连接线的第5脚和第10脚进行485通信。
49.本实用新型充分描述是为了更加清楚的公开,而对于现有技术就不再一一列举。
50.最后应说明的是:以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;作为本领域技术人员对本实用新型的多个技术方案进行组合是显而易见的。而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1