一种无级调节扶手机构的制作方法
1.本实用新型涉及医疗康复器械技术领域,尤其涉及一种无级调节扶手机构。
背景技术:
2.在手法治疗中会使用一种可调节多种体位的按摩床进行手法治疗,所以在手臂位置需要一种高度可调的扶手部件,现有的扶手大多为不可调节高度的,还有少数扶手虽然可以调节高度,但调节高度结构繁琐,操作不方便,而且扶手在高度调节时中连接杆有夹手的风险,大大影响其实用性。为此,提出一种无级调节扶手机构。
技术实现要素:
3.本实用新型为了解决扶手高度调节不便的问题,提供一种无级调节扶手机构,可任意调整扶手高度,操作轻便。
4.为实现上述目的,本实用新型所采用的技术方案是:
5.一种无级调节扶手机构,包括固定架、上连杆、下连杆、调高架以及扶手垫,所述固定架上、下方分别铰接有所述上连杆和下连杆,所述下连杆对称布设在上连杆两侧,所述上连杆下轮廓面置于下连杆上轮廓面以下;
6.所述调高架包括顶板以及对称布设在顶板下方两侧的侧板,所述顶板上方设置所述扶手垫,两侧所述侧板之间分别铰接有所述上连杆和下连杆,下连杆和侧板的铰接处还铰接有扇形自锁块,所述自锁块下端和侧板铰接;
7.两侧所述下连杆之间铰接有自锁楔件,所述自锁楔件和自锁块相互配合构成摩擦式棘轮机构,自锁楔件一端伸出侧板连接有手柄。
8.进一步地,所述固定架包括“c”字形架体、扶手转轴以及套设在扶手转轴上的旋转套,所述扶手转轴螺栓连接在架体上,所述旋转套下端截面呈梯形;
9.所述架体上螺栓连接有挡块,所述挡块抵在旋转套下端以限制旋转。
10.进一步地,所述上连杆铰接在旋转套中部,上连杆一端向上弯折铰接所述侧板;
11.所述下连杆铰接在旋转套两侧,下连杆一端向上弯折与侧板铰接后、向下弯折铰接所述自锁楔件。
12.进一步地,所述上连杆和下连杆均置于两侧侧板之间;
13.所述自锁块位于两侧下连杆之间,自锁块圆心位置和下连杆铰接,自锁块和下连杆的铰接点位置与下连杆和侧板的铰接点位置相同。
14.进一步地,所述自锁块的一侧面为自锁面一,所述自锁楔件的一侧面为自锁面二,所述自锁面二和自锁面一相互挤压以构成偏心楔块式棘轮机构。
15.通过上述技术方案,本实用新型的有益效果是:
16.本实用新型改进了支撑结构,固定架和调高架之间通过上连杆和下连杆连接,在上连杆和下连杆的作用下,可使得调高架相对于固定架上下移动,且在移动时,上连杆下轮廓面始终置于下连杆上轮廓面以下,可防止人体升入夹伤或有其它异物夹入。
17.本实用新型简化了锁紧机构、方便加工及安装,自锁楔件和自锁块相互配合构成摩擦式棘轮机构,具体为偏心楔块式棘轮机构,可适时调整扶手垫高度、且可停留在任意高度位置,实现无级调节,操作轻便快捷。
附图说明
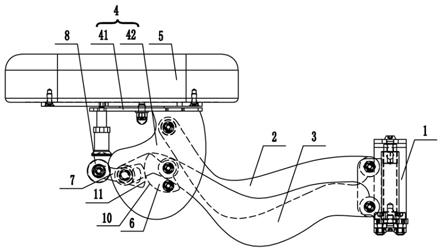
18.图1是本实用新型一种无级调节扶手机构的整体结构示意图。
19.图2是本实用新型一种无级调节扶手机构的固定架示意图。
20.图3是本实用新型一种无级调节扶手机构的爆炸视图。
21.图4是本实用新型一种无级调节扶手机构的主视图。
22.图5是本实用新型一种无级调节扶手机构的局部剖视图。
23.附图中标号为:1为固定架,101为架体,102为扶手转轴,103为旋转套,1031为轴部,1032为连接板部,1033为限位板部,2为上连杆,3为下连杆,4为调高架,41为顶板,42为侧板,5为扶手垫,6为自锁块,7为自锁楔件,8为手柄,9为挡块,10为自锁面一,11为自锁面二。
具体实施方式
24.下面结合附图对本实用新型的具体实施方式做详细描述:
25.如图1~图5所示,一种无级调节扶手机构,包括固定架1、上连杆2、下连杆3、调高架4以及扶手垫5,所述固定架1上、下方分别铰接有所述上连杆2和下连杆3,所述下连杆3对称布设在上连杆2两侧。
26.通过固定架1可将本机构和医疗康复器械安装,固定架1包括“c”字形架体101、扶手转轴102以及套设在扶手转轴102上的旋转套103,所述扶手转轴102为柱状、其两端通过螺栓连接在架体101上,扶手转轴102和架体101连接后截面呈“口”字形。
