微创手术机器人用隔离结构及微创手术机器人的制作方法
1.本实用新型涉及微创手术机器人领域,具体为一种微创手术机器人用隔离结构及微创手术机器人。
背景技术:
2.微创手术是指利用腹腔镜、胸腔镜等现代医疗器械及相关设备在人体腔体内部施行手术的一种手术方式。相比传统手术方式微创手术具有创伤小、疼痛轻、恢复快等优势。
3.随着科技的进步,微创手术机器人技术逐渐成熟,并被广泛应用。微创手术机器人通常包括主操作台及从操作设备,主操作台用于根据医生的操作向从操作设备发送控制命令,以控制从操作设备,从操作设备用于响应主操作台发送的控制命令,并进行相应的手术操作。手术器械与从操作设备的驱动装置连接,用于执行外科手术,故手术器械需要进行无菌处理,多自由度手术器械需要电机驱动,而多电机驱动部分安装在机械臂上,无法进行消毒灭菌操作,而手术需要无菌环境。
技术实现要素:
4.针对现有技术的不足,本实用新型提供了一种微创手术机器人用隔离结构,实现将手术器械无菌环境与手术器械有菌环境隔离,同时实现将运动由电机传递给手术器械,解决了机器人辅助微创手术中无菌环境与有菌环境的隔离问题。
5.为实现以上目的,本实用新型通过以下技术方案予以实现:一种微创手术机器人用隔离结构,其中:包括第一隔离板、第二隔离板、固定板、无菌袋和传动件,所述第一隔离板通过固定件连接于所述第二隔离板,所述第二隔离板与所述第一隔离板之间安装有所述固定板,所述无菌袋固定于所述固定板的边缘,所述传动件依次穿过所述第二隔离板、所述固定板和所述第一隔离板以将动力源的驱动力传递给器械盒。
6.优选地,上述的微创手术机器人用隔离结构,其中:所述固定件包括设置于所述第二隔离板上表面的定位柱,所述定位柱穿过所述固定板与所述第一隔离板上开设的定位孔连接。
7.优选地,上述的微创手术机器人用隔离结构,其中:所述定位柱与所述定位孔之间采用焊接或粘接方式形成固定连接。
8.优选地,上述的微创手术机器人用隔离结构,其中:所述传动件包括下端部、上端部和位于二者之间且侧面凸出二者的凸条,所述下端部与所述动力源连接,所述上端部与所述器械盒连接。
9.优选地,上述的微创手术机器人用隔离结构,其中:所述上端部的侧面设置有至少两个凸起,所述凸起位于同一水平面上且沿着所述传动件的周向均匀分布。
10.优选地,上述的微创手术机器人用隔离结构,其中:所述传动件位于所述第一隔离板的第一通孔和所述第二隔离板的第二通孔内,所述凸条位于所述第二通孔的下方,所述第二通孔的侧面开设有供所述凸起通过的缺槽。
11.优选地,上述的微创手术机器人用隔离结构,其中:所述第一隔离板的通孔侧面设置有与所述凸起对应的凸台,所述凸起与所述凸台在竖直方向的投影至少部分重合。
12.优选地,上述的微创手术机器人用隔离结构,其中:所述第一隔离板和所述第二隔离板之间还设有柱销,所述柱销位于所述第一隔离板的插孔和所述第二隔离板的第三通孔内,所述柱销侧面的凸环位于所述插孔和所述第三通孔之间。
13.优选地,上述的微创手术机器人用隔离结构,其中:所述第二隔离板的两侧均一体成型有卡扣。
14.一种微创手术机器人,其中:包括所述的微创手术机器人用隔离结构。
15.本实用新型具备以下有益效果:该微创手术机器人用隔离结构,通过第二隔离板和第一隔离板配合,使得传动件能够在第一隔离板和第二隔离板上正常运动而不至于脱落,将运动从电机输出端传递给手术器械接口部分,实现了对无菌环境和有菌环境的隔离。
附图说明
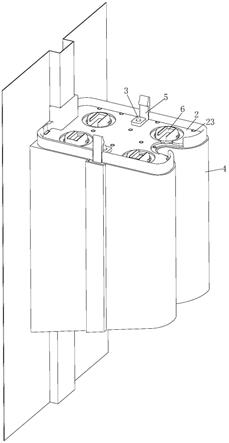
16.图1为本实用新型结构示意图;
17.图2为本实用新型传动件示意图;
18.图3为本实用新型的整体组装示意图;
19.图4为本实用新型上隔离板和下隔离板的组装示意图。
20.图中:1、第二隔离板;11、缺槽;12、定位柱;13、第二通孔;14、第三通孔;2、第一隔离板;21、第一通孔;22、插孔;23、定位孔;24、凸台;3、柱销;31、凸环;4、无菌袋;5、卡扣;6、传动件;61、凸条;62、凸起;7、固定板
具体实施方式
21.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
