用于微创手术的患者操作台的制作方法
1.本实用新型涉及微创手术机器人技术领域,具体而言,涉及一种用于微创手术的患者操作台。
背景技术:
2.参考授权公告号为cn109091237b,名称为微创手术器械辅助系统的中国发明专利以及授权公告号为cn109091238b、名称为分体式微创手术器械辅助系统的中国发明专利,微创手术器械操控系统被设计为在内窥镜下,由医生在手术室内操作,控制手术器械做手术的设备系统。医生坐在医生操作台前,通过观看3d影像显示器,操作医生机械臂,医生可如同平常手术般,利用患者机械臂精准的控制手术器械执行各种手术动作。
3.为适应手术室内紧凑空间的实际情况,以及微创手术切口位置的不确定性,与患者机械臂连接的患者操作台被动装置大多采用串联关节结构,以实现患者机械臂不动点空间位置的大范围调整。由于结构缺陷,目前的患者操作台被动装置普遍存在结构强度不足,锁紧间隙较大;机械臂调整不灵活,运动范围受限的缺点,为适应现代化微创手术的需要,需对患者机械臂的安装平台结构进行优化,以克服上述缺点。
技术实现要素:
4.本实用新型为了解决现有微创手术机器人的患者操作台的被动装置结构强度不足,锁紧间隙较大;机械臂调整不灵活,运动范围受限的技术问题,提供了一种被动调整装置强度高,锁紧间隙小;机械臂调整灵活,运动范围大的用于微创手术的患者操作台。
5.本实用新型提供的用于微创手术的患者操作台,包括远端被动调整装置、近端被动调整装置和机械臂,远端被动调整装置包括底座、升降立柱、大自转、横梁,升降立柱与底座连接,横梁通过大自转与升降立柱连接;横梁包括横梁固定端及横梁滑动端,横梁固定端与大自转相连并可随大自转转动,横梁滑动端通过直线模组与横梁固定端连接;
6.近端被动调整装置包括小自转、末端升降装置、左侧器械被动臂和图像被动臂,小自转与横梁滑动端连接,末端升降装置与小自转连接;末端升降装置包括升降支架,升降支架连接有左侧升降装置、中间升降装置;左侧器械被动臂与左侧升降装置连接,图像被动臂与中间升降装置连接;机械臂包括左侧器械主动臂、图像主动臂,左侧器械主动臂与左侧器械被动臂相连,图像主动臂与图像被动臂相连;左侧器械主动臂相对于左侧器械被动臂倾斜布置,图像主动臂相对于图像被动臂倾斜布置。
7.优选地,用于微创手术的患者操作台还包括右侧器械被动臂,末端升降装置还包括右侧升降装置,右侧器械被动臂与右侧升降装置连接,右侧器械主动臂与右侧器械被动臂连接。
8.本实用新型的有益效果是:被动调整装置强度高,锁紧间隙小。器械机械臂调整灵活,运动范围大。
9.本实用新型进一步的特征,将在以下具体实施方式的描述中,得以清楚地记载。
附图说明
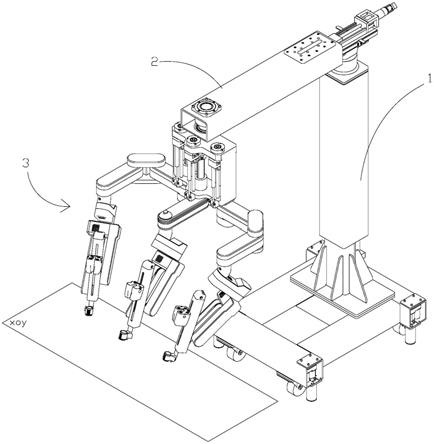
10.图1是用于微创手术的患者操作台的整体结构示意图;
11.图2是图1所示用于微创手术的患者操作台的分解图;
12.图3是支撑柱的结构示意图;
13.图4是末端升降装置的结构示意图;
14.图5是图4所示末端升降装置中的左侧升降装置的结构示意图;
15.图6是图像被动臂的整体结构示意图;
16.图7是患者操作台进行手术操作时的状态示意图;
17.图8是小自转及其制动装置的结构示意图;
18.图9是图8所示结构的分解图;
19.图10是小自转的剖视图;
20.图11是制动组件的结构示意图;
21.图12是图11所示制动组件的爆炸图;
22.图13是左侧器械主动臂的结构示意图;
23.图14是左侧器械主动臂的支撑臂的结构示意图;
24.图15是左侧器械主动臂的l型杆、第一连杆、第二连杆折叠状态下的结构示意图;
25.图16是器械升降座的结构示意图;
26.图17是器械升降座中,主动齿轮与从动齿轮啮合的结构示意图;
27.图18是左侧器械主动臂的l型杆、第一连杆、第二连杆折叠状态下的结构示意图。
28.图中符号说明:
