用于检查用于成像辅助医学干预的激光导航系统的系统的制作方法
1.本实用新型涉及一种用于检查用于成像辅助医学干预的激光导航系统的系统。
背景技术:
2.在成像辅助医学干预的情况下,可以特别借助集成的激光引导(ilg:集成激光引导)来为医务人员提供支持。例如,在干预期间可能需要将针头以特定方向在特定位置插入患者体内。为避免并发症,必须提前仔细确定穿刺部位的位置和针路的方向,并在干预过程中进行保持。
3.de 102011004747 a1公开了一种用于识别空间中平面的装置,该装置具有发射扇区形光束的光源。
4.ep 3701869 a1公开了一种具有至少一个用于校准集成激光导引器的光电探测器的体模。
5.集成激光导引器的每个激光投影器都必须以干预所需的精度进行校准。为此可以使用校准体模。校准体模可以是例如具有多个光电二极管的光学校准装置,用于检测投射的激光束扇区。对于校准过程,校准体模例如借助插头连接可拆卸地连接到医学成像设备,例如ct设备。
6.这种校准很复杂,并且通常由技术服务人员进行。然而,就临床工作人员而言,存在能够检查集成激光导引器的校准情况的需求。这种检查可以特别是在集成激光导引器支撑后的初始校准之后、事故之后(例如ct台与病床碰撞)、或医学成像设备修改之后(例如更换ct设备中的x射线源)有重要意义。
技术实现要素:
7.本实用新型的目的是提供一种改进的系统,用于检查用于成像辅助医学干预的激光导航系统。
8.根据本实用新型,克服了现有技术中的校准过程复杂之类的技术问题,有助于实现以下优点:没有经验的用户可以简单准确地检查激光导航系统,而无需深入的技术了解。
9.本实用新型涉及一种用于检查用于成像辅助医学干预的激光导航系统的系统,
[0010]-其中第一目标区域、与第一目标区域间隔开的第二目标区域、第一参考平面、和与参考平面间隔开的第二参考平面相对于用于成像辅助医学干预的坐标系被定义,使得第一目标区域在第一参考平面中平面延伸,第二目标区域在第二参考平面中平面延伸,并且当第一校准路径与第一目标区域和第二目标区域相遇时,激光导航系统关于第一校准路径被以足够的精度设置,
[0011]-其中系统包括具有第一标记和与第一标记隔开的第二标记的标记装置,
[0012]-其中系统具有定位装置,所述定位装置用于将标记装置在相对于坐标系的第一位置中定位并且将标记装置在相对于坐标系的第二位置中定位,
[0013]-其中在标记装置相对于坐标系的第一位置中,第一标记标记第一目标区域,并且
当第一校准路径借助激光导航系统是可视化的、并与第一目标区域相遇时,第一校准路径与第一目标区域相遇的相遇点作为光点在第一标记上可见,以及
[0014]-其中在标记装置相对于坐标系的第二位置中,第二标记标记第二目标区域,并且当第一校准路径借助激光导航系统是可视化的、并与第二目标区域相遇时,第一校准路径与第二目标区域相遇的相遇点作为光点在第二标记上可见。
[0015]
用于成像辅助医学干预的坐标系可以例如是激光导航系统的坐标系。第一参考平面尤其可以平行于第二参考平面。
[0016]
第一校准路径尤其可以可视化为激光导航系统的两个激光束扇区之间的第一交线。
[0017]
第一标记上的光点尤其可以由可视化的第一校准路径在第一标记处散射的光组成。第二标记上的光点尤其可以由可视化的第一校准路径在第二标记上散射的光组成。
[0018]
标记装置例如可以设计为体模,尤其是被动体模。特别地,标记装置不必具有例如用于基于激光辐射产生电信号的光电转换器。
[0019]
标记装置的定位和一组校准路径均以软件和/或书面文档的形式在文档中定义,其可以与标记装置一起被提供。
[0020]