22.请参阅图1-4,本实用新型提供一种技术方案:一种微创手术机器人用隔离结构,包括第一隔离板2、第二隔离板1、固定板7、无菌袋4和传动件6,第一隔离板2通过固定件连接于第二隔离板1,第二隔离板1与第一隔离板2之间安装有固定板7,无菌袋4固定于固定板7的边缘,图中无菌袋4只是示例,实际并非图示的形状,就是一层粘贴在固定板7上的薄膜,当然在固定板7的内部部分是没有薄膜的,传动件6依次穿过第二隔离板1、固定板7和第一隔离板2以将动力源的驱动力传递给器械盒。
23.固定件包括设置于第二隔离板1上表面的定位柱12,定位柱12穿过固定板7与第一隔离板2上开设的定位孔23连接。定位柱12和定位孔23沿着两个隔离板的平面设置有多个,保证了两个隔离板连接的可靠性。
24.定位柱12与定位孔23之间采用焊接或粘接方式形成固定连接,定位柱12与定位孔23之间采用焊接或粘接,使得连接更加牢固。由于本实施方式中,无菌袋和两个隔离板等是作为一个整体使用的,因此可将定位柱12和定位孔23采用以上方式固定。如果需要面临更换不同的无菌袋时,可以将定位柱12和定位孔23设置为可插拔固定。
25.传动件6包括下端部、上端部和位于二者之间且侧面凸出二者的凸条61,下端部与动力源连接,上端部与器械盒连接。具体的,在本实施方式中,下端部是类似于立方体的形状,将下端部插入驱动机构的凹槽内从而接收动力,而上端部内具有类似于立方体的两面具有开口的凹槽,其内插有器械盒的传动支脚,从而将动力传递给器械盒,完成对手术器械的相应姿态控制。
26.上端部的侧面设置有至少两个凸起62,凸起62位于同一水平面上且沿着传动件6的周向均匀分布。为了注塑方便,凸起62与凸条61是相匹配的,即凸条61具有两个跟凸起62对应的缺口,相当于凸条61的一部分变为了凸起62,并且挪到了凸起62现在所在的位置上。在此,凸起62与凸条61为具有相同厚度的圆环状的立体结构。
27.传动件6位于第一隔离板2的第一通孔21和第二隔离板1的第二通孔13内,凸条61位于第二通孔13的下方,第二通孔13的侧面开设有供凸起62通过的缺槽11。凸台61的外径比第二通孔13的内径大,因此,凸条61能够在第二通孔13的位置处卡住使传动件6,从而限制传动件6向上运动的自由度。
28.第一隔离板2的通孔侧面设置有与凸起62对应的凸台24,凸起62与凸台24在竖直方向的投影至少部分重合。凸台24的设置是为了给凸起62提供支撑,从而限制传动件6向下运动的自由度。具体的,传动件6先以凸起62对准缺槽11的姿态先穿过第二通孔13,待凸起62完全高于缺槽11时,稍微转动传动件6;继续向上穿过第一通孔21,待凸起62完全高于凸台24时,接着向相反的反向转动传动件6,使得凸起62位于凸台24上。如此,就将传动件6和第一隔离板2和第二隔离板1的竖直方向的位置基本固定住了,便于本隔离结构产品的存储、运输和使用。
29.第一隔离板2和第二隔离板1之间还设有柱销3,柱销3位于第一隔离板2的插孔22和第二隔离板1的第三通孔14内,柱销3侧面的凸环31位于插孔22和第三通孔14之间。柱销3的设置便于第一隔离板2和第二隔离板1的定位,以方便数量众多的定位柱1插入定位孔23中。
30.第二隔离板1的两侧均一体成型有卡扣5,用于方便与下端的驱动机构和上端的器械盒部分的对接卡合。
31.本实用新型还提供一种微创手术机器人,包括上述的微创手术机器人用隔离结构。
32.组装时,先将无菌袋4固定于固定板7上形成无菌袋组件,接着将两个柱销3插入第二隔离板1的第三通孔14,四个传动件6从下往上穿过第二隔离板1上的第第二通孔13,且使得凸起62穿过缺槽11,以保证其正确安装;然后将无菌袋组件架设在第二隔离板1上,使得固定板7上的孔与定位柱12插接;最后将第一隔离板2架设在无菌袋组件上,且确保第二隔离板1上的定位柱12穿过定位孔23与第一隔离板2粘接或焊接,即完成组装。
33.该微创手术机器人用隔离结构,通过第二隔离板1和第一隔离板2配合,使得传动件6能够在第一隔离板2和第二隔离板1上正常运动而不至于脱落,将运动从电机输出端传递给手术器械接口部分,实现了对无菌环境和有菌环境的隔离。
34.需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有
的要素。
35.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1