29.1.远端被动调整装置,1.1.底座,1.2.升降立柱,1.3.大自转,1.4.横梁;2.近端被动调整装置,3.机械臂,
具体实施方式
30.以下参照附图,以具体实施例对本实用新型作进一步详细说明。
31.如如图1及图2所示,为适应手术室内紧凑环境的现实情况,患者操作台整体采用悬吊式布局,其整体结构主要由远端被动调整装置1、近端被动调整装置2及机械臂3三部分组成。机械臂3与近端被动调整装置2相连,并位于手术区域上方,手术前使用者可以根据病人手术部位的不同而在局部范围内灵活调整机械臂位置。为降低手术区域的污染风险及便于医生安装无菌套袋、手术器械,远端被动调整装置与近端被动调整装置间隔距离较远,并可在使用者的操作下实现机械臂在大范围空间内的位置调整与锁定。手术前,通过对远端被动调整装置1、近端被动调整装置2的设置,可以顺利实现患者机械臂不同点空间位置的确定。
32.远端被动调整装置1由一系列移动及转动关节串联组成,其整体结构包括底座1.1、升降立柱1.2、大自转1.3、横梁1.4。底座1.1可以实现患者操作台整体的移动及位置锁定。升降立柱1.2包括支撑柱1.2.1及移动筒1.2.2,其中支撑柱1.2.1与底座1.1通过紧固件固定安装,并可随底座一起移动。支撑柱1.2.1的结构如图3所示,主要由立柱焊件1.2.1.1、直线模组1.2.1.2及升降电机1.2.1.3三部分组成,立柱焊件1.2.1.1通过紧固件与直线模组1.2.1.2及底座固定相连,升降电机1.2.1.3与直线模组1.2.1.2的丝杠相连,并可驱动直
线模组的滑块沿轴线一1-1的方向往复移动。移动筒1.2.2通过紧固件与直线模组的滑块相连,并可在升降电机的带动下随直线模组的滑块一起沿轴线一1-1往复移动,进而实现患者操作台机械臂3及近端被动调整装置2整体高度的调整。
33.大自转1.3通过紧固件与横梁1.4相连,大自转1.3与移动筒1.2.2顶端连接并可手动实现绕轴线一1-1的转动及锁紧,其结构具有锁紧力矩大、间隙小的优点,可以有效保证机械臂手术过程中的位置精度。大自转1.3是关节作用。
34.横梁1.4包括横梁固定端1.4.1及横梁滑动端1.4.2,其中横梁固定端1.4.1与大自转1.3固定相连,并可随大自转一起绕轴线一1-1转动。横梁固定端1.4.1主要由横梁焊件1.4.1.1、直线模组1.4.1.2及横梁移动电机1.4.1.3三部分组成,横梁焊件1.4.1.1通过紧固件与直线模组及大自转3固定相连,横梁移动电机1.4.1.3与直线模组1.4.1.2的丝杠相连并可驱动直线模组1.4.1.2的滑块沿轴线2-1的方向往复移动。横梁滑动端1.4.2通过紧固件与直线模组1.4.1.2的滑块相连,并可在横梁移动电机1.4.1.3的带动下随直线模组滑块一起沿轴线2-1往复移动,进而实现患者操作台机械臂及近端被动调整装置水平方向的尺寸调整。
35.由底座1.1、升降立柱1.2、大自转1.3、横梁1.4构成的远端被动调整装置具有结构强度高,调整灵活、范围大的优点。其不仅可以在手术室内实现机械臂及近端被动调整装置大范围的移动,还可以通过调整各关节位置,使设备的体积最小化,重心降至最低以便于设备运输稳定。
36.近端被动调整装置2同样由一系列移动及转动关节组成,其整体结构包括小自转1.5、末端升降装置1.6、左侧器械被动臂1.7、右侧器械被动臂1.8及图像被动臂1.9,其中小自转1.5通过紧固件与横梁滑动端1.4.2固定连接,末端升降装置1.6与小自转1.5连接,小自转1.5可随横梁滑动端1.4.2一起沿轴线2-1方向往复移动。近端被动调整装置2整体可绕轴线三3-1在限定角度范围内转动并通过小自转1.5锁定。