通过这种方式,可以由尤其是没有经验的用户检查激光导航系统,无需深入的技术了解。可以省去使用长度量器的手动测量。
[0021]
一个实施例提出,第一标记具有第一目标区域,其中第一目标范围与第一目标区域一致,并且第二标记具有第二目标范围,其中第二目标范围与第二目标区域一致。特别地可以提出,第一目标区域与第二目标区域一致。
[0022]
特别地可以提出,当第一校准路径借助激光导航系统是可视化的、并与第一目标区域相遇时,第一校准路径与第一目标区域相遇的相遇点作为光点在第一目标范围上可见,和/或当第一校准路径借助激光导航系统是可视化的、并与第二目标区域相遇时,第一校准路径与第二目标区域相遇的相遇点作为光点在第二目标范围上可见。
[0023]
一个实施例提出,第一标记具有标记第一目标范围的边缘的第一边缘标记,并且第二标记具有标记第二目标范围的边缘的第二边缘标记。
[0024]
特别地可以提出,在标记装置相对于坐标系的第一位置中,第一目标区域的边缘被第一边缘标记标记,和/或在标记装置相对于坐标系的第二位置中,第二目标区域的边缘被第二边缘标记标记。
[0025]
一个实施例提出,第一目标范围的边缘是椭圆形的,并且第二目标范围的边缘是椭圆形的。一个实施例提出,第一目标范围的边缘是圆形的,并且第二目标范围的边缘是圆形的。
[0026]
尤其可以提出,第一边缘标记是椭圆形或圆形的。尤其可以提出,第二边缘标记是椭圆形或圆形的。
[0027]
一个实施例提出,第一标记具有标记第一目标范围的部分范围的边缘的第一部分范围边缘标记,其中第一目标范围的部分范围的边缘与第一目标范围的边缘同心,并且第二标记具有标记第二目标范围的部分范围的边缘的第二部分范围边缘标记,其中第二目标范围的部分范围的边缘与第二目标范围的边缘同心。
[0028]
尤其可以提出,第一部分范围边缘标记与第一边缘标记同心,和/或第二部分范围
边缘标记与第二边缘标记同心。
[0029]
例如可以提出,当第一标记上的光点位于第一目标范围的部分范围上时,并且当第二标记上的光点位于第二目标范围的部分范围上时,激光导航系统满足关于第一校准路径的校准精度的更高要求。
[0030]
一个实施例提出,标记装置具有平坦外表面,第一目标范围在平坦外表面中平面延伸,并且第二目标范围在平坦外表面中平面延伸。例如,标记装置可以基本上设计成板形的。
[0031]
尤其可以提出,第一目标范围被设计为在平坦外表面上的第一平面几何图形,和/或第二目标范围被设计为在平坦外表面上的第二平面几何图形。特别地,第一平面几何图形和/或第二平面几何图形可以是凸面的。
[0032]
例如,第一边缘标记可以被压印和/或胶合到标记装置的平坦外表面上。第一边缘标记可以被设计为例如相对于标记装置的平坦外表面的至少一个凹陷的形式和/或至少一个隆起的形式,或者位于平坦外表面中。例如,第二边缘标记被压印和/或粘合到标记装置的平坦外表面上。第二边缘标记可以被设计为例如相对于标记装置的平坦外表面的至少一个凹陷的形式和/或至少一个隆起的形式,或者位于平坦外表面中。
[0033]
一个实施例提出,在标记装置相对于坐标系的第一位置中,平坦外表面在第一参考平面中平面延伸,并且在标记装置相对于坐标系的第二位置中,平坦外表面在第二参考平面中平面延伸。
[0034]
一个实施例提出,第一参考平面是水平的和/或平行于第二参考平面。
[0035]
一个实施例提出,定位装置被设计成使标记装置从标记装置相对于坐标系的第一位置直至标记装置相对于坐标系的第二位置直线运动,特别是通过平移沿着一个垂直于第一参考平面的运动方向运动。
[0036]