27.为了便于上连杆2和下连杆3的安装,所述旋转套103包括轴部1031、连接板部1032以及梯形限位板部1033,所述轴部1031套设在扶手转轴102上,轴部1031两侧设置所述连接板部1032。
28.上连杆2、下连杆3和固定架1安装时,所述上连杆2铰接在旋转套103中部,即铰接在两侧的连接板部1032之间,所述下连杆3铰接在旋转套103两侧,即两个下连杆3分别铰接在连接板部1032上,进而上连杆2和下连杆3可相对于固定架1转动。
29.为了防止旋转套103相对于架体101转动,所述轴部1031下端设置所述限位板部1033,所述架体101上螺栓连接有挡块9,所述挡块9截面呈梯形,挡块9抵在限位板部1033上,进而可以限制旋转套103旋转。
30.本实施例中,所述调高架4包括顶板41以及对称布设在顶板41下方两侧的侧板42,所述顶板41上方设置所述扶手垫5,两侧所述侧板42之间分别铰接有所述上连杆2和下连杆3,即上连杆2和下连杆3均置于两侧侧板42之间、且和侧板42铰接。
31.具体的,所述上连杆2一端向上弯折铰接所述侧板42、铰接点处于侧板42上方,所述下连杆3一端向上弯折与侧板42铰接、铰接点处于侧板42下方,进而上连杆2和下连杆3可相对于调高架4转动。
32.通过以上结构可实现调高架4相对于固定架1上下移动,进而扶手垫5可相对于固
定架1上下移动。
33.为了实现调高架4移动后的固定,所述下连杆3和侧板42的铰接处还铰接有扇形自锁块6,具体的,所述自锁块6位于两侧下连杆3之间,自锁块6圆心位置和下连杆3铰接,自锁块6和下连杆3的铰接点位置与下连杆3和侧板42的铰接点位置相同;
34.所述自锁块6下端和侧板42铰接,进而可实现调高架4移动时、自锁块6跟随移动且不产生转动。
35.本实施例中,两侧所述下连杆3之间铰接有自锁楔件7,具体的,下连杆3在向上弯折后、向下弯折铰接所述自锁楔件7,自锁楔件7可相对于下连杆3转动,所述自锁楔件7和自锁块6相互配合构成摩擦式棘轮机构;
36.通过自锁楔件7和自锁块6的配合可实现调高架4移动后位置的固定,即自锁楔件7和自锁块6之间自锁、可固定调高架4位置,自锁楔件7和自锁块6之间解锁、可调整调高架4位置。
37.为了便于控制自锁楔件7,所述自锁楔件7一端伸出侧板42连接有手柄8,通过手柄8可控制自锁楔件7的转动,进而可调整自锁楔件7和自锁块6之间的自锁、解锁状态。
38.本实施例中,所述自锁块6的一侧面为自锁面一10,所述自锁楔件7的一侧面为自锁面二11,所述自锁面二11和自锁面一10相互挤压以构成偏心楔块式棘轮机构。
39.偏心楔块式棘轮机构作为摩擦式棘轮机构中的一种,其工作原理与轮齿式棘轮机构相同,只是用偏心扇形楔块代替棘爪,用摩擦轮代替棘轮,利用楔块和摩擦轮间的摩擦力与楔块偏心的几何条件来实现摩擦轮的单向间歇转动。
40.根据摩擦式棘轮机构的原理,当扶手垫5相对固定架1向上运动时,自锁楔块相对自锁块6沿顺时针方向转动,此时自锁面一10和自锁面二11分开,自锁楔块与自锁块6所形成的摩擦式棘轮机构解锁,扶手垫5相对固定架1可以向上运动;
41.当扶手垫5具有相对固定架1向下运动的趋势时,自锁楔块相对自锁块6沿逆时针方向转动,此时自锁面一10和自锁面二11接触并挤压,自锁楔块与自锁块6所形成的摩擦式棘轮机构锁紧,扶手垫5相对固定架1锁定。
42.当扶手垫5需要相对固定架1向下运动时,只需用手轻抬自锁楔块的左侧,即向上轻抬手柄8使自锁楔块相对自锁块6沿逆时针方向转动,自锁楔块与自锁块6所形成摩擦式棘轮机构解锁,即可实现扶手垫5向下调整。
43.在扶手垫5相对固定架1上下运动中,所述上连杆2下轮廓面置于、且始终置于下连杆3上轮廓面以下,使得在扶手垫5相对固定架1上下运动时,上连杆2和两个下连杆3之间在平行于水平面的方向上没有间隙,从而防止人体升入夹伤或有其它异物夹入。
44.以上所述之实施例,只是本实用新型的较佳实施例而已,并非限制本实用新型的实施范围,故凡依本实用新型专利范围所述的构造、特征及原理所做的等效变化或修饰,均应包括于本实用新型申请专利范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1