37.末端升降装置1.6由三组相互独立的具有重力平衡功能的升降装置并联构成,分别是左侧升降装置1.6.1、右侧器械被动臂1.8、中间升降装置1.6.3,其中左侧器械被动臂1.7与左侧升降装置1.6.1的花键轴固定连接,右侧器械被动臂1.8与右侧升降装置1.6.2的花键轴固定连接,图像被动臂1.9与中间升降装置1.6.3的花键轴固定连接,以实现机械臂相互独立的垂直于xoy平面的升降运动,进而在高度方向对不动点位置进行调整。左侧升降装置1.6.1、右侧器械被动臂1.8和中间升降装置1.6.3这三组升降装置的结构相同,每组升降装置的具体结构如图5所示,抱闸1.6.12通过紧固件与升降支架1.6.4固定安装;花键1.6.5包括花键轴1.6.5.1及花键座1.6.5.2,花键座1.6.5.2通过紧固件与升降支架1.6.4固定安装,花键轴1.6.5.1可沿轴线四3-2往复移动;滚珠丝杠1.6.7包括丝杠螺母1.6.7.1及丝杠杆1.6.7.2,丝杠杆1.6.7.2通过角接触球轴承1.6.9及轴承压盖1.6.10与升降支架1.6.4安装,并通过抱闸块1.6.11与抱闸连接,以实现转动及制动功能。丝杠螺母1.6.7.1通过连接座1.6.6与花键轴1.6.5.1连接,并可随花键轴的移动实现丝杠螺母在丝杠杆上的移动,进而实现丝杆杆的转动。连接座1.6.6另一端安装有气弹簧1.6.8,对升降装置进行重力平衡,气弹簧1.6.8的输出端与升降支架1.6.4连接。
38.左侧器械被动臂1.7和右侧器械被动臂1.8采用现有技术中的常规结构即可,比如可以采用专利号为201922030990.4、名称为一种平移机械臂的实用新型专利所公开的结
构。
39.左侧器械主动臂1.10及右侧器械主动臂1.12分别与左侧器械被动臂1.7及右侧器械被动臂1.8与相连,以实现器械主动臂相互独立的平行于xoy平面的平移运动,进而在水平方向对其不动点位置进行调整。
40.图像被动臂1.9位于左侧器械被动臂及右侧器械被动臂中间位置,并与图像主动臂1.11相连。为适应微创手术操作区域的狭小空间,以及尽量避免机械臂在手术过程中相互碰撞,图像被动臂1.9与中间升降装置1.6.3的花键轴固定安装,仅能实现垂直于xoy平面的升降运动,而不能实现平行于xoy平面的平移运动。图像被动臂1.9的整体结构如图6所示,连杆1.9.1与连接座1.9.2通过紧固件安装至一起,连接座1.9.2与图像主动臂1.11连接,连杆1.9.1的端部与中间升降装置的花键轴1.6.5.1相连,连杆1.9.1上部及侧面安装有方向开关1.9.3及按钮开关1.9.4,其中按钮开关可以同时控制大自转1.3、1.6.3中间升降装置的抱闸及1.5小自转关节的电动推杆,以实现大自转关节绕轴线一1-1、图像被动臂沿轴线四3-2及小自转关节绕轴线三3-1的运动与锁紧。方向开关则通过控制横梁移动电机1.4.1.3的正反转实现横梁滑动端1.4.2沿轴线2-1的往复运动。
41.图像主动臂1.11整体倾斜布置,与图像被动臂1.9之间存在小于90
°
的夹角。相应地,左侧器械主动臂1.10也倾斜布置,左侧器械主动臂1.10与左侧器械被动臂1.7所在平面之间存在小于90
°
的夹角。相应地,右侧器械主动臂1.12也倾斜布置,右侧器械主动臂1.12与右侧器械被动臂1.8所在平面存在小于90
°
的夹角。
42.在实际使用过程中,为避免误碰,操作者需同时控制按钮开关1.9.4及方向开关1.9.3,并辅助手动操作,先将图像主动臂1.11的不动点位置与患者切口部位重合,然后再通过手动调整左侧升降装置1.6.1、右侧升降装置1.6.2、左侧器械被动臂1.7、右侧器械被动臂1.8以将左侧器械主动臂1.10的不动点位置及右侧器械主动臂1.12的不动点位置与患者其他切口部位重合,进而快速有效的实现机械臂的空间定位。
43.如图7所示,是患者操作台进行手术操作时的状态示意图。在手术开始前,通过对远端被动调整装置1及近端被动调整装置2的手动操作,使分别附接在左侧器械主动臂1.10、图像主动臂1.11及右侧器械主动臂1.12的穿刺器与患者切口部位重合,以实现各机械臂不动点空间位置的确定。在实际手术过程中,左/右器械主动臂与图像主动臂间自然呈一定的夹角α及γ,以满足医生操控机械臂对患者进行微创手术操作的需求。因此手术开始前,操作者还需调整机械臂各关节的相对位置,确定机械臂的初始姿态,以使穿刺器刺入病人手术切口的方向处于合理角度,便于医生操作。