一个实施例提出,第一目标区域和第二目标区域是基于第一圆柱体定义的,第一校准路径的额定走势位于所述第一圆柱体的圆柱轴线上,第一目标区域是第一圆柱体和第一参考平面的相交面,第二目标区域是第一圆柱体和第二参考平面的相交面。
[0037]
例如,圆柱体可以是圆柱体。作为圆柱体的替代品,可以使用圆锥体。
[0038]
例如,可以通过关于激光导航系统的校准路径的额定走势的一个部段预先规定第一校准路径和第一校准路径的期望路线之间的最大距离,由此来表述对激光导航系统的设置精度的要求。
[0039]
例如,可以预先规定在100毫米的长度上不得超过5毫米的最大距离。在这种情况下,第一校准路径必须延伸穿过第一圆柱体的位于第一参考平面和第二参考平面之间的部段,而不与其外表面相交,其中第一圆柱体的半径等于五毫米,并且第一参考平面与第二参考平面之间的距离等于100毫米。
[0040]
一个实施例提出,第三目标区域和与第三目标区域间隔开的第四目标区域相对于用于成像辅助医学干预的坐标系被定义,使得第三目标区域在第一参考平面中平面延伸,第四目标区域在第二参考平面中平面延伸,并且当第二校准路径与第三目标区域和第四目标区域相遇时,激光导航系统关于第二校准路径被以足够的精度设置,
[0041]-其中标记装置具有第三标记和与第三标记间隔开的第四标记,
[0042]-其中在标记装置相对于坐标系的第一位置中,第三标记标记第三目标区域,并且
当第二校准路径借助激光导航系统是可视化的、并与第三目标区域相遇时,第二校准路径与第三目标区域相遇的相遇点作为光点在第三标记上可见,以及
[0043]-其中在标记装置相对于坐标系的第二位置中,第四标记标记第四目标区域,并且当第二校准路径借助激光导航系统是可视化的、并与第四目标区域相遇时,第二校准路径与第四目标区域相遇的相遇点作为光点在第四标记上可见,
[0044]-其中第一校准路径以锐角与第一参考平面和/或第二参考平面相交,
[0045]-其中第二校准路径以锐角与第一参考平面和/或第二参考平面相交,
[0046]-其中第一校准路径平面(ec1)垂直于第二校准路径平面(ec2),所述第一校准路径平面垂直于第一参考平面并具有第一校准路径,所述第二校准路径平面垂直于第一参考平面并具有第二校准路径。
[0047]
一个实施例提出,第五目标区域和与第五目标区域间隔开的第六目标区域相对于用于成像辅助医学干预的坐标系被定义,使得第五目标区域在第一参考平面中平面延伸,第六目标区域在第二参考平面中平面延伸,并且当第三校准路径与第五目标区域和第六目标区域相遇时,激光导航系统关于第三校准路径被以足够的精度设置,
[0048]-其中标记装置具有第五标记,
[0049]-其中在标记装置相对于坐标系的第一位置中,第五标记标记第五目标区域,并且当第三校准路径借助激光导航系统是可视化的、并与第五目标区域相遇时,第三校准路径与第五目标区域相遇的相遇点作为光点在第五标记上可见,以及
[0050]-其中在标记装置相对于坐标系的第二位置中,第五标记标记第六目标区域,并且当第三校准路径借助激光导航系统是可视化的、并与第六目标区域相遇时,第三校准路径与第六目标区域相遇的相遇点作为光点在第五标记上可见,
[0051]-其中第三校准路径垂直于第一参考平面和/或第二参考平面。
[0052]
一个实施例提出,该系统还具有医学成像设备,其中用于成像辅助医学干预的坐标系是激光导航系统和医学成像设备的共同坐标系。
[0053]
医学成像设备可以例如选自成像模态组,该组由以下设备构成:x射线设备、c臂x射线设备、计算机断层扫描设备(ct设备)、分子成像设备(mi设备)、单光子发射计算机断层扫描设备(spect设备)、正电子发射断层扫描设备(pet设备)、磁共振断层扫描设备(mr设备)及其组合,特别是pet-ct设备和pet-mr设备的组合。此外,医学成像设备可以具有例如从成像模态组中选择的成像模态和辐射模态的组合。辐照模态例如可以具有用于治疗辐照的辐照单元。
[0054]
在不限制一般实用新型构思的情况下,在一些实施例中,计算机断层摄影设备被命名为医学成像设备的示例。
[0055]
一种实施方式提出,医学成像设备具有患者支撑装置,并且患者支撑装置形成定位装置。
[0056]
本实用新型还涉及一种将根据所公开的方面之一的系统用于检查用于成像辅助医学干预的激光导航系统的应用。
附图说明
[0057]
下面借助实施例在参考附图的情况下阐述本实用新型。附图中的图示是示意的、
高度简化的并且不一定比例正确。
[0058]
在此:
[0059]
图1示出了用于成像辅助医学干预的激光导航系统,
[0060]
图2示出了标记装置,
[0061]
图3示出了在医学成像设备的机架前的标记装置,
[0062]
图4示出了在标记装置相对于坐标系的第一位置中的系统,
[0063]
图5示出了在标记装置相对于坐标系的第二位置中的系统,
[0064]
图6示出了标记装置相对于坐标系的第一位置,
[0065]
图7示出了标记装置相对于坐标系的第二位置,以及
[0066]
图8示出了用于检查用于成像辅助医学干预的激光导航系统的方法的流程图。
具体实施方式
[0067]
图1示出了用于成像辅助医学干预的激光导航系统l。激光导航系统l集成在医学成像设备2中,具有四个激光源a1、a2、a3和a4,它们布置在医学成像设备2的机架20上。
[0068]
四个激光源a1、a2、a3和a4中的每个都被设置为产生一个激光束扇区,其中相应激光束扇区的扇区平面的定向和相应激光束扇区的中心光束的取向可以彼此独立地设置。为此,四个激光源a1、a2、a3和a4中的每个具有例如各一个用于使相应激光束扇区的扇区平面旋转的电机和一个用于使特别是反射镜形式的光学系统旋转的电机,以设置相应激光束扇区的中心束的取向。
[0069]
用于干预的计划针路径尤其可以可视化为两个激光束扇区的交线c。针路径与患者13相遇的相遇点d作为患者13上的光点可见,由此针n要刺入患者13的穿刺点被可视化。针n必须沿着可视化的针路径对齐。
[0070]
激光导航系统l的哪两个激光源被用于使计划针路径可视化是取决于计划针路径的几何特性的。尤其可以基于医学成像检查的结果来规划针路径。医学成像检查尤其可以通过医学成像设备2进行。医学成像检查例如可以包括成像数据采集,特别是以计算机断层摄影扫描的形式,以及相应的图像重建。
[0071]
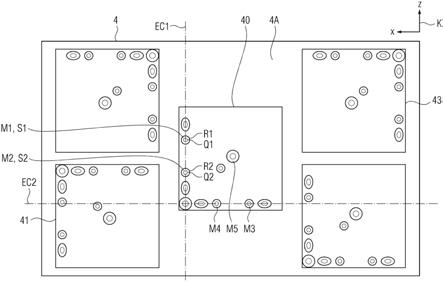
图2示出标记装置4。可用于检查激光导航系统l的目标范围的椭圆和圆形边缘标记被压印在标记装置4上。椭圆边缘标记被分配给以锐角与第一参考平面e1和第二参考平面e2相交的校准路径的目标范围。圆形边缘标记被分配给垂直于第一参考平面e1和第二参考平面e2的校准路径的目标范围。
[0072]
标记装置4具有多组目标范围40、41、43。标记装置4的尺寸和标记装置4上的目标范围的分布被选择为使得激光导航系统l的工作范围被充分覆盖。
[0073]
第一标记m1具有第一目标范围s1,其中第一目标范围s1与第一目标区域t1一致。第二标记m2具有第二目标范围s2,其中第二目标范围s2与第二目标区域t2一致。
[0074]
第一标记m1具有标记第一目标范围s1的边缘的第一边缘标记r1。第二标记m2具有标记第二目标范围s2的边缘的第二边缘标记r2。
[0075]