44.由于机械臂本身结构限制,各关节的转动角度只能限定在一定范围,为满足手术过程中手术器械相对患者手术切口位置(不动点位置)的运动空间需求,操作者调整机械臂初始姿态时,各关节的锁定位置应尽可能处于其转动范围的中间位置。为尽可能满足这一需求,在图像主动臂与图像被动臂间设置夹角θ,使图像主动臂不动点位置抬高并前伸,左/右器械主动臂与被动臂间同样设置夹角θ及β,使器械主动臂不动点位置抬高、前伸,并靠近图像主动臂的不动点。通过这种设计,当机械臂各关节处于转动范围的中间位置时,各机械臂的姿态及相互位置基本满足操作者的需求,以减少关节调整量,进而达到扩大机械臂相对患者手术切口位置运动范围的目的。
45.如图8-12所示,小自转1.5通过四个螺钉5安装在横梁滑动端1.4.2横梁滑动端
1.4.2上;制动组件3通过螺钉安装在横梁滑动端1.4.2上,电动推杆组件4通过螺钉7安装在横梁滑动端1.4.2横梁滑动端1.4.2上。小自转1.5包括支撑座8、转轴9、轴承垫片10、锁紧螺母11、轴承压盖12、深沟球轴承14以及成对安装的两个圆锥滚子轴承13。支撑座8通过螺钉5与横梁滑动端1.4.2固定连接。深沟球轴承14与转轴9的下部连接,深沟球轴承14的外圈与横梁滑动端1.4.2配合。两个圆锥滚子轴承13套在转轴9的上部,轴承垫片10套在转轴9的上部,轴承垫片10位于两个圆锥滚子轴承13之间,圆锥滚子轴承13的外圈与支撑座8的内壁配合。轴承压盖12通过螺钉与支撑座8的顶部固定连接,轴承压盖12的下端下压圆锥滚子轴承13的外圈。锁紧螺母11与转轴9的上端连接。通过轴承压盖12及轴承垫片10对安装在其内部的圆锥滚子轴承外圈进行轴向定位。转轴9与圆锥滚子轴承13及深沟球轴承14内圈配合安装,并通过锁紧螺母11进行轴向定位。由此,当转轴组件安装在横梁滑动端1.4.2后,其内的转轴9可实现绕轴线的转动。制动组件3包括基座15、左制动片16、右制动片17、左侧推杆18、右侧推杆19及圆柱销20。左制动片16及右制动片17通过圆柱销与基座15固定连接。左侧推杆18通过圆柱销与左制动片16转动连接,右侧推杆19通过圆柱销20与右制动片17转动连接。左侧推杆18、右侧推杆19可分别绕轴线16-1、轴线17-1自由转动。左制动片16和右制动片17由弹性耐磨材料制成,受到外力后可以发生弹性变形,外力撤除,恢复原位。基座15上加工有螺纹孔,并通过螺钉6与横梁滑动端1.4.2安装至一起。左制动片16和右制动片17包围转轴9。电动推杆组件4包括左侧电动推杆21、右侧电动推杆22,左侧电动推杆21正对左侧推杆18,右侧电动推杆22正对右侧推杆19。将转轴9与升降支架1.6.4固定连接,当转轴9需要制动时,左侧电动推杆21及右侧电动推杆22同时伸出,推动制动组件3的左侧推杆18及右侧推杆19的后部,致使左制动片16、右制动片17发生弹性变形并抱紧转轴9,转轴9即被锁死(转轴9与两个制动片之间无相对运动)。由于电动推杆的伸缩行程很小,其完全伸出时间较短,因此可以在短时间内实现转轴的有效制动。当需解除制动时,控制左侧电动推杆21、右侧电动推杆22同时收回,左制动片16、右制动片17在自身弹性的作用下与转轴脱离,转轴9即可自由转动。