第一目标范围s1的边缘为椭圆形。第二目标范围s2的边缘为圆形。
[0076]
第一标记m1具有标记第一目标范围s1的部分范围的边缘的第一部分范围边缘标记q1,其中第一目标范围s1的部分范围的边缘与第一目标范围s1的边缘同心。第二标记m2
具有标记第二目标范围s2的部分范围的边缘的第二部分范围边缘标记q2,其中第二目标范围s2的部分范围的边缘与第二目标范围s2的边缘同心。
[0077]
标记装置4具有平坦的外表面4a、第一目标范围s1在平坦外表面4a中平面延伸,并且其中第二目标范围s2在平坦外表面4a中平面延伸。
[0078]
图3示出了在医学成像设备2的机架20前面的标记装置4。
[0079]
图4示出了在标记装置4相对于坐标系k的第一位置中用于检查用于成像辅助医学干预的激光导航系统l的系统1。系统1还具有医学成像设备2,用于成像辅助医学干预的坐标系k是激光导航系统l和医学成像设备2的共同坐标系。
[0080]
医学成像设备2具有机架20、隧道形开口9、患者支撑装置10和控制装置30。患者13可以被引入隧道形开口9。患者支撑装置10具有用于支撑患者13的支撑底座11和支撑板12。通过机架20和支撑板12的相对运动,患者13可以沿着系统轴线as被引入隧道形开口9中。
[0081]
支撑板12的高度可以通过支撑底座11来设置,特别是为了相对于系统轴线as垂直地定位患者13的待查验区域。标记装置4设置在支撑板12上并且可以借助支撑底座11沿坐标系k的y轴定位。第一参考平面e1和第二参考平面e2均平行于坐标系k的x-z平面。
[0082]
患者支撑装置10形成定位装置5。定位装置5被设计成使标记装置4从标记装置4相对于坐标系k的第一位置直至标记装置4相对于坐标系k的第二位置直线运动。
[0083]
第一参考平面e1是水平的,且平行于第二参考平面e2。在标记装置4相对于坐标系k的第一位置中,平坦外表面4a在第一参考平面e1中平面延伸。在标记装置4相对于坐标系k的第二位置中,平坦外表面4a在第二参考平面e2中平面延伸。
[0084]
控制装置30被设计成既控制医学成像设备2又控制激光导航系统l。
[0085]
图5示出了在标记装置4相对于坐标系k的第一位置中用于检查用于成像辅助医学干预的激光导航系统l的系统1。
[0086]
图6示出了标记装置4相对于坐标系k的第一位置。图7示出了标记装置4相对于坐标系k的第二位置。
[0087]
所提出的是:
[0088]-第一目标区域t1、与第一目标区域t1间隔开的第二目标区域t2、第一参考平面e1和与第一参考平面e1间隔开的第二参考平面e2相对于坐标用于成像辅助医学干预的系统k被定义,使得第一目标区域t1在第一参考平面e1中平面延伸,第二目标区域t2在第二参考平面e2中平面延伸,并且当第一校准路径c1与第一目标区域t1和第二目标区域t2相遇时,激光导航系统l关于第一校准路径c1被以足够的精度设置,
[0089]-系统1包括具有第一标记m1和与第一标记m1间隔开的第二标记m2的标记装置4,
[0090]-系统1具有定位装置5,该定位装置被设置用于将标记装置4在相对于坐标系k的第一位置中p1定位,并且将标记装置4在相对于坐标系k的第二位置中p2定位,
[0091]-其中在标记装置4相对于坐标系k的第一位置中,第一标记m1标记第一目标区域t1,并且当第一校准路径c1借助激光导航系统l是可视化的、并与第一目标区域t1相遇时,第一校准路径c1与第一目标区域t1相遇的相遇点d1作为光点f1在第一标记m1上可见,以及
[0092]-其中在标记装置4相对于坐标系k的第二位置中,第二标记m2标记第二目标区域t2,并且当第一校准路径c1借助激光导航系统l是可视化的、并与第二目标区域t2相遇时,第一校准路径c1与第二目标区域t2相遇的相遇点d2作为光点f2在第二标记m2上可见。
[0093]
第一目标区域t1和第二目标区域t2是基于第一圆柱体n1定义的,第一校准路径c1的额定走势位于所述第一圆柱体的圆柱轴线上,其中第一目标区域t1是第一圆柱体n1和第一参考平面e1的相交面,其中第二目标区域t2是第一圆柱体n1和第二参考平面e2的相交面。
[0094]
还提出的是:
[0095]-第三目标区域t3和与第三目标区域t3间隔开的第四目标区域相对于用于成像辅助医学干预的坐标系k被定义,使得第三目标区域t3在第一参考平面e1中平面延伸,第四目标区域t4在第二参考平面e2中平面延伸,并且当第二校准路径c2与第三目标区域t3和第四目标区域t4相遇时,激光导航系统l关于第二校准路径c2被以足够的精度设置,
[0096]-其中标记装置4具有第三标记m3和与第三标记m3间隔开的第四标记m4,
[0097]-其中在标记装置4相对于坐标系k的第一位置中,第三标记m3标记第三目标区域t3,并且当第二校准路径c2借助激光导航系统l是可视化的、并与第三目标区域t3相遇时,第二校准路径c2与第三目标区域t3相遇的相遇点d3作为光点f3在第三标记m3上可见,以及
[0098]-其中在标记装置4相对于坐标系k的第二位置中,第四标记m4标记第四目标区域t4,并且当第二校准路径c2借助激光导航系统l是可视化的、并与第四目标区域t4相遇时,第二校准路径c2与第四目标区域t4相遇的相遇点d4作为光点f4在第四标记m4上可见,
[0099]-其中第一校准路径c1以锐角与第一参考平面e1和/或第二参考平面e2相交,
[0100]-其中第二校准路径c2以锐角与第一参考平面e1和/或第二参考平面e2相交,
[0101]-其中第一校准路径平面ec1垂直于第二校准路径平面ec2,所述第一校准路径平面e1垂直于第一参考平面e1并具有第一校准路径c1,所述第二校准路径平面垂直于第一参考平面e1并具有第二校准路径c2。
[0102]
还提出的是:
[0103]-第五目标区域t5和与第五目标区域t5间隔开的第六目标区域t6相对于用于成像辅助医学干预的坐标系k被定义,使得第五目标区域t5在第一参考平面e1中平面延伸,第六目标区域t6在第二参考平面e2中平面延伸,并且当第三校准路径c3与第五目标区域t5和第六目标区域t6相遇时,激光导航系统l关于第三校准路径c3被以足够的精度设置,
[0104]-标记装置4具有第五标记m5,
[0105]-其中在标记装置4相对于坐标系k的第一位置中,第五标记m5标记第五目标区域t5,并且当第三校准路径c3借助激光导航系统l是可视化的、并与第五目标区域t5相遇时,第三校准路径c3与第五目标区域t5相遇的相遇点d5作为光点f5在第五标记m5上可见,以及
[0106]-其中在标记装置4相对于坐标系k的第二位置中,第五标记m5标记第六目标区域t6,并且当第三校准路径c3借助激光导航系统l是可视化的、并与第六目标区域t6相遇时,第三校准路径c3与第六目标区域t6相遇的相遇点d6作为光点f6在第五标记m5上可见,
[0107]-其中第三校准路径c3垂直于第一参考平面e1和/或第二参考平面e2。
[0108]
此外,在此公开了一种用于检查用于成像辅助医学干预的激光导航系统的方法,该方法包括以下步骤:
[0109]-相对于用于成像辅助医学干预的坐标系,定义第一目标区域、与第一目标区域间隔开的第二目标区域、第一参考平面、和与参考平面间隔开的第二参考平面,使得第一目标区域在第一参考平面中平面延伸,第二目标区域在第二参考平面中平面延伸,并且当第一