46.以左侧器械主动臂1.10为例,说明器械主动臂的一种具体实现结构:如图13-18所示,左侧器械主动臂1.10包括支撑臂a3、l型杆4、第一连杆5、第二连杆6、器械升降座7、快换装置8、戳卡9、穿刺器10。第一连杆5通过转动关节与l型杆4的下端连接,第二连杆6与通过转动关节与第一连杆5连接,器械升降座7通过转动关节与第二连杆6。器械升降座7上设有止动按钮7-11和指示灯7-12,此按钮可控制各关节处的电机抱闸,按下此按钮可手动移动各关节位置。指示灯7-12是可显示不同颜色的指示灯,操作者可通过不同颜色的指示灯,判断机械臂状态。支撑臂a3包括旋转基座a3-1、旋转驱动电机3-2、旋转轴3-3、第一锥齿轮3-4、第二锥齿轮3-5,旋转驱动电机3-2固定安装在旋转基座a3-1上,旋转轴3-3通过轴承与旋转基座a3-1转动连接,第一锥齿轮3-4与旋转轴3-3固定连接,第二锥齿轮3-5与旋转驱动电机3-2的输出轴固定连接,第二锥齿轮3-5与第一锥齿轮3-4啮合。旋转驱动电机3-2工作可驱动旋转轴3-3绕轴线一3-6方向旋转。l型杆4与旋转轴3-3固定连接。连杆驱动电机4-1固定在l型杆上,驱动轮4-2通过螺钉固定在驱动轮轴4-3上(驱动轮轴4-3与连杆驱动电机4-1的输出轴固定连接),钢丝4-4绕过驱动轮4-2和从动轮4-5,从动轮4-5通过紧定螺钉固定在关节的从动轮轴上,从动轮轴的另一端也固定有从动轮,使得连杆驱动电机4-1动作可带动第一连杆5绕轴线二4-6转动。第二连杆6和第一连杆5之间也通过上述钢丝绳传动机构连
接,第二连杆6能够绕轴线三5-3转动。器械升降座7与第二连杆6之间也通过上述钢丝绳传动机构连接,器械升降座7能够绕轴线四6-4转动。连杆驱动电机4-1动作通过传动机构使第一连杆5绕轴线二4-6转动,同时第二连杆6绕轴线三5-3转动,同时器械升降座7绕轴线四6-4转动,从而实现第一连杆5、第二连杆6和器械升降座7的伸展或折叠,传动机构可以采用专利号为201711314225.4的发明专利中附图17中的同步带传动机构。器械升降座7的结构,滑轨组件7-2通过螺钉安装在基座7-1上上,丝杠7-3两端通过轴承与基座7-1连接,丝杠螺母7-4与丝杠7-3连接,丝杠螺母7-4通过支撑架与滑轨组件7-2的滑块连接,器械升降座7底部固定安装有电机,电机的输出轴连接有主动齿轮7-5,从动齿轮7-6与丝杠7-3固定连接,主动齿轮7-5与从动齿轮7-6啮合,电机转动可带动丝杠转动,从而使沿着快换装置8的长度方向移动。快换装置8通过支架与器械升降座7的丝杆螺母7-4固定连接,快换装置用于安装手术器械,手术器械的器械杆穿过穿刺器10,戳卡9与器械升降座7连接,穿刺器10安装在戳卡9上。快换装置8采用专利号为201922031305.x的实用新型专利中公开的结构即可。此手术器械机械臂改变传统的全横向折叠式的设计,器械升降座7前置,器械升降座7位于第二连杆6的内侧,节省了横向空间,将快换关节相对独立于机械臂整体,使得术中更换手术器械时,更换者有更充足的空间进行操作,保证操作的便捷性,快速性。参考图15和16,当第一连杆5、第二连杆6和器械升降座7折叠起来时,l型杆4、第一连杆5、第二连杆6三者位于同一平面,器械升降座7不在该平面内,器械升降座7与该平面不平行而是存在一定的夹角。参考图13,当第一连杆5、第二连杆6和器械升降座7伸展时(向图13中右下角方向运动),第一连杆5相对于l型杆4顺时针方向转动,第二连杆6相对于第一连杆5逆时针方向转动,器械升降座7相对于第二连杆6顺时针方向转动。相反地,当第一连杆5、第二连杆6和器械升降座7折叠时,第一连杆5相对于l型杆4逆时针方向转动,第二连杆6相对于第一连杆5顺时针方向转动,器械升降座7相对于第二连杆6逆时针方向转动。
47.以上示意性的对本实用新型及其实施方式进行了描述,该描述没有限制性,附图中所示的也只是本实用新型的实施方式之一,实际的结构并不局限于此。所以,如果本领域的技术人员受其启示,在不脱离本实用新型创造宗旨的情况下,采用其它形式的零件构型、驱动装置以及连接方式不经创造性的设计与该技术方案相似的结构方式及实施例,均应属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1