校准路径与第一目标区域和第二目标区域相遇时,关于第一校准路径以足够的精度设置激光导航系统,
[0110]-借助激光导航系统可视化第一条校准路径,
[0111]-借助定位装置将标记装置在相对于坐标系的第一位置中定位,其中标记装置具有第一标记和与第一标记间隔开的第二标记,其中在标记装置相对于坐标系的第一位置中,第一标记标记第一目标区域,并且当第一校准路径借助激光导航系统是可视化的、并与第一目标区域相遇时,第一校准路径与第一目标区域相遇的相遇点作为光点在第一标记上可见,其中检查光点在第一标记上是否可见,
[0112]-借助定位装置将标记装置在相对于坐标系的第二位置中定位,其中在标记装置相对于坐标系的第二位置中,第二标记标记第二目标区域,并且当第一校准路径借助激光导航系统是可视化的、并与第二目标区域相遇时,第一校准路径与第二目标区域相遇的相遇点作为光点在第二标记上可见,其中检查光点在第二标记上是否可见。
[0113]
检查光点在第一标记上是否可见和/或光点在第二标记上是否可见可以例如由用户、特别是临床用户来执行直接,和/或由其借助捕捉标记装置的相机的相机图像和显示相机图像的屏幕来执行。
[0114]
检查光点在第一标记上是否可见和/或在第二标记上是否可见光点可以例如基于来自标记装置的相机图像和被配置用于识别像机图像中的的光点和标记的算法来自动化地和/或增强地实现。
[0115]
图8示出了用于检查用于成像辅助医学干预的激光导航系统l的方法的流程图,该方法包括以下步骤:
[0116]-相对于用于成像辅助医学干预的坐标系k,定义def第一目标区域t1、与第一目标区域t1间隔开的第二目标区域t2、第一参考平面e1和与第一参考平面e1间隔开的第二参考平面e2,使得第一目标区域t1在第一参考平面e1中平面延伸,第二目标区域t2在第二参考平面e2中平面延伸,并且当第一校准路径c1与第一目标区域t1和第二目标区域t2相遇时,激光导航系统l关于第一校准路径c1设置有足够的的准确度,
[0117]-借助激光导航系统l可视化vis第一校准路径c1,
[0118]-借助定位装置5将标记装置4在相对于坐标系k的第一位置中定位pos1,其中标记装置4具有第一标记m1和与第一标记m1间隔开的第二标记m2,其中在标记装置4相对于坐标系k的第一位置中,第一标记m1标记第一目标区域t1,并且当第一校准路径c1借助激光导航系统l是可视化的、并与第一目标区域t1相遇时,第一校准路径c1与第一目标区域t1相遇的相遇点d1作为光点f1在第一标记m1上可见,其中检查光点f1在第一标记m1上是否可见,和
[0119]-借助定位装置5将标记装置4在相对于坐标系k的第二位置中定位pos2,其中在标记装置4相对于坐标系k的第二位置中,第二标记m2标记第二位置目标区域t2,并且当第一校准路径c1借助激光导航系统l是可视化的、并与第二目标区域t2相遇时,第一校准路径c1与第二目标区域t2相遇的相遇点d2作为光点f2第在二标记m2上可见,其中检查光点f2在第二标记m2上是否可见。
[0120]
在本实用新型的范围内,关于本实用新型的不同实施例和/或不同权利要求类别(方法、用途、设备、系统、布置等)描述的特征可以组合以形成本实用新型的进一步实施例。方法的功能特征可以通过相应设计的物理组件来实现。除了在本技术中明确描述的本实用
新型的实施例之外,本领域的技术人员在不脱离本实用新型的范围的情况下可以想到本实用新型的各种其他实施